
Fターム[2F065QQ42]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | 平均、正規化 (1,443)
Fターム[2F065QQ42]に分類される特許
161 - 180 / 1,443
ロール変位測定方法、及びそれを用いたロール変位測定装置、並びにフィルム厚測定方法、及びそれを用いたフィルム厚測定装置
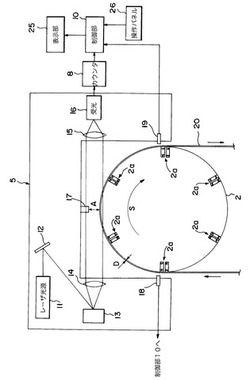
【課題】被測定物が掛けられるロールの変位を高精度に測定し、被測定物の材質に拘わらず、被測定物の厚さ寸法を高精度に測定する。
【解決手段】ロール2の周面に、ロール軸に沿って延びる複数のマーキング2aを平行に設け、検出ヘッド5に、前記マーキングの接近を検出する近接センサ18,19を、前記ロールの中心軸を挟んで相対向する位置にそれぞれ設け、前記ロールにフィルム20が掛けられていない状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第一の検出時間差と、前記ロールにおける第一の回転速度とを求めるステップと、前記ロールにフィルムが掛けられた状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第二の検出時間差と、前記ロールにおける第二の回転速度とを求めるステップと、前記第一及び第二の検出時間差と、前記第一及び第二の回転速度とに基づいて、前記ロールの変位を求める。
(もっと読む)
表面形状測定方法

【課題】表面形状測定機の測定視野以上の測定領域の測定をするに際して、複数の測定結果の繋ぎ合せを簡易に行うことを可能とし、オーバーラップ領域を低減して全体の測定時間を削減し、さらに一定の累積誤差の発生を低減することが可能な表面形状測定方法を提供すること。
【解決手段】面測定データの繋ぎ合せ時に回転方向の補正を行わず、面測定データの平行移動のみを行い面測定データを合成して合成面測定データを取得するようにする。
(もっと読む)
基板検査方法
【課題】複数の投影部を通して測定対象物が形成された基板を検査する基板検査方法を提供する。
【解決手段】複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得する(S110)。以後、投影部別位相データを用いて基板に対する投影部別高さデータを抽出する(S120)。その後、各投影部別で投影部別高さデータを用いて抽出された高さデータの傾きを補正する(S130)。その後、傾き補正が完了した投影部別高さデータを整列させ(S140)、整列された高さデータを用いて統合高さデータを抽出する(S150)。このように、複数の投影部から抽出された高さデータを整列させる前に各投影部別に測定された高さデータに対する傾きを補正することによって、統合高さデータの信頼性を向上させることができる。
(もっと読む)
表面欠陥検査装置
【課題】金属帯の幅方向に配列された複数台の撮像装置に故障などの異常が生じたことを正確に検出して表面欠陥の見逃し等を防止することのできる表面欠陥検査装置を提供する。
【解決手段】表面欠陥検査装置2は、撮像装置3〜6と、その撮像領域に照明光を照射する照明装置7と、撮像装置により撮像された画像を記憶する画像メモリ9と、画像メモリに記憶された画像を画像処理して金属帯1の表面欠陥を検出する欠陥検出装置10とを備え、さらに、画像メモリに記憶された画像から金属帯のエッジを検出するエッジ検出部16と、検出されたエッジから金属帯の板幅を算出する板幅算出部17と、撮像装置から出力された画像信号の平均輝度レベルを算出する平均輝度算出部18と、算出された板幅を金属帯の真の板幅情報と比較すると共に算出された平均輝度レベルを閾値レベルと比較して撮像装置3〜6の異常を判断する異常判断部19とを有してなる異常検出装置15を備えている。
(もっと読む)
高さ測定方法および電子ビーム描画装置
【課題】試料の高さを正確に測定することのできる高さ測定方法と、高さを正確に測定して高い精度で描画することのできる電子ビーム描画装置とを提供する。
【解決手段】光の波長を所定値としたときの反射光の光量を測定し、光量が閾値以下である場合には光の波長を変えて反射光の光量を測定する工程を繰り返し、光量が閾値より大きくなる波長で試料の高さを測定する。あるいは、光の波長を変えて反射光の光量を測定し、光量が最大となる波長で試料の高さを測定する。
(もっと読む)
パッケージのサイズを測定するための装置
