
Fターム[2F069AA02]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 1次元 (162)
Fターム[2F069AA02]に分類される特許
121 - 140 / 162
放射線撮像装置

【課題】 2方向の基準位置を検出するのに1方向のみに統合することができる放射線撮像装置を提供することを目的とする。
【解決手段】 位置変換機構5が2方向であるX方向およびY方向のうち一方の方向であるX方向の基準位置を他方の方向であるY方向の基準位置に変換する。そして、フォトセンサ5は、上述した位置変換機構5で変換されたY方向の基準位置を検出して、装填される各フィルムカセッテ1の大きさ(サイズ)をそれぞれ検出する。これによって、2方向の基準位置を検出するのに他方の方向であるY方向のみに統合することができる。
(もっと読む)
車両のシートスライド装置

【課題】 位置検出手段による検出部がレールの外部にあると、誤検出を生じる場合がある。
【解決手段】 上部が開口する略コ字形状に屈曲形成され車両のフロアに固定されたロアレール1の前記開口部に、下部が開口する略コ字形状に屈曲形成されシートに固定されたアッパレール2がスライド自在に嵌挿され、アッパレール2に回動可能に支持したロック爪7と、ロアレール1の内部に固定されてロック爪7が係脱可能なロックプレート10とにより、ロック機構6が構成され、前記アッパレール2の位置を検出する近接センサ30がアッパレール2に設けられ、該近接センサ30の検出面30bが、前記ロックプレート10の側面に臨ませてある。
(もっと読む)
油圧作業機械における油圧シリンダのストローク位置計測装置
【課題】
新規に演算処理能力の高い大容量のメインコントローラを開発することなく、多数の油圧シリンダのストローク位置を高精度に計測出来るようにする。
【解決手段】
制御用コントローラ20とは独立して計測用コントローラ30が設けられ、この計測用コントローラ30に回転センサ100、リセットセンサ300の検出信号を入力させてストローク位置の計測処理を行わせ、計測結果を制御用コントローラ20に送るようにする。計測用コントローラ30の記憶テーブル36には、予め回転センサ100の出力電圧値と回転角度との対応関係が記憶されており、回転センサ100の検出信号が入力されると、記憶テーブル36の対応関係を参照して対応する回転角度が求められ、求められた回転角度に基づいて油圧シリンダ200のストローク位置が計測される。
(もっと読む)
アクチュエータと計測点対応付け装置、その方法、およびプログラム
【課題】外乱の影響を受けることなく、アクチュエータの操作点とシートの幅方向の計測点との位置対応を高精度に検出することが可能なアクチュエータと計測点対応付け装置、アクチュエータと計測点対応付け方法、およびコンピュータが実行するためのプログラムを提供することを目的とする。
【解決手段】制御装置19のアクチュエータと計測点対応付け手段は、アクチュエータの操作量を時系列の所定パターンで変化させた場合のシートの厚み変化を計算モデルを使用して予め予測値として算出しておき、所定パターンで複数のアクチュエータを操作した場合に、計測手段で計測される実計測値を取得し、予測値と実計測値との時系列データの相関を算出し、当該相関値に基づいて、各アクチュエータと計測点の対応位置を検出する。
(もっと読む)
検査装置および検査方法
【課題】 検査対象の良否を高速に検査できる検査装置および検査方法を提供する。
【解決手段】 検査対象である液晶パネル(ガラス基板)10の上部にセンサ1を固定して、その検査対象10をエアフローにより浮上させて非接触検査を行う際,測長部4によるレーザ測長によりセンサ1と液晶パネル10間の距離を計測し、その結果をもとにセンサ側からも、エアー噴出部11によるエアー噴出を行ってセンサ1と液晶パネル10間の間隔(ギャップ)を制御する。
(もっと読む)
位置検出装置、及び位置検出方法
【課題】移動部材(例えば、操作レバー)の移動路上での位置の検出を効率良く行うこ
とのできる位置検出装置を提供すること。
【解決手段】操作レバーの移動路上での位置を検出する位置検出装置において、操作レ
バーの移動路上での移動に応じて回転する回転部材の回転角を検出するエンコーダ22d
から送信される、回転角に対応した信号を受信する受信部13と、受信した回転角に対応
した信号に基づいて、操作レバーの移動路上での移動状態を検出する移動状態検出手段と
、その移動状態に基づいて、操作レバーの移動路上での位置を検出する位置検出手段とを
装備する。
(もっと読む)
撮像装置
【課題】より正確にレンズ位置を測定する撮像装置を提供する。
【解決手段】撮像装置100はレンズ2を挟んで配置されるフォトリフレクタPR1、PR2の出力を比較し、撮像装置100aは基準点となる反射板7a、7bの間にフォトリフレクタPR1、PR2を配置してその出力を比較し、出力の大きいフォトリフレクタを元にレンズ位置を検出する相補的な構成である。
(もっと読む)
