
Fターム[2F069AA02]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 1次元 (162)
Fターム[2F069AA02]に分類される特許
101 - 120 / 162
変位計異常検出装置

【課題】磁気吸引浮上車の浮上制御に用いられる変位計の異常を浮上制御中であっても検出する。
【解決手段】複数の変位計が備わる複数の浮上力発生手段を備え、変位計41aから周期的に検出信号が出力されることで検出されているレール継目110が検出されなくなることにより、この変位計41aに異常が発生しているものと判断する。
(もっと読む)
トロリ線支持点位置検出方法及び検出システム

【課題】トロリ線の支持点位置を正確に且つ簡単に検出できる手段を提供する。
【解決手段】検測車が収集する各種検測データが入力される入力部と、入力部から送られる各種データ及び所要のパラメータファイルに基づきトロリ線の支持点位置検出処理を行う処理部と、処理部の演算結果に基づき支持点位置を出力する出力部とを備える検出システムを構築する。トロリ線偏位の検測値変化曲線Kにおいて支持点位置を含む検出範囲Rを設定し、検出範囲Rの始端側の検測値変化曲線K上の点Sと終端側の点Tとを結ぶ補完直線Lを求める。検測値変化曲線Kと補完直線Lとの軌道中心線Cに対し垂直な方向の距離DPを算出し、この値DPが最大値DUとなる距離程を求める。検測値変化曲線Kは支持点位置で頂点Uを形成するから、距離DPが最大値DUとなる位置の距離程XUとして支持点位置の距離程が求められる。
(もっと読む)
部品の自重を取得して可撓性部品の輪郭のズレを取得する装置およびその方法
部品12を支点8〜11において収容するスタンプ領域6を形成するために、ベース領域1上に配列された複数のスタンプ2〜5を用いて、部品の自重を取得し、可撓性部品12、特に、大面の金属板の、所望の輪郭と実際の輪郭との間のズレを取得するための方法および装置であり、各スタンプ2〜5は、支点において作用する重量(力)Fmを測定するための少なくとも1つの力測定センサ18〜21と、各スタンプ2〜5によって移動された移動経路Smを測定するための少なくとも1つの距離測定センサ(14−17)と備える。 (もっと読む)
空間内の対象物の位置を測定かつ/または較正するための方法および装置
本発明は、空間内の対象物の位置を測定かつ/または較正する方法およびそのための装置に関し、そのような実施形態においては、装置は、一端においてフレームに嵌合され、他端においてプラットフォームに嵌合された、少なくとも1つの移動アームを含み、プラットフォームは、測定または較正される対象物に取り付けられることができ、プラットフォームを取り付けられた対象物が動いている間に、少なくとも1つの移動アームの個々の部材、フレームおよびプラットフォームの相対的な位置が読み取られ、測定されたデータは、対象物の位置を決定するために、または対象物を較正するために使用される。測定および/または較正装置のプラットフォームを測定または較正対象物に取り付けると直ちに、これらの接合された部分は、対象物の駆動装置によって起動され、対象物の作動空間の範囲内で任意の動きを行い、その一方で、装置の個々の部材の相対的な位置に対応する量が収集され、空間内の対象物の位置の決定または較正のために使用される。測定または較正対象物を有するプラットフォームが動いている間に測定された量の数は、装置の自由度の数より少なくとも1大きい。 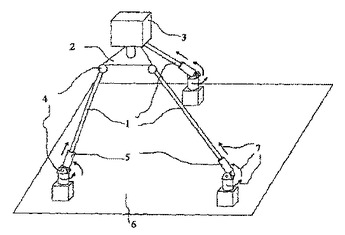 (もっと読む)
(もっと読む)
転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法
【課題】対になった位置検出器同士の平均値をそれぞれ求めて位置検出器の異常を判定すると共に異常の位置検出器を除外し適正な平均値を用いて位置修正操作を行う転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法を提供する。
【解決手段】各対となる位置検出器の信号出力から平均値1及び平均値2を第1及び第2の平均値演算器21、22により求める。検出器誤差監視手段27はこれらの平均値の差を求める。異常判別手段28はこの平均値の差がある定数以上であれば位置検出器の異常を判定する。異常と判定した場合にはオペレータが関与するスイッチ制御手段30に出力する。スイッチ制御手段30は、位置修正が必要な位置検出器に係る位置修正演算器HhnのスイッチのみONし、位置修正演算した出力を平均値演算器21又は22のいずれかに出力する。
(もっと読む)
位置決めシステム
