
Fターム[2F069AA02]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 1次元 (162)
Fターム[2F069AA02]に分類される特許
41 - 60 / 162
中空長尺体湾曲測定装置
【課題】簡易な装置で電柱等の中空長尺体の湾曲度合いを測定でき、また、大がかりな設備の設置を必要とせず、中空長尺体の設置場所に拘わらず湾曲度合いを容易に測定することが可能な中空長尺体湾曲測定装置を提供する。
【解決手段】電柱1の頂部内側又は電柱内部の頂部近傍に当該電柱1の頂部1aにおける軸心に沿った下方向での湾曲状態を非接触にて検知する手段を設ける。この手段は、電柱1の頂部1aにおける軸心αに沿った下方向の距離を測定する測距センサ5で構成するようにしても、電柱1の頂部1aにおける軸心αに沿った下方向を撮影するカメラで構成するようにしてもよい。
(もっと読む)
長距離構造物の位置管理装置、その位置管理システムおよびその位置管理プログラム

【課題】パイプラインのような長距離構造物の保守管理を行うための技術を提供する。
【解決手段】パイプが連結されて構成されるパイプラインにおいて、パイプが掘り起こされて、そのパイプの両端の位置(更新点C1,D1)が計測される。そして、図5(a)に示すように、計測された位置が計測前の位置(対応点C’,D’)と異なっていたとする。この場合、図5(b)に示すように、まず、平面形状については、更新前図形の形状の特徴を保持したまま、相似な図形となるようにして、更新図形を作成する。次に、更新点C1−D1間の実測距離が更新図形に反映されるようにするために、図5(c)に示すように、深さ・高さ方向を変更して、図形上の距離と実測距離とが整合される。そのため、腐食等の位置を、パイプラインの開始点からの累積距離によって管理することが可能となる。
(もっと読む)
成型ドラム上のタイヤ構成部材の検査方法及び装置
【課題】 生タイヤの生産を停止させずに成型ドラム上のタイヤ構成部材を検査すること、及び検査した部材とそれを成型した生タイヤとを対応させることを可能にする。
【解決手段】 成型ドラム4にタイヤ構成部材5を貼り付けた後、成型者がジョイント合わせ等を行っている機械の待ち時間に、点観測式レーザ変位計1により、タイヤ構成部材5の表面迄の距離を測定する。その測定データと、予め測定しておいた成型ドラム4の表面迄の距離の測定データを基に、タイヤ構成部材5の断面形状データ及び貼り付け位置データを求める。求めたデータを、そのタイヤ構成部材5を用いて成型する生タイヤのバーコードとともにデータベース3に保存する。また、求めたデータとマスタデータとを比較処理部9で比較し、差が所定の閾値を越えた場合、比較結果出力部10でアラームを出力する。
(もっと読む)
保持装置
【課題】ダイヤルを何回転も回すことなくワンタッチで保持具を操作できるようにすると共に、作業環境の悪い場所であっても該保持具により測長装置を支持体に容易に固定できるようにする。
【解決手段】支持体2に設置された測長装置の両側を保持して該測長装置を固定する保持具1A、1Bを備える。これらの保持具1A、1Bは、レバー1bの回動と共に回動して本体1aと協働して支持体2を挟んで締め付ける脚部1dを有する。この脚部1dは、本体1aと協働して支持体2を挟んで締め付ける第1の位置に回動する。また、支持体2と隙間を有してスライドの方向に測長装置を移送する第2の位置に回動する。また、支持体2の幅に対して該脚部1dの幅が狭くなって保持具1A、1Bを支持体2から取り外す第3の位置に回動する。この構成によって、何回転もダイヤルを回すことなく、ワンタッチで保持具1A、1Bを支持体2に固定、解除及び乖離できる。
(もっと読む)
電子機器
【課題】衝撃による電子機器の損傷を正確に検出して、衝撃による弊害を理想的な状態で防止する。
【解決手段】電子機器は、加速度を検出する加速度センサ8と、この加速度センサ8で検出する加速度から落下高さを演算する演算回路52とを備えている。演算回路52は、加速度センサ8から入力される加速度信号を演算して落下高さを検出し、落下高さから落下の程度を判定している。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
平坦度測定方法および平坦度測定装置
