
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
61 - 80 / 1,443
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
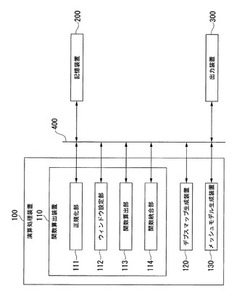
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
3次元相対座標計測装置およびその方法

【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
FPDモジュール組立装置及び表示基板の搬送方法
【課題】表示基板に設けられたアライメントマークを撮像範囲の適正位置に出現させて、表示基板の搬送を安定化させることができるFPDモジュール組立装置および表示基板の搬送方法を提供する。
【解決手段】FPDモジュール組立装置は、複数の処理ユニットと、搬送部と、カメラと、制御部とを備えている。制御部は、表示基板の生産ロットが変更されると、カメラによって撮像されたアライメントマークの座標を検出し、検出回数が所定の回数になると、検出した複数の座標の平均及び標準偏差σを算出する。そして、複数の座標から−1.5σ<P<1.5σを満たす座標を抽出し、抽出した座標の平均に基づいて搬送部による表示基板の受取位置を補正する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
物体識別装置及び物体識別プログラム
【課題】検知対象物の一部が他の障害物によって隠れているような状況下でも、その検知対象物の形状を正確に識別することができるようにする。
【解決手段】検知対象物上の各点の法線を算出する法線算出処理部3と、検知対象物上の各点を通過する直線を生成する直線生成処理部4と、3次元空間内の一定範囲の区切りである格子の中で、直線生成処理部4により生成された直線が通過する格子を特定する通過格子特定処理部5と、通過格子特定処理部5により特定された格子に対する投票を行う投票処理部6とを設け、形状推定処理部7が、3次元空間内の各格子に対する投票処理部6の投票結果から検知対象物の形状を推定する。
(もっと読む)
印刷状態計測結果の表示装置および表示方法
【課題】印刷検査によって取得した印刷状態計測情報を印刷品質向上のために有効活用することができる印刷状態計測結果の表示装置および表示方法を提供することを目的とする。
【解決手段】印刷検査装置M2による印刷検査において基板3のランドに印刷されたペーストの平面形状における面積値の正規の印刷面積に対する比率を示す面積率を複数のランドのそれぞれについて求めた面積率計測データ23aを、表示用データ作成プログラム23bに規定された所定の処理アルゴリズムにしたがってデータ処理して、基板に印刷されたペーストの印刷状態を視覚的に表示するための表示用データを作成し、作成された表示用データを表示フォーマットデータ23cに規定される所定の表示フォーマットにしたがって表示パネル26の表示画面に表示する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供する。
【解決手段】パルス光を被検物に照射する投光手段30と、前記パルス光が照射される領域を含む領域を繰り返し撮像する撮像手段20と、前記撮像手段で撮像された画像の画像信号を記憶する記憶手段40と、前記記憶手段に記憶された画像信号に対して、同期検波処理を行なって、前記投光手段から照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する同期検波処理手段と、前記被検物の移動速度を算出する移動速度算出手段と、前記移動速度算出手段により算出された前記被検物の移動速度に基づいて、前記被検物が撮像画像上を移動することにより前記検波処理画像内に発生するノイズ成分を低減するための補正を行なう補正手段と、を備える。
(もっと読む)
形状計測装置、形状計測装置の制御方法、およびプログラム
【課題】物体の反射特性によらずに高精度に形状計測ができ、また計測精度の調整が可能な光学的走査による高速な形状計測装置を提供する。
【解決手段】形状計測装置100は、スリット光1により物体を走査する光学走査手段10と、物体からの、スリット光1の反射光による計測画像を取得する撮像手段20と、取得した計測画像を基に、物体の反射位置を算出する反射位置検出手段30と、を備え、反射位置検出手段30は、取得した計測画像を構成する複数の画素に分布する計測輝度パターンから、物体の反射位置候補座標を算出し、計測輝度パターンと、反射位置候補座標を含む比較座標範囲内において所定の分解能の間隔で用意された複数の参照輝度パターンとを比較して、計測輝度パターンとそれぞれの参照輝度パターンとのパターン類似度を算出し、パターン類似度が最も大きな参照輝度パターンが特定する座標情報から、物体の反射位置座標を求める。
(もっと読む)
孔形状検査方法および孔形状検査プログラム
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法
【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
寸法測定装置
【課題】凹凸パターンの上部及び下部の寸法を明確に区別して測定する。
【解決手段】基板5上に形成された凹凸パターンを拡大観察する顕微鏡1と、前記顕微鏡1を通して観察される前記凹凸パターンを撮像する撮像カメラ2と、前記顕微鏡1の対物レンズ7の視野外からその視野内に散乱光を照射する照明光学系3と、前記撮像カメラ2の画像を入力して表示部17の画面17a上に表示し、入力手段16により入力して前記表示画面17a上に指定された範囲内の前記凹凸パターンの上部及び下部のいずれか一方、又は両方の寸法を測定する制御手段4と、を備えたものである。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
61 - 80 / 1,443
[ Back to top ]