ステージ制御装置及びその方法、ステージ装置並びに露光装置
【課題】ウエハ表面の凹凸やパターン段差が大きかった場合でもステージが十分に追従できるようなステージ制御を実現する。
【解決手段】基板を載置して移動可能なステージを制御するステージ制御装置は、基板の表面の凹凸形状に対応する基板面位置情報に基づいてステージの鉛直方向に関する目標値を生成し、生成された目標値とステージの計測位置との偏差信号に基づいて該ステージの駆動指令信号を生成する。ここで、基板の表面の凹凸形状が有する空間周波数に基づいて目標周波数が決定され、駆動指令信号の生成には、上記偏差信号の目標周波数の成分を増幅して得られた信号が用いられる。
(もっと読む)
印刷技術的な機械を通ってシートを搬送するための装置
【課題】印刷技術的な機械を通ってシートを搬送するための装置であって、回転する搬送エレメントが設けられており、搬送エレメントがグリッパを備えており、グリッパにシートが前縁で保持されており、所望の位置に関してシートの位置を調節するための装置が設けられており、シート位置のための測定装置が設けられており、制御装置が設けられており、制御装置が、シート位置調節装置および測定装置と接続されている形式のものにおいて、比較的大きな時間間隔にわたってガイドエレメントに関するシートの位置を連続的に監視できるようなものを提供する。
【解決手段】測定装置10,11が、搬送エレメントと共に回転するように配置されている。
(もっと読む)
ストローク測定装置
【課題】動力源が不要であり、人手により簡単に操作できる、シンプルな構成のストローク測定装置を提供する。
【解決手段】駆動力により変位するとともに荷重により厚さが変わる可動部が配設されるケースに、着脱可能に保持される保持部と、該可動部の変位方向と向き合って該可動部に当接し、該保持部に対して相対変位可能に保持される当接部と、該当接部を押圧する押圧部と、該保持部に対する該当接部の相対変位量を測定する測定部と、を備えることを特徴とするストローク測定装置。前記駆動力を受けずかつ前記押圧部で押圧されたときの前記当接部の位置を基準として、該駆動力を受けかつ該押圧から解放されたときの該当接部の変位量を測定することが好ましい。
(もっと読む)
磁気軸受装置の変位検出装置
【課題】 回転体のラジアル制御軸方向およびアキシアル制御軸方向の変位を正確に検出することができ、しかも、変位センサユニットの構造が簡単で、部品点数が少なくてすみ、製作が容易で、コストダウンが可能な磁気軸受装置の変位検出装置を提供する。
【解決手段】 2組の変位センサユニット6,7のそれぞれが、回転体1のターゲット部15,17の片側の縁部に対向するとともに2つのラジアル制御軸上に位置するように周方向に等間隔をおいて配置された4個の変位センサ16a,16b,16c,16d,18a,18b,18c,18dを備えている。変位演算手段が、8個の変位センサの出力を用いて所定の演算を行うことにより、一方の変位センサユニット6の部分における2つのラジアル制御軸方向の回転体1の変位、他方の変位センサユニット7の部分における2つのラジアル制御軸方向の回転体1の変位、および回転体1のアキシアル制御軸方向の変位を求めるものである。
(もっと読む)
駆動装置
【課題】 移動体の位置検出ポイントが広い間隔をあけて複数存在する場合でも、移動体を高い精度で位置決めすることができる駆動装置を提供する。
【解決手段】 磁界を発生させる磁界発生部材7と、磁界を検出する第1,第2,第3の磁界検出素子6A,6B,6Cから成る磁界検出手段6と、磁界発生部材7を移動させる圧電アクチュエータPとを備える。磁界検出手段6での検出結果に基づいて磁界発生部材7と磁界検出手段6との相対的な位置決めを行う際、磁界発生部材7が移動する可動範囲において、所定領域では第1,第2の磁界検出素子6A,6Bの検出結果に基づいて第1の位置決めを行い、所定領域から離れた所定ポイントでは第3の磁界検出素子6Cの検出結果に基づいて第2の位置決めを行う。
(もっと読む)
障害物位置検知システム
【目的】 小さい消費電力で簡易かつ正確に障害物の位置を検出する。
【構成】 障害物8に対して光線を照射する照射器Eと、障害物からの反射光を受ける受光器Rとを備えた距離測定装置1と、測定した距離を突出位置が変化する検知部材13により感知できる距離感知装置2から構成され、検知部材13の突出位置を使用者の指で検知することにより消費電力が少なく正確に障害物8の位置を検出できる。
(もっと読む)
サードレール測定器
【課題】無理な体勢をとらずに測定可能であって、測定作業に熟練を要さず、誰でも測定が可能なサードレール測定器を提供すること。
