
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
141 - 160 / 1,443
物体の姿勢を求める方法及びシステム
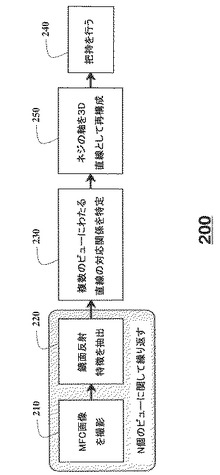
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
画像処理装置および画像処理方法

【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
テクスチャ評価装置、テクスチャ評価方法
【課題】対象物の表面において多数の凹凸が繰り返し形成された領域全体についての評価が可能なテクスチャ評価装置、テクスチャ評価方法を提供する。
【解決手段】テクスチャ評価装置1は、3次元計測部2と、3次元計測部2から計測データを入力する入力部3と、距離画像の生成などを行う演算部4と、評価結果を表示する表示部6とを備えている。3次元計測部2は、対象物10表面までの距離を計測し、計測した距離値を計測データとして入力部3に出力する。演算部4は、3次元計測部2から入力部3に入力された距離値を用いて、距離値を画素値とする距離画像を生成する距離画像生成部41を有している。さらに、演算部4は、距離画像の全体についてのテクスチャの凹凸の形状を表す測度の分布を求め、当該分布の統計量を特徴量として算出する特徴量算出部42と、算出された特徴量に基づいてテクスチャの評価を行う評価部43とを有している。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
検査装置における良品判定基準設定方法及び良品判定基準設定装置
【課題】検査対象物について検査装置を用いて得た検査計量値を基に検査対象物の良否を判定する検査装置において、検査対象物が良品であるか不良品であるかを判定する良品判定基準を設定する良品判定基準設定方法。
【解決手段】複数の良品について検査装置を用いて得た良品計量値の分布と、複数の不良品について検査装置を用いて得た不良品計量値の分布とを求め、前記良品計量値の分布と、前記不良品計量値の分布とを、横軸を検出画素数、縦軸をサンプル数として同一の画面上に表示し、当該同一の画面上において両者を比較して、上限の良品判定基準を、前記良品計量値の分布において上限側における不良品計量値の分布の下限より小さなものに設定し、下限の良品判定基準を、下限側における不良品計量値の分布の上限より大きなものに設定する。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
被写体位置計測装置、ディスプレイシステム、および被写体位置計測方法
【課題】被写体位置計測装置および被写体位置計測方法において、撮影人物の頭部等の被写体の一部分の位置を求める際、簡単な方式で上記一部分の位置を安定して求める。
【解決手段】被写体の一部分を球状体と見なして前記一部分の位置を求める。具体的には、装置は、少なくとも2方向からカメラを用いて撮影した被写体の前記一部分の画像のそれぞれにおいて、画像中の前記被写体の輪郭像を抽出する。さらに、前記輪郭像と前記画像中の第1の方向に延びる探索直線とが接する接点位置情報を求めることにより、撮影空間内において、前記カメラから延びて被写体の前記一部分と接する第1仮想直線を前記輪郭像のそれぞれについて求める。さらに、前記撮影空間において、前記第1仮想直線を前記第1の方向に対応する方向に所定の距離それぞれ平行移動した第2仮想直線同士の交点または前記第2仮想直線同士が最接近する点の位置を、前記一部分の中心位置として求める。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
測定装置
【課題】測定対象物の位置を高精度に測定する測定装置を低コストで提供する。
【解決手段】変調部によって第1周波数で変調された基準光からデジタル基準信号を取得し、前記第1周波数で変調された光が照射された測定対象物から反射された測定光からデジタル測定信号を取得し、前記デジタル基準信号と前記デジタル測定信号とを処理して前記測定対象物の位置を測定する装置は、前記デジタル測定信号に前記デジタル基準信号と同期したサイン信号又はコサイン信号を乗算して、第2周波数および高調波の成分を有する信号をそれぞれ出力する第1および第2同期検波部と、前記第1又は第2同期検波部から出力された信号をデシメーション周波数でフィルタリングして前記高調波の成分を減衰させる第1および第2デシメーションフィルタと、前記第1および第2デシメーションフィルタから出力された信号に基づいて前記測定対象物の位置を演算する演算部とを備える。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
光センサ装置
【課題】光の角度を検出すると共に、光の受光量の低減が抑制された光センサ装置を提供する。
【解決手段】複数の光電変換部がマトリックス状に配置されたイメージ部と、該イメージ部を走査する走査部と、イメージ部の出力信号を処理する処理部と、を備える光センサ装置であって、各光電変換部は、2行2列に配置された4つの受光素子と、4つの受光素子に対応して、受光素子の上方に位置する遮光膜に形成された1つの開口部と、を有し、処理部は、少なくとも1つの光電変換部の出力信号に基づいて、光の入射角度を検出する角度検出部と、全ての光電変換部の出力信号に基づいて、画像を生成する画像生成部と、を有し、4つの受光素子それぞれは平面矩形状を成し、隣り合う領域の間隔が等しく一定となっている。