【課題】可動型ポジショナーのための位置決めシステムとして、機械的に複雑でなくてもポジショナーに高い位置決め精度を可能とし、フレキシブルにさまざまな用途に適するようなものを得ること。
【解決手段】
ポジショナーを位置決めする位置決めシステムが、ポジショナー(10)を駆動するモーター(18)と、測定装置とを備え、この測定装置は、モーター(18)を制御するためポジショナーの調整トラベルを直接測定する。このため牽引ワイヤ(32)がポジショナーと結合され、ドラム(36)に巻き取られる。ポジショナーの調整トラベルを測定するため、シャフトエンコーダー(42)を用いて、ドラム(36)の回転を測定する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
圧電体薄膜の評価方法
【課題】測定誤差の少ない圧電体薄膜の変位量を得ることができる圧電体薄膜の評価方法を提供する。
【解決手段】圧電体薄膜31の評価方法は、まず、圧電体薄膜31を含む試料12を試料固定治具20に固定する。試料12には、圧電体薄膜31に電圧を印加するために圧電体薄膜31を挟むように、第1電極42と第2電極43とが形成されている。次に、探針33を圧電体薄膜31の電界方向に対して交差する方向にある測定面に直接接触させる。そのあと、圧電体薄膜31に電圧を印加しながら、探針33を測定領域に直接走査させることにより、圧電体薄膜31の圧電特性(第1変位量)を測定する。
(もっと読む)
可動機構の位置を示すシステムおよび方法
【課題】 駆動ベルトを位置エンコーダとして用いる方法および装置を開示する。
【解決手段】 位置制御装置は機構に接合されたベルトを備え、ベルトは機械可読位置指標を有し、機構を運搬する。位置制御方法は、機構を運搬するベルトから位置指標を読み取ることと、位置指標を用いて機構の位置を特定することとを含む。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】変位測定系を用いて基板テーブルの位置を高精度に測定する。
【解決手段】変位測定系1は、第1の方向における基板テーブル2の位置を測定するように構成された第1のxセンサ4と、第2の方向における基板テーブル2の位置を測定するように構成された第2のyセンサ6とを備える。変位測定系は、さらに第2のxセンサ5を備える。第1および第2のxセンサ4、5と第1および第2のyセンサ6、7は、少なくとも一つの格子プレート3に対するセンサそれぞれの位置を測定するように構成される。変位測定系1は、基板テーブル2の位置に応じて第1および第2のxセンサ4、5と第1および第2のyセンサ6、7を選択的に使用して、三自由度で基板テーブル2の位置を決定するように構成される。
(もっと読む)
複数の設備の相対位置を監視するデバイス
本発明は、相対位置を監視し、かつ/または少なくとも2つのサブ・システムを含むシステムにおける相対位置を測定しかつ評価するデバイスに関する。前記デバイスは、複数の設備(20、30)を備え、その少なくとも一方(20)は、振動隔離器(2、3)が設けられる。本発明のデバイスは、また、設備(20、30)の相対位置を決定するための少なくとも1つの構成部品(9)と、設備(20、30)の測定された相対位置が、公差間隔内にあるかどうかを検査するための解析デバイス(40)とを備える。  (もっと読む)
(もっと読む)
膜厚測定装置
【課題】 簡易な構成で、精度良く膜厚測定可能な膜厚測定装置を提供する。
【解決手段】 膜厚センサ20によって測定されたベルト12の膜厚測定結果について、シャフト変位量測定用センサ16、及びシャフト変位量測定用センサ18の検知信号に基づいてもとめたシャフト14の長手方向の水平方向に対するゆがみに基づいてゼロ点補正を行う。 また膜厚センサ20によって測定されたベルト12の膜厚測定結果について、膜厚測定装置内10の環境温度に応じた基準環境温度に対する膜厚変動値に基づいて補正を行うことができるので、環境温度の変動による膜厚測定センサ20の測定結果の変動を抑制することができ、精度良く膜厚を測定することができる。
(もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
ワイヤ位置検出方法及びその装置
【課題】 低コストな装置でシート状部材の幅方向両端のワイヤの位置をそれぞれ検出することができ、シート状部材の幅方向両端のワイヤ間の長さを正確に求めることのできるワイヤ位置検出方法及びその装置を提供する。
【解決手段】 電磁ピックアップセンサ130がシート状部材300の幅方向に移動することにより、シート状部材300の表面におけるワイヤ301による前記磁気の変化を検出し、電磁ピックアップセンサ130から出力される電圧信号を整流して平滑化し、平滑化した電圧信号を検出したときの電磁ピックアップセンサ130の位置と、平滑化した電圧信号を検出しなくなったときの電磁ピックアップセンサ130の位置に基づいてシート状部材300の幅方向両端のワイヤ301の位置をそれぞれ検出する。
