
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
101 - 120 / 1,443
ノズル外観検査装置、およびノズル外観検査方法
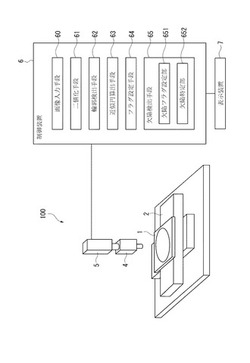
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
ウエハの特性決定のための方法とシステム

【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
面積計測装置および面積計測方法
【課題】 基準面に載った流動体が占める面積を測定する技術を提供する。
【解決手段】 流動体(20)が広がった所定の基準面(10)および前記流動体(20)の境目に対してポイント照射光を照射する照射ポインタ(70)と、 その照射ポインタ(70)によって照射される前記基準面(10)および前記流動体(20)の境目を連続撮影する連続撮影用カメラ(48)と、 その連続撮影用カメラ(48)の撮影領域に入るように固定された面積算出の基準となる面積基準体(80)と、 前記の連続撮影用カメラ(48)にて連続撮影された画像データにおける前記の面積基準体(80)および前記のポイント照射光がなぞった軌跡にて囲われた流動体(20)の面積を算出する面積算出手段と、を備える。 前記の照射ポインタ(70)が照射するポイント照射光は、前記の流動体(20)および前記の基準面(10)と明確に区別可能な色彩とする。
(もっと読む)
回折光学素子及び計測装置
【課題】均一な光量分布の回折パターンが得られる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されており、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記回折光を平面上に投影させることにより、前記平面上の所定の範囲内に複数の光スポットを発生させるものであり、前記所定の範囲を4角形とした場合、前記所定の範囲を略同一形状となるNx×Ny個以上の領域に均等に分割し、前記分割された領域のうち、前記所定の範囲の中心領域における領域の前記光スポットの数をMcとし、前記所定の範囲の4隅における領域の前記光スポットの数の平均をMoとし、前記所定の範囲に照射される最大の回折角度をθdとした場合に、Nx及びNyはともに3以上の奇数であって、15°≦θd、Mo/Mc>−0.02173×θd+1.314であることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
計測装置
【課題】被加工物の研削時におけるノイズ信号による誤判定を防止し、被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の上面で反射した反射光と光路長が一定の基準反射光に基づいて被加工物の厚み方向における上面までの2点間の距離を計測する計測装置であって、被加工物の上面で反射した反射光と光路長が一定の基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準反射光の光路長との光路長差に対応して出力される信号強度における現在出力された値と前に出力された値との絶対値の差を求め、この絶対値の差を各光路長差毎の信号強度における現在出力された値に加算し、加算された値が最も高い光路長差を被加工物の厚み方向における上面までの2点間の距離として決定する。
(もっと読む)
欠陥検出方法及び欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいて、構造パターンの外周形状であるエッジを検出し、ライン検出工程により、エッジの最外周画素の集合であるラインを検出し、構造ライン取得工程によりエッジが境界となる複数の構造パターンに対してそれぞれに接するラインである構造ラインを取得し、エッジ幅取得工程により2つの異なる構造ライン間の距離をエッジ幅として取得し、平均エッジ幅算出工程により同じ構造ライン上の任意の2点を始点及び終点として設定し、始点から終点までの平均エッジ幅を取得する。そして、欠陥検出工程により、平均エッジ幅とエッジ幅とを比較し欠陥を検出する。
(もっと読む)
走路推定装置及びプログラム
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
観察対象物の表面の3次元ビューを表示するための方法および装置
【課題】観察対象物の表面の3次元ビューを表示し、表面の凹凸、寸法を取得する方法及び装置を提供する。
【解決手段】複数の表面点の第1の座標系における3次元座標を決定し、観察対象物の表面の複数の測定点を選択し、複数の測定点のうちの1つまたは複数に隣接した複数の表面点のうちの3つ以上の第1の座標系における3次元座標に基づいて基準表面250を決定し、基準表面および複数の測定点に基づいて第1の座標系とは異なる第2の座標系を設け、複数の表面点の第1の座標系における3次元座標を第2の座標系における3次元座標に変換し、複数の測定点に基づいて、観察対象物202の表面210の対象領域262内である複数の表面点のサブセットを決定し、第2の座標系の3次元座標に複数の表面点のサブセットの描画された3次元ビューを表示する。
(もっと読む)
トロリ線の摩耗状態監視装置
【課題】トロリ線とパンタグラフが離れたときに発生するアークを検知し、このときのトロリ線の下面、すなわち摩耗面を閲覧することができるトロリ線の摩耗状態監視装置を提供する。
