
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
81 - 100 / 1,443
タイヤの欠陥検出方法
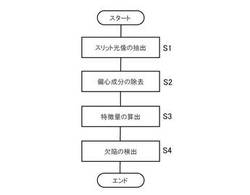
【課題】 タイヤ表面の薄広凸欠陥を高精度に検出することができるタイヤの欠陥検出方法を提供する。
【解決手段】 ステップS1を開始するまでに、予め連続的にスリット光像を含む2次元画像を取得しておく。ステップS1では、撮像された複数の2次元画像データから、スリット光像を抽出する。ステップS2では、抽出されたスリット光像から偏心によるぶれである偏心成分を除去する。ステップS3では、偏心成分を除去した光像に基づいて特徴量を算出し、ステップS4で、算出された特徴量に基づいて薄広凸欠陥を検出する。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機

【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
眼鏡用測定装置及び三次元測定装置
【課題】 被検者に負荷をかけることなく角膜眼鏡間距離等の測定を行う眼鏡用測定装置を提供する。
【解決手段】 眼鏡用測定装置(10)は、指標マーク(SC)が眼鏡フレーム(23)に取り付けられた眼鏡(20)をかけた被検者を撮影する撮影部(12)と、撮影部で撮影された被検者の眼球の頂点を求めるとともに、指標マーク(SC)に基づいて眼鏡の眼鏡レンズ(21)と被検者の眼球の頂点(KP)との角膜眼鏡間距離(KG)を演算する演算部(14)と、を備える。
(もっと読む)
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
厚さ測定装置、及び厚さ測定方法
【課題】距離検出器の設定位置に変位があっても、短時間で、測定誤差の補正が可能な厚さ測定装置、及び厚さ測定方法を提供することを目的とする。
【解決手段】基準厚さを有する第1の厚さ部と第2の厚さ部を備える校正板3と、検出部1を移動させる移動機構部2と、検出部を予め定める一定長さの「校正位置」、及び予め定められる「測定位置」に、移動を指令する位置設定部4と、を備え、位置設定部は、「校正」指令を移動機構部に送り、検出部を「測定位置」から「校正位置」に移動させ、予め設定された第1の厚さ部と第2の厚さ部との校正位置信号を厚さ演算部5に送り、厚さ演算部は、第1の厚さ部及び第2の厚さ部の厚さを求め、夫々の基準厚さとの差を求めて、「測定位置」で求めた厚さを補正し、厚さ校正板を固定し、検出部を移動させて、予め設定された第1及び第2の距離検出器の設定位置の変位による測定誤差を補正するようにしたことを特徴とする。
(もっと読む)
変位センサ
【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
形状測定装置
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
表面性状測定装置および表面性状総合評価方法
【課題】鏡面に近い面の表面性状を、それぞれの製品あるいは業界に特有の感性に近い指標に基いて定量的且つ総合的に評価できるようにする。
【解決手段】コンピュータ制御にてディスプレイ11に表示したチェックパターンを被測定面21に投影して、反射像を撮影装置12により撮影し、その画像データを収得してコンピュータ3でデータ処理するよう構成した鏡面計1を使用し、コンピュータ3に、鏡面度、鏡面度バラツキ、光沢度、シャープネス、うねり又は形状誤差、コントラストおよび白濁度といった複数の測定項目の算出ロジックを含むコンピュータソフト5を組み込んで、それら複数の測定項目を順次自動的に測定し、鏡面度を含む複数の測定項目を指標として表面性状を評価できるようにする。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
画像処理方法
【課題】複数個束ねられた偏平状態の段ボール箱の接合間隔を検査するために、検査画像に含まれる接合間隔の位置を高い精度で特定することが可能な画像処理方法を提供する。
【解決手段】境界検出ステップS1で、撮影画像における段ボール箱積層体の側面部分と背景部分との境界位置を検出し、濃度補正ステップS2で、検出された境界位置によって特定される段ボール箱積層体の側面部分を対象として濃度補正処理を行う。投影ステップでは、濃度補正処理が行われた側面部分に対して、積層方向に直交する方向に投影処理を行うことで、積層方向に直交する方向の1次元濃度データを得る。組み合わせ検出ステップで、1次元濃度データに対して、濃度が低下する範囲である谷部分とこの谷部分に隣接する、濃度が上昇する範囲である山部分との組み合わせを検出すると、決定ステップS4で、検出された組み合わせの中心位置を求め、接合間隔列の中央位置として決定する。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
塗布方法および塗布装置
【課題】各吐出ノズルの吐出量を正確に把握し、精度良く全ノズルの吐出量を調整することができる塗布方法および塗布装置を提供する。
【解決手段】吐出ノズルから液滴を吐出し、基板へ塗布を行う吐出工程と、吐出ノズルから吐出した液滴の着弾面積を測定する測定工程と、前記吐出工程における各吐出ノズルの制御量を調節する調節工程と、を有する塗布方法において、前記調節工程では、前記吐出工程が行われる前に実施された前記測定工程の過去データの蓄積から得られる統計データにもとづいて、この吐出工程における各吐出ノズルの制御量の調節を行うことを特徴とする。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
81 - 100 / 1,443
[ Back to top ]