【解決手段】電車の走行レールRと平行に設けられた集電用のサードレールT、及びサードレールTの少なくとも上方に配位された防護板Pの、走行レールRに対する位置関係を測定するためのサードレール測定器であって、走行レールR上に配位される支持部材1と測定部とが備えられたものであり、測定部は、支持部材1に対して移動可能であって、サードレールTと防護板Pとの少なくとも一方に一部を当接させることのできる当接部材31,41aと、測定値を表示できる測定値表示部32,41bとが備えられたものであり、上記の測定値表示部32,41bが、上記の支持部材1が走行レールR上に配位された際において、防護板Pよりも走行レール寄りの位置に配位されることを特徴とするサードレール測定器を提供する。
(もっと読む)
スピンドルの制動装置および測定器
【課題】スピンドルの操作性および耐久性を向上させることのできるスピンドルの制動装置および測定器を提供すること。
【解決手段】制動装置600は、スピンドル300が移動するシリンダ610と、このシリンダ610内を2つに区画するピストン620と、スピンドル300とピストン620とを、軸方向および軸直交方向に対し一定のクリアランス633を介して連結する連動手段660と備え、連動手段660は、ピストン620に形成された中空室623と、スピンドル300の他端に設けられ、他端側が中空室623内に係合収納される係合部630とを含み構成され、スピンドル300が一端側へ移動する際には、係合部630が中空室623の一端側内壁に当接し、かつ、他端側へ移動する際には、係合部630が中空室623の他端側内壁に当接するように形成されている。
(もっと読む)
位置測定装置の機能テストを実施する方法およびこの方法を実施するための位置測定装置
【課題】 本発明の課題は、測定尺を監視する際に、位置検出ユニットを用いて位置の値を作る位置測定装置の機能をテストする方法をさらに改善することである。
【解決手段】 補正値(Npv1,Npv2)が、位置測定装置(1)において二つの異なるメモリアドレス下でメモリされていることと、 位置測定装置(1)が、制御値と所属する位置の値の間の一定の数学的関係を形成するために、一方のメモリアドレス下の補正値(Npv1)までアクセスし、評価ユニット(3)が、制御値と所属する位置の値の間の数学的関係の存在をテストする際に、もう一方のメモリアドレス下の補正値(Npv2)までアクセスすることにより解決される。
(もっと読む)
位置測定装置のための連行部材
【課題】位置測定装置の連行部材と封隙手段との間の摩擦を低減する。
【解決手段】連行部材5の結合部分50の滑動を可能とするために、封隙手段7、8で接触状態にある側面50a、50bに沿って、a−C:H:Meタイプの、金属を含有しているアモルファスの炭素被膜Sを備えており、その際、「a」がアモルファスを、および、「Me」が金属、特にタングステン、モリブデン、チタン、またはタンタルを代表している。
(もっと読む)
ワークの位置決め具及びその位置決め方法
【課題】 構造を簡易にして、測定精度を向上させるワークの位置決め具及びその位置決め方法を提供する。
【解決手段】 測定台上に配置された6個の位相ガイド7に、内周面の6個の縦ボール溝10のそれぞれを嵌合させてセットされたワーク10の上端部W1に、内側クランパー61を装着する。次に、クランパー11が内側クランパー61に挿入されると、クランパー11の傾斜部62が、内側クランパー61のピン64に当接しながら下降するため、ピン64が周方向にスライドすると共に、内側クランパー61及びワークWが回転する。そして、各縦ボール溝10の一端が対応する位相ガイド7の一端に接触して、ワークWが周方向に位置決めされて固定されるので、測定中にワークWが周方向に揺動することなく、測定精度を向上させることができる。
(もっと読む)
画像形成装置
【課題】 記録材の厚さを検出する装置を用いて、記録材の先端、後端、重送、重送発生時における画像形成対象の記録材位置を検出する。
【解決手段】 記録材を給紙する給紙手段と、給紙された記録材を搬送する搬送手段と、搬送された記録材の厚さを検出する検出手段と、前記記録材厚さ検出手段により検出した記録材の厚さに基づき画像形成条件を設定する設定手段と、副走査基準信号を生成する手段によって構成される。
(もっと読む)
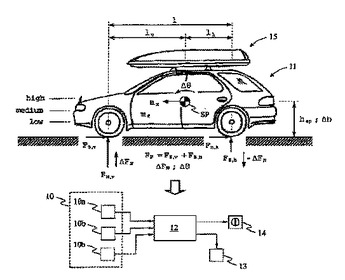
車両の重心の高さを決定する装置及び方法
本発明は、車両の重心の高さを決定するための装置及び方法に関する。この装置は、車両(11)の動力学的なピッチング特性を表す動力学的ピッチングパラメータ(ΔFN、Δθ)を決定する決定装置(10)と、車両(11)の重心の高さを表す重心高さパラメータ(hsp、Δh)を計算するために、決定された動力学的ピッチングパラメータ(ΔFN、Δθ)が供給される分析ユニット(12)とを含む。本発明によれば、決定装置(10)が、さらに、車両(11)の少なくとも1つの車輪に生じる車輪力(FB,v、FB,h)を表す車輪力パラメータ(FB)を決定し、かつ、分析ユニット(12)が、決定された車輪力パラメータ(FB)を考慮しながら、重心高さパラメータ(hsp、Δh)を、決定された動力学的ピッチングパラメータ(ΔFN、Δθ)の関数として計算する。
 (もっと読む)
(もっと読む)
121 - 140 / 162
[ Back to top ]