(もっと読む)
通過者識別装置
【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
配管内監視装置およびそれを用いる配管内監視システム
【課題】配管内の状態を監視する装置において、流量低下要因を容易に判別可能とする。
【解決手段】配管経路に検査用透明配管11を介在し、照明光源15でその検査用透明配管11の外側から検査用の照明光を照射し、それによる該検査用透明配管11の透過または反射光をカメラ16で撮像し、パーソナルコンピュータ17で光強度を解析することで、該検査用透明配管11の内壁への付着物の状態を検出する。したがって、設備経路配管全体の内壁の錆び、スケール、スライム等の付着状態を、簡便に安価な方法で連続して監視することができる。また、経路配管全体の情報が得られるので、配管内流量に低下が生じている場合、その原因が配管全体の内壁への固体付着による管径細りなのか、局所的な異物付着なのかを簡単に判別することもできる。
(もっと読む)
ロール変位測定方法、及びそれを用いたロール変位測定装置、並びにフィルム厚測定方法、及びそれを用いたフィルム厚測定装置
【課題】被測定物が掛けられるロールの変位を高精度に測定し、被測定物の材質に拘わらず、被測定物の厚さ寸法を高精度に測定する。
【解決手段】ロール2の周面に、ロール軸に沿って延びる複数のマーキング2aを平行に設け、検出ヘッド5に、前記マーキングの接近を検出する近接センサ18,19を、前記ロールの中心軸を挟んで相対向する位置にそれぞれ設け、前記ロールにフィルム20が掛けられていない状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第一の検出時間差と、前記ロールにおける第一の回転速度とを求めるステップと、前記ロールにフィルムが掛けられた状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第二の検出時間差と、前記ロールにおける第二の回転速度とを求めるステップと、前記第一及び第二の検出時間差と、前記第一及び第二の回転速度とに基づいて、前記ロールの変位を求める。
(もっと読む)
表面形状測定方法
【課題】表面形状測定機の測定視野以上の測定領域の測定をするに際して、複数の測定結果の繋ぎ合せを簡易に行うことを可能とし、オーバーラップ領域を低減して全体の測定時間を削減し、さらに一定の累積誤差の発生を低減することが可能な表面形状測定方法を提供すること。
【解決手段】面測定データの繋ぎ合せ時に回転方向の補正を行わず、面測定データの平行移動のみを行い面測定データを合成して合成面測定データを取得するようにする。
(もっと読む)
基板検査方法
【課題】複数の投影部を通して測定対象物が形成された基板を検査する基板検査方法を提供する。
【解決手段】複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得する(S110)。以後、投影部別位相データを用いて基板に対する投影部別高さデータを抽出する(S120)。その後、各投影部別で投影部別高さデータを用いて抽出された高さデータの傾きを補正する(S130)。その後、傾き補正が完了した投影部別高さデータを整列させ(S140)、整列された高さデータを用いて統合高さデータを抽出する(S150)。このように、複数の投影部から抽出された高さデータを整列させる前に各投影部別に測定された高さデータに対する傾きを補正することによって、統合高さデータの信頼性を向上させることができる。
(もっと読む)
表面形状測定方法及び測定装置
【課題】正確性が向上した表面形状測定方法および測定装置を提供する。
【解決手段】このような表面形状測定方法は、少なくとも二以上の方向でパターン光を測定対象物に照射し、測定対象物から反射されたパターンイメージを取得する段階と、前記パターンイメージを用いて前記方向における高さを取得する段階と、前記方向における前記高さの増加率を表すベクトル場を取得する段階と、前記方向における前記高さに対する信頼指数を取得する段階と、前記信頼指数及び前記ベクトル場を用いて、統合ベクトル場を取得する段階及び前記統合ベクトル場を用いて測定対象物の各座標値に対する高さを測定する段階を含む。
(もっと読む)
表面検査装置のシェーディング補正方法
【課題】シェーディングの状態や、その雑音成分が変化しても、リアルタイムにシェーディング補正が可能な表面検査装置のシェーディング補正方法を提供することを目的とする。
【解決手段】予め記憶された前回走査時までの走査検出信号で生成した第1のシェーディング補正信号s8を元にして閾値信号s3、s4を生成し、今回の走査時の走査検出信号s1に含まれる欠陥部に対応する位置の信号値を第1のシェーディング補正信号s8で置換してアルタイムに補正走査信号s6を求め、今回の走査時の走査検出信号を正規化するようにしたことを特徴とする表面検査装置のシェーディング補正方法。
(もっと読む)
141 - 160 / 1,443
[ Back to top ]