【解決手段】トロリ線の摩耗状態監視装置において、車両10の屋根10a上にパンタグラフ11に向けて設置されパンタグラフ11を監視するエリアカメラ1と、前記車両10の屋根10a上に鉛直上向きに設置されトロリ線13の下面を撮影するラインセンサカメラ2と、前記エリアカメラ1及び前記ラインセンサカメラ2により撮影した画像を入力及び録画し、前記パンタグラフ11からアークが発生したときの前記ラインセンサカメラ2により撮影した画像を閲覧することができる画像処理装置3とを備えることとした。
(もっと読む)
膜形状取得装置および膜形状取得方法
【課題】テクスチャ構造を有する対象物上に形成された薄膜の形状を容易かつ高精度に取得する。
【解決手段】膜形状取得装置1では、上面に複数のテクスチャ凸部を有する基板9上に形成されたシリコン膜の光学モデルにおいて、複数のテクスチャ凸部に一致する薄膜凹部およびその上方に位置する薄膜凸部が設定される。そして、薄膜凸部、薄膜凹部、および、薄膜凸部と薄膜凹部との間の中間部の形状を表すパラメータ群に含まれる各パラメータを有効膜厚にて表現し、有効膜厚を変更することにより各パラメータの値を変更して理論スペクトルの測定スペクトルに対するフィッティングが行われる。これにより、シリコン膜の形状を容易かつ高精度に取得することができる。
(もっと読む)
光検査方法及びその装置
【課題】
光検査装置において、検出する光が微弱な場合に問題となる量子ノイズの影響を抑制する。
【解決手段】
光検査装置を、試料に光を照射する光照射手段と、参照光を発射する参照光手段と、光照射手段により光が照射された試料からの透過光または散乱光または反射光と、参照光手段から発射された参照光とを干渉させて干渉光を生成する光干渉手段と、光干渉手段により生成した干渉光を検出する光検出手段と、光検出手段により干渉光を検出して得られた検出信号に基づいて欠陥の有無を識別する欠陥識別手段と、試料からの透過光または散乱光または反射光の状態または参照光手段から発射された参照光の状態または光干渉手段により生成した干渉光の状態のうち少なくとも一つを変換する光変換手段とを備えて構成した。
(もっと読む)
形状測定方法
【課題】形状測定装置自体の振動や蛇行の影響を受けずに測定対象の形状を正確に測定すること。
【解決手段】高さ方向に関する測定対象の形状を左右同時に測定する測定ステップ(STP1)と、測定対象の右側及び左側の面全体を走査する走査ステップ(STP2)と、測定対象の右側測定データと左側測定データとから、それぞれ独立に短周期成分を除去する振動除去ステップ(STP3)と、短周期成分を除去した右側測定データと左側測定データとの両方を用いて長周期成分を除去する蛇行除去ステップ(STP4)とを含む。
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
画像処理方法、画像処理装置およびそれを搭載した水中検査装置
【課題】画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上する画像処理方法,画像処理装置およびそれを搭載した水中検査装置を提供する。
【解決手段】移動体に搭載した撮影手段により被写体を連続的に撮影して撮影画像を取得し、連続して得られた2つの画像に共通に撮影されている被写体の要素を特徴量に定め、連続して得られた2つの画像に対して画像相関処理を行って特徴量の一致度を判断し、所定以上の一致度が得られない場合には新たな被写体の要素を特徴量に定め、連続して得られた撮影画像における特徴量の位置を、二次元の撮影画像の一方方向の所定位置に固定し、二次元の撮影画像の他方向の変化量を前記撮影手段の移動量とする。
(もっと読む)
欠陥検出装置及び欠陥検出方法
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
スポット像位置検出装置
【課題】受光素子の種類に依存したアルゴリズムを検討することなく、スポット像位置検出を高精度に行うことができるスポット像位置検出装置を提供する。
【解決手段】本発明のスポット像位置検出装置50は、レーザー光3を結像するレンズ(光学系)6、及び受光素子7から構成されるカメラ10と、カメラ10に対してレーザー光3を照射するレーザー光源(発光手段)1と、レーザー光源1の射出ビーム径2よりもカメラ10のレンズ6に入射する際のビーム径5が細くなる位置に配置されたレンズ(ビームウエスト光学系)4と、受光素子7上の輝度情報に基づいて光スポット像位置を算出する画像処理装置(画像処理手段)8と、画像処理装置8により画像処理された画像データを表示するディスプレイ9と、を備えて構成されている。
(もっと読む)
溶接ビード切削幅測定方法
【課題】切削部の撮影画像が不明瞭なものとなる場合にも、溶接ビート切削幅の測定の信頼性を向上させうる撮影画像データ処理方法を提供する。
【解決手段】照明光をエリア光とし、該エリア光による測定領域の照明輝度をビード長手方向で相異なる三輝度とし、これら三輝度の各領域(A,B,C各部)の撮影画像を同時に画像処理して溶接ビード切削幅を測定する。
(もっと読む)
金属缶端巻締め外観検査方法、金属缶の外観検査方法、金属缶端巻締め外観検査装置、および容器の口部検査装置
【課題】缶の巻締め部の巻締め厚さを全周にわたって精度よく計測できる金属缶端巻締め外観検査方法を提供する。
【解決手段】外観検査装置を用いた金属缶端巻締め外観検査方法は、巻締め部上方に配設したリング照明装置2からの照明光により巻締め上端両側の反射映像をリング照明装置2の中心と同軸上に配設したカメラ4で撮像し、入力映像をディジタル多階調画像に変換し、巻締め上端両側の二重のリング状画像を得、リング状画像の中心から放射状に二重のリング外側端とリング内側端とのリング幅を適宜な間隔で全周計測し、各リング幅寸法があらかじめ設定した上下限の閾値範囲外のとき、金属缶が不良品であると判別する。
(もっと読む)
101 - 120 / 1,443
[ Back to top ]