
Fターム[2F069AA02]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 1次元 (162)
Fターム[2F069AA02]に分類される特許
21 - 40 / 162
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
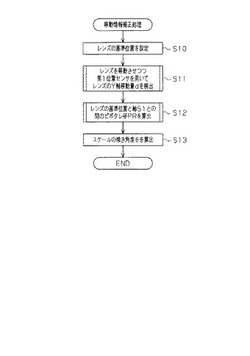
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
回転軸の測定装置

【課題】2つのセンサを設けずにクラッチを組み付けた状態で駆動軸と被駆動軸の芯ずれを測定することができるとともに、作業性を向上することができる回転軸の測定装置を提供する。
【解決手段】回転軸の測定装置10は、駆動軸と被駆動軸の芯ずれをフライホイール61上で測定するセンサヘッド20と、センサヘッド20の測定データを処理するデータ処理装置40と、を備え、センサヘッド20は、被駆動軸に設けられたスプライン軸部の外周の周方向変位を検出する平面コイルを有する変位センサ21を備え、変位センサ21は、平面コイルからスプライン軸部の外周までの距離に起因する第1信号成分と、スプライン軸部の外周の凹凸形状に起因する第2信号成分とが重畳された電気信号を出力し、データ処理装置40は、第1信号成分および第2信号成分に基づいて芯ずれ量および芯ずれ位相の情報を取得する構成を有する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
コークス炉の移動機の位置検出装置及び位置検出方法
【課題】コークス炉の移動機の現在位置を正確且つ安価に検出できる位置検出装置及び位置検出方法を提供する。
【解決手段】位置検出装置は、レール31〜35に接し移動機21〜25の移動に伴って回転するローラ42の絶対的な回転角度を測定するアブソリュート回転角度検出装置41を備え、移動機21〜25の現在位置を示す位置情報を出力する位置情報出力手段と、位置情報出力手段により出力された移動機21〜25の位置情報の誤差を修正する誤差修正手段と、を備える。誤差修正手段は、コークス炉10に設置された基準標識51と、移動機21〜25に搭載され基準標識51を検出する非接触式センサ52と、非接触式センサ52により基準標識51を検出した場合には、その時点において位置情報出力手段から出力された移動機21〜25の位置情報を、基準標識51に予め付与された基準位置情報に置換する位置情報置換手段と、を備える。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
内面検査装置とこれを備える内面加工検査装置
【課題】切削加工後の長尺シャフトなどの管状部材の内面を簡単に検査できる内面検査装置を提供する。
【解決手段】管状部材1の内面2を加工する内面検査装置であって、管状部材1を固定する固定装置10と、固定装置10により固定された管状部材1の内面2を加工する加工機20、30、40と、内面2に区画された管状部材の内部空間に位置した状態で、加工機に加工された内面2を検知する内面検査ヘッド15と、を備える。
(もっと読む)
変位計測装置
【課題】回転によって変位する被測定物の初期位置から計測方向への変位を正確に計測することができる変位計測装置を提供する。
【解決手段】被測定物に設けられ、初期位置において基準面と平行な延在方向に延びるように形成されたターゲット2と、センサ本体を備えかつターゲット2とセンサ本体との計測方向の距離を計測するセンサ部と、センサ部からの出力に基づいて被測定物の計測方向の変位を算出する演算部と、を有し、ターゲット2のセンサ本体に対向する計測面2aには、ターゲット2の回転による計測方向の変位誤差δを補償する補償面2cが形成されていることを特徴とする。
(もっと読む)
軌道鉛直変位計および軌道鉛直変位計測方法
【課題】
軌条の挙動特に鉛直方向変位の計測は安全管理面から極めて重要であるにもかかわらず直接的に計測することは振動、衝撃等の影響から一般的には行なわれていないのが現状である。
【解決手段】
(1)電解液傾斜受感素子を内蔵し、取付面部とスペース部材を有した軌道鉛直変位計を提供する。
(2)前記軌道鉛直変位計を軌条の一定区間毎に複数設け、これら出力を鉛直方向変位量に変換するようにした軌道鉛直変位計測方法を提供する。
(もっと読む)
特定部位検出方法、及び該方法を用いた試料分析装置
【課題】従来のデジタル画像相関法では負荷試験前後の試料上の同一点を探索するために輝度画像上で識別可能な模様が必要であり、こうした模様がない場合にはマーキングを行う必要があった。本発明ではこうしたマーキングを行うことなく高い精度での同一点探索を行えるようにする。
【解決手段】金属試料片では表面の平滑化処理を行っても、微細で且つ試料毎及び部位毎に相違する凹凸プロファイルが存在する。そこで、負荷試験前の試料の凹凸プロファイル(基準高さ分布)と負荷試験後の試料の凹凸プロファイル(比較対象高さ分布)とを用い(S1、S2)、デジタル画像相関法と同様の手法により相関係数の分布を求め(S3〜S8)、最大の相関係数を与える位置が同一点であるとして(S9、S10)、負荷試験前の試料上の注目点に対応する負荷試験後の試料上の点を求める。
(もっと読む)