【課題】正確な測定、使用の容易さおよび効率、適応性および柔軟性を有するレセプターモジュールの複数の信号レセプターを調整する方法を提供する。
【解決手段】各レセプターに対して、(a)レセプターを最大の信号にさらす工程と、(b)レセプターの出力を最大の信号から測定する工程と、(c)レセプターを最小の信号にさらす工程と、(d)レセプターの出力を最小の信号から測定する工程と、(e)最大の信号から所定基準の最大に出力をマッピングし、最小の信号から所定基準の最小に出力をマッピングするマッピング機能を決定する工程と、(f)複数の測定における使用に対して、レセプターモジュールに結合されたローカル制御装置においてマッピング機能を記憶する工程とを含む。
(もっと読む)
物体測定装置、物体測定方法、及び物体測定プログラム
【課題】回転工具の形状と性状を同時に測定する方法を提供する。
【解決手段】画像記憶部107は、回転する物体を撮影した画像を記憶する。画像処理部108は、一の撮影した画像の輝度値と他の撮影した画像の輝度値を画素毎に比較して輝度値画像を生成する。また、画像処理部108は、基準となる形状を示す基準画像の輝度値と輝度値画像の輝度値との差分に基づいて差分画像を生成する。性状算出部110は、差分画像に基づいて物体の性状を示す性状変数を算出する。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
画像処理装置、方法およびそのプログラム
【課題】2次元画像からより正確な奥行きを生成する。
【解決手段】実施の形態によれば、検出部は、画像に含まれる物体を検出する。選択部は、検出された物体の性質に応じて物体の奥行きの情報のベースとするデプスモデルを選択する。セグメント部は、検出された物体の領域を画像から区分する。デプスマップ生成部は、画像の奥行きを表現するデプスマップを生成する。この際、デプスマップ生成部は、画像中の検出された物体の位置に対応するデプスマップ上の位置に、デプスモデルを配し、配されたデプスモデルの領域と物体の領域とを比較し、互いに重なり合わない位置に対して、補正後の奥行値を与える。
(もっと読む)
エッジ検出方法およびエッジ検出装置
【課題】凸レンズの周縁の形状を簡易な構成で精度良く検出することができるエッジ検出方法およびエッジ検出装置を提供すること。
【解決手段】凸レンズ100を撮像する撮像部2を用いて凸レンズ100の周縁の形状を検出させるためのエッジ検出方法であって、出射開口11aが形成されたマスク11の出射開口11aを通じて撮像部2へ向けて拡散光を発し、出射開口11aと撮像部2との間の撮像光学系3の被写界深度内に凸レンズ100を配置し、撮像部2の撮像面4aに、拡散光が凸レンズ100を透過して撮像部2へ入射した第一拡散光L1と、拡散光が凸レンズ100の外部を通って撮像部2へ入射した第二拡散光L2とによってマスク11の像を投影させ、第二拡散光L2による明部とマスク11の像による暗部との境界の形状に基づいて凸レンズ100の周縁の形状を検出することを特徴とする。
(もっと読む)
干渉計測方法および干渉計測装置
【課題】 干渉計測の応答速度を損なう事無く高精度な屈折率補正を実現可能な干渉計測方法を提供する。
【解決手段】 参照面で反射された光束と被検面で反射された光束との干渉信号を検出することによって被検光路の幾何学的距離を計測する干渉計測方法において、互いに波長が異なる複数の光束を用いて被検光路の光路長を算出する多波長光路長算出工程、多波長光路長算出工程で算出された被検光路の光路長から被検光路の空気の屈折率を算出する屈折率算出工程、屈折率算出工程で算出された屈折率を平滑化することによって平滑化屈折率を算出する平滑化屈折率算出工程、平滑化屈折率算出工程で算出された平滑化屈折率から被検光路の幾何学的距離を算出する幾何学的距離算出工程を有する事を特徴とする。
(もっと読む)
構造物モデル作成装置及びその方法
【課題】構造物の撮影画像に基づいて、構造物の面及び交線の位置を自動計測し、構造物モデルを自動的に作成し、表示可能な構造物モデル作成装置を提供する。
【解決手段】本発明による構造物モデル作成装置1は、コード付き標識CTを配置した測定対象面2の撮影画像3を取得する画像データ取得部4と、同一測定対象面に配置されたコード付き標識CTが同一グループに属するようにコード付き標識CTをグループ分けする標識グループ化部71と、測定対象面2の面方程式を算出する面方程式算出部72と、測定対象面間の交線を求める交線算出部74と、1つのグループに対応する測定対象面2に隣接する隣接測定対象面を特定する隣接面特定部73と、各グループに対応する測定対象面と隣接測定対象面との交線とを表示する表示部12とを備える。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とすることを課題とする。