【課題】各種装置におけるステージなどが有する平面の平坦度を、容易かつ高精度に測定する技術を提供することを目的とする。
【解決手段】板状部材2をステージ1の載置面10の第1位置POS1に載置したときと、第2位置POS2に載置したときとにおける、板状部材2表面の高さ位置をそれぞれ測定する。次に、測定地点(X1,Yi)における測定結果D1(=A(i)+B(i))と、測定地点(X1,Yi-1)における測定結果D2(=A(i)+B(i-1))の差分をとることによって、板状部材2の厚み成分を相殺し、測定地点(X1,Yi)および(X1,Yi-1)間の載置面10の高さの変化量(=B(i)−B(i-1))を算出する。そして、これらの差分演算処理結果を累積加算することによって、各位置における載置面10の基準高さ位置からの変位量を算出できる。
(もっと読む)
変状計測装置
【課題】従来の光式変位センサや電気式変位センサ(伸縮センサ)を用いて、これらの伸縮計の機構を変えることなく低コストかつ簡便な機構と1台の一軸方向検出変位センサで2区間の変位を計測し、また、少ない台数で多数区間の変位箇所を特定する面的変状計測装置を提供する。
【解決手段】2つの移動杭の変位状態を計測する装置において、固定杭に固定された一軸方向検出変位センサと、同変位センサに繋がれた接続線と同接続線の一端に設けた変位伝達機構と、両端がそれぞれ前記各移動杭に連結され中途が前記の変位伝達機構に揺動もしくは摺動自在に張設され且つ移動杭の変位に追従して非伸縮状態で全体移動自在に張設された計測線とから構成されたことを特徴とする。
(もっと読む)
基準尺を挟持して固定するための装置
位置測定装置の基準尺(2)は、挟持部材(1)を用いて支持体(3)上に固定されている。挟持部材(1)は、第一の挟持力(F1)で基準尺(2)を取付面(31)上に押し付ける第一のスプリングアーム部(11)を有する。挟持部材(1)は、取付面(31)に対して垂直な方向に延びるストッパ面(32)上に第二の挟持力(F2)で基準尺(2)を押し付ける第二のスプリングアーム部(12)を有する。挟持部材(1)を支持体(3)上に固定することによって、第一の挟持力(F1)と第二の挟持力(F2)が一緒に生み出されている。 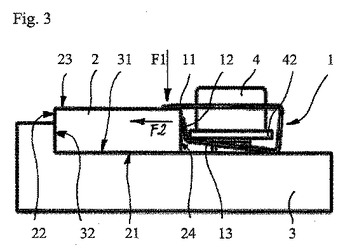 (もっと読む)
(もっと読む)
軌道狂い検測装置
【課題】波形ひずみを生じることなく、様々な弦長の正矢波形をリアルタイムに出力される軌道狂い検測技術を提供すること。
【解決手段】車両の水平方向の加速度を2階積分することで通り狂い量としての車両の水平方向の位置を算出する際に、車両の走行速度に応じてベッセルフィルタのゲインおよび遮断周波数を調整し、調整後のベッセルフィルタは、車両の水平方向の加速度の位相特性を変化させないので、波形ひずみを生じることがない。また、車両の鉛直方向の加速度を2階積分することで高低狂い量としての車両の鉛直方向の位置を算出する際に、車両の走行速度に応じてベッセルフィルタのゲインおよび遮断周波数を調整し、調整後のベッセルフィルタは、車両の鉛直方向の加速度の位相特性を変化させないので、波形ひずみを生じることがなく、様々な弦長の正矢波形をリアルタイムに出力することができる。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
灰溶融炉のレベル測定方法及びレベル測定装置
【課題】 イニシャルコストやランニングコストを削減できると共に、現場での作業を減らす。
【解決手段】 炉本体3の天井壁に昇降自在に設けた主電極4先端から炉本体3内に不活性ガスGを供給しつつ、炉本体3内の被溶融物を溶融して炉本体3内に溶融メタル層M及び溶融スラグ層Sを形成する灰溶融炉2に於いて、主電極4を降下させながら炉本体3内に供給している不活性ガスGの背圧を測定し、背圧の増加率の変化から主電極4の先端が溶融スラグ面及び溶融メタル面にあるときの主電極4の位置を検出すると共に、溶融スラグ面及び溶融メタル面の検出時に於ける主電極4の位置から溶融スラグ層Sの厚みL1を算出し、又、炉本体3に設けた非接触式の距離計14により当該距離計14から溶融スラグ面までの距離L3を測定し、前記溶融スラグ層Sの厚みL1と測定距離L3とから溶融メタル層Mの厚みL2つまり溶融メタルレベルMLを算出する。
(もっと読む)
軌道狂い検測装置および軌道狂い検測方法