閉水路変位計
【課題】
不動点間に気中にて基準線を張架して、これを基準として変位を計測することが一般的に行われているが、基準線の揺動、温度変化による伸縮変化が著しく、計測精度が損なわれるという問題があった。
【解決手段】
本発明によれば、不動点間に液体を満に貯留してその中間部に変位計測部位を有する液路を設け、この液路内に線状部材を張架して、変位計測部位に取付けた非接触変位センサにより線状部材との間隙を測定するようにした。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】エンジンやボデーにたわみ等の変形が生じた場合であっても、エンジンマウントの変位量をグローバル座標系において算出することができ、さらに、車両の進行方向等を考慮した車両座標系に対する変位量をも算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、センサ座標系におけるエンジンマウント10の変位量を計測する変位量計測工程と、重力作用方向及び東西南北方向を計測することでグローバル座標系を設定するグローバル座標系設定工程と、センサ座標系のグローバル座標系に対する姿勢角を算出する姿勢角算出工程と、姿勢角算出工程で算出した姿勢角に基づいて、変位量計測工程で計測したエンジンマウント10の変位量を前記グローバル座標系における変位量に変換するグローバル座標系変換工程と、を備える。
(もっと読む)
形状測定装置
【課題】被測定物体の形状を高精度に測定することができる形状測定装置を提供する。
【解決手段】形状測定装置100を、被測定物体15の形状を測定して検出値を出力するプローブ12と、所定の空間内でプローブ12を移動可能に保持する保持機構部(アーム部11)と、プローブ12を移動させて、プローブ12により検出された被測定物体15の検出値及びアーム部11の位置情報から測定値を算出する制御部20と、互いの距離の真値が既知の複数の基準器31と、基準器31間の距離をプローブ12で測定し、基準器31間の距離の測定値と基準器31間の距離の真値とから、この測定値が真値に一致するように補正する演算部32と、から構成する。
(もっと読む)
操作性や使い勝手の良いマイクロメータ装置
【課題】操作性や使い勝手に優れたマイクロメータ装置を提供する。
【解決手段】測定子9を用いて微少変位を測定するマイクロメータ装置28において液晶表示装置又は有機EL表示装置からなる表示装置22に操作プログラムや測定結果を分り易く表示し、また独立な機能をもつ多数のキーからなる操作パネル24を備えることで入力操作が簡単に行える。更にマイクロメータ装置を何台並べる多連測定において測定条件が同一の場合、測定条件転送手段20により1台目29の測定条件を2台目以降28,30に一括に転送することで各本体の測定条件の入力が効率的になる。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
ディスクブレーキのピストン変位量測定方法およびその方法に使用する装置
【課題】ロータの両側にピストンを有するピストン対向型ディスクブレーキであっても、正確なピストン変位量を測定可能とする装置を提供する。
【解決手段】ディスクロータを跨いで配置するディスクブレーキのキャリパに、対向する少なくとも1個のシリンダを設け、前記各シリンダに挿入したピストンで摩擦パッドを両側から押圧して前記ディスクロータに摺接しブレーキを働かせるようにしたディスクブレーキにおいて、前記ピストンまたはディスクロータの一方にギャップセンサを設け、そのセンサによりディスクロータまたはピストンとの距離を計測し、ピストンの軸方向の変位量を測定することを特徴とするピストン変位測定方法である。
(もっと読む)
往復動内燃機関作動のための検出装置及び方法、並びに往復動内燃機関
【課題】改良型の往復動内燃機関と、特に往復動内燃機関の作動のための、特にシリンダ滑り面潤滑のための改良潤滑装置及び改良潤滑方法とを提案し、それにより、従来の問題を解決し、かつ往復動内燃機関の作動時の種々の構成要素又は過程の制御及び/又は調整を改善し、特に、シリンダ内への潤滑油供給の最適時点を決定する。
【解決手段】検出装置が、制御ユニット81を有するセンサ装置8を含み、制御ユニット81が、配量装置6と位置センサ82とに信号接続をされ、位置センサ82が作動時にシリンダ4の内室43と測定技術的に連絡することで、作動時にシリンダ4の軸線方向Aでのピストン5の位置Xが位置センサ82によって検出可能であり、往復動内燃機関が、ピストン5の位置Xに応じて制御可能及び/又は調整可能である。
(もっと読む)
表裏面測定プローブ、表裏面測定装置および表裏面測定方法
【課題】被測定物の表裏面形状にかかわらず、1つのプローブで被測定物の表裏面を高精度に測定できる表裏面測定プローブ、表裏面測定装置および表裏面測定方法を提供する。
【解決手段】プローブ本体10と、両端に接触子22,23を有する検出軸20と、この検出軸20をプローブ本体10に対して検出軸20の軸方向へ移動可能に支持するガイド機構30と、検出軸20を軸方向へ移動させる駆動機構40と、検出軸20と同軸上において、検出軸20の移動位置を検出する位置検出手段50とを備える表裏面測定プローブ。
(もっと読む)
21 - 40 / 162
[ Back to top ]