【解決手段】被判別対象の撮影工程と、被判別対象の二値化画像を作成する二値化工程と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程と、前記二値化画像の容器の口部分を含む画像部分を、容器を輪切りするように帯状に複数の区域に区分けする区域分け工程と、前記区域毎に容器に該当する領域の横幅をそれぞれ計測する横幅計測工程と、前記区域毎に、各区域において同一の方向に隣接する区域との前記横幅の差又は比率を求め、求めた値を判別値とする判別値演算工程と、前記判別値と事前に設定した閾値とを比較する形状判断工程とからなり、該形状判断工程での比較の結果に基づいて前記容器がペットボトルであるか否かを判別する、という技術的手段を講じた。
(もっと読む)
回折光学素子及び計測装置
【課題】均一で安定性の高い光スポットを発生させる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されている第1の回折素子と、複数の基本ユニットが2次元的に配列されている第2の回折素子と、を有し、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記第1の回折素子において前記基本ユニットの配列方向を第1の方向とし、前記第2の回折素子において前記基本ユニットの配列方向を第2の方向とし、前記光が前記第1の回折素子、前記第2の回折素子の順に入射するとき、前記第1の回折素子で発生する回折光がさらに、前記第2の回折素子に入射して発生する0次光の最近接距離をΔxとし、前記第2の回折素子により発生する回折光及び迷光における最近接距離をαとした場合、前記第1の方向と前記第2の方向のなす角φが、−|φ1|<φ<|φ1|、かつ、φ≠0、sinφ1=−α/Δxであることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
球体の位置測定装置及び方法
【課題】円軌道上を公転する球体の位置を好適に測定することができる球体の位置測定装置を提供する。
【解決手段】球体の位置測定装置は、円軌道の中心線O上に中心を有するリング照明18と、前記中心線O上に配置されたレンズ20を有し、前記中心線Oを含む範囲で前記球体13を撮像する撮像部17と、前記撮像部17によって撮像された画像中における、前記球体13の表面で反射した前記リング照明18の反射光を認識し、この反射光の領域の重心位置を求める画像処理部22と、を備える。
(もっと読む)
動画追尾装置、動画追尾方法および動画追尾プログラム
【課題】線上での追尾点の動きを容易に把握することができるとともに、動画中での任意の時点の追尾点の状態を容易に観察することが可能な動画追尾装置、動画追尾方法および動画追尾プログラムを提供する。
【解決手段】複数フレームの画像データに基づいて表示部20の画像表示領域Taに画像が表示される。画像表示領域Taの画像内で追尾点および追尾線が設定されると、設定された追尾線上での追尾点の位置を識別する追尾動作が各フレームの画像において実行される。また、複数フレームの画像における追尾動作により識別された追尾点の位置の時間変化を示す追尾結果時間変化線が表示部20の画像表示領域Tbに表示される。画像表示領域Tbに表示される追尾結果時間変化線の時間軸方向の位置が現在表示位置バーLにより指定されると、指定された位置に対応するフレームの画像が画像表示領域Taに表示される。
(もっと読む)
パターンの形成された基板の粗さを得る方法、パターンの形成された基板の粗さを得るための装置
【課題】パターン付きウェハの表面粗さを高精度で非破壊に測定できる平坦な検査範囲を、目視によらず探索できる表面検査装置を提供する。
【解決手段】照射される照射光により生じる散乱光の散乱光強度を、パターン付きウェハ200上の測定座標に対応付けて測定し、ウェハ200の表面粗さを検査する表面検査装置において、制御部が、下限閾値以上である散乱光強度の測定座標を抽出し、抽出された測定座標の周辺に相当するパターンの全体レイアウト401の一部の部分レイアウト405a内に、表面粗さの検査の検査範囲406を設定し、検査範囲406における表面粗さを求める。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
161 - 180 / 1,443
[ Back to top ]