【課題】演算負荷が増大せず、且つ低速域でも所望の波長帯域が得られる軌道狂い検測技術を提供すること。
【解決手段】車両の水平方向の加速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の加速度を順次加算して車両の水平方向の速度とする。続いて、演算後の車両の水平方向の速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の速度を順次加算して車両の水平方向の位置とし、サンプリング時間に基づく係数を乗算した後に別途測定した加速度計とレールとの間の相対変位を加算して通り狂い量とする。同様に、車両の水平方向の加速度から高低狂い量を算出する。また、等時間サンプリングの代わりに等距離サンプリングでも本方法で軌道狂いを計算できる。
(もっと読む)
真直度測定装置
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
台車の車輪軸受部の異常判定方法
【課題】簡便でしかも車輪軸受部の異常を高い精度で検出し判定するための台車の車輪軸受部の異常判定方法を提案する。
【解決手段】
軌道上を走行する連結式台車の車輪軸受部の異常を判定するに当たり、該台車の車輪外側面の上輪部および下輪部に面して配設された一対の距離センサと、車輪の車軸レベルの高さに配置された車輪検知センサと、車輪を特定するための車輪認識スイッチとを使って、車輪検知センサによる車輪認識と同時に距離センサによる車輪位置測定とを内輪、外輪についてそれぞれ行うことにより、距離センサによる車輪位置測定値に基づいて、個々の車輪の傾きおよび車軸方向の平均位置ずれ量を求めて、車輪軸受部に異常を検知した場合に警報を出す方法。
(もっと読む)
樹脂押出用口金装置及び樹脂シートの製造方法
【課題】吐出口から吐出される樹脂材料のシート厚を正確に制御すること。
【解決手段】互いにリップ面11を対向させた状態で接続した一対のリップ10と、リップ面11の相互間距離を調整する調整手段20とを具備し、リップ面11の相互間に構成されるスリット状の吐出口12から樹脂材料を吐出する樹脂押出用口金装置において、吐出口12の外部においてリップ面11に平行となる態様でリップ10に設けた測定面13と、測定面13に対向する態様でリップ10に保持され、予め設定した計測基準から測定面13までの距離を計測する変位センサ30とを備えている。
(もっと読む)
水中距離測定方法および水中距離測定システム
【課題】水中での測定における特殊な条件に影響を受けることなく、高精度に水中の2点間距離を測定することを可能とした水中距離測定方法および水中距離測定システムを提案する。
【解決手段】大気中でPC鋼線10に張力を与え、このPC鋼線10に目盛を付すとともに、基準鋼線温度を測定する工程と、PC鋼線10を、水中に設けられた2つの測定点P1,P2の直上を通るように水中に配設する工程と、PC鋼線10に張力を与えて目盛と測定点P1,P2との位置関係により測定点P1と測定点P2との水中距離Lを測定するとともにPC鋼線の鋼線温度を測定する工程と、基準鋼線温度と水中での鋼線温度との差により、水中距離Lの補正を行う工程と、を備える水中距離測定方法およびこれに使用する水中距離測定システム。
(もっと読む)
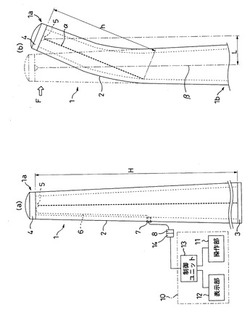
距離測定装置
【課題】
できるだけ長期間にわたって測定精度および信頼性が保証されている、高い測定精度を有するカプセル封入されたコンパクトな距離測定装置を提供する。
【解決手段】
測定方向Xに沿って延びる管(24)であって、該管が、前記縦ガイド(12)によって測定方向Xに平行に案内されるように前記第2の測定素子(20)に接続されており、前記ハウジング(11)の開口部(25)を通して封止するように引き出されており、前記連結ロッド(22、22.1、22.2、22.3)が前記管(24)の内部に延び、前記管(24)が、前記管(24)の内部における、前記測定方向Xに直交して進行する前記連結ロッド(22、22.1、22.2、22.3)の補正移動を可能にする管(24)を備えていることにより解決される。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
41 - 60 / 162
[ Back to top ]