(もっと読む)
ワイヤ位置検出方法及びその装置
【課題】 シート状部材を切断しながらシート状部材の幅方向両端のワイヤの位置をそれぞれ検出することにより、切断面における両端のワイヤ間の長さを正確に求めることができるワイヤ位置検出方法及びその装置を提供する。
【解決手段】 磁性体のカッター130とそのカッター130からワイヤ301の長手方向に所定距離だけ離れた位置との間の磁気抵抗をカッター130とともに移動する磁気抵抗検出器140によって検出し、ワイヤ301と接触していないカッター130がワイヤ301と接触することにより磁気抵抗が変化したときのカッター130の位置と、ワイヤ301と接触しているカッター130がワイヤ301と接触しなくなることにより磁気抵抗が変化したときのカッター130の位置に基づいてシート状部材300の幅方向両端のワイヤ301の位置をそれぞれ検出する。
(もっと読む)
たわみの測定方法および装置
【課題】 構造物や構造部材のたわみを簡便に測定する測定方法および装置を提供する。
【解決手段】 複数の支柱2、3を被測定物1上に立設し、これら支柱間に基準となる測定用線材6を水平もしくは垂直または被測定物と平行に張設し、支柱間の測定位置に測定器具10を立設し、この測定器具に設けられたマイクロメータ12により光センサ部13を上下させ、このセンサ部が測定用線材を検出したときの測定用線材の高さをマイクロメータにて計測し、マイクロメータによる計測高さと予め求められている前記測定用線材の基準高さとの差を求めることにより被測定物のたわみを測定する。
(もっと読む)
媒体内に閉じ込められた対象物の位置探査用測定方法及び測定装置
本発明は、少なくとも1つの容量性高周波センサ(60)を用いて、第1の高周波検出信号を形成し、該第1の高周波検出信号は、検査すべき前記媒体に作用を及ぼし、従って、第1の高周波検出信号の測定及び評価によって、殊に、容量性のセンサ装置(60)のインピーダンス測定によって、媒体内に閉じ込められた対象物についての情報を得ることができる、媒体内に閉じ込められた対象物の位置探査用測定方法に関する。
本発明によると、媒体内に閉じ込められた対象物についての情報を得るために、少なくとも1つの別の第2の検出信号を評価する。
更に、本発明は、本発明の方法による測定装置(62)に関する。 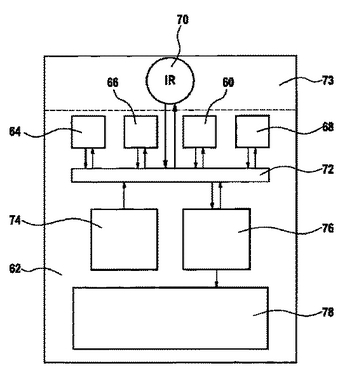 (もっと読む)
(もっと読む)
検出方法、制御方法及び位置合わせ方法
【課題】高精度かつ短時間にウエハの面上の異常を検出する。
【解決手段】パラメータmultiに1がセットされていた場合、所定枚数のウエハWの同一箇所での面位置の計測値の絶対値|Ht(xi,yi)|が閾値以上となると、ウエハWとウエハホルダWHとの間に異物が挟まれていると判断して面異常フラグf[i]をセットし(ステップ404→406→408→410→412)、パラメータmultiに0がセットされていた場合には、ウエハWのある地点(xi,yi)での面位置の計測値の絶対値|Ht(xi,yi)|が閾値以上となると、ウエハWとウエハホルダWHとの間に異物が挟まれていると判断して面異常フラグf[i]をセットする(ステップ404→406→412)。
(もっと読む)
位置決め装置
【課題】 作業効率が高く、構成が簡単な位置決め装置を提供する。
【解決手段】 この位置決め装置では、2つの可動テーブル4,5の移動範囲XA,XBはオーバラップ部XOを有し、2つの可動テーブル4,5のうちのいずれか1つの可動テーブル4または5がオーバラップ部XOに進入したことに応じて、他の可動テーブル5または4がオーバラップ部XOに進入することを禁止する。したがって、可動テーブル4,5がオーバラップ部XOで衝突することを防止することができ、簡単な構成で作業効率の向上を図ることができる。
(もっと読む)
ギア駆動式バランサの検査装置
【課題】 歯面全体にわたってクランクギアとバランサギアの噛合状態を迅速且つ精密に検査すること。
【解決手段】 クランクシャフト3を回転させる駆動機構160と、バランサギア17のクランクギア4との噛み合いを調整する噛合調整機構126を設ける。噛合調整機構126は、当該クランクギア4に従動する従動方向と反従動方向とに択一的に調整する。各シャフト3、17の回転角を検出する回転角度検出手段124、154を設ける。バランサシャフト14の軸方向の移動を検出するスラスト変位量計測手段123を設ける。所定回転数だけバランサギア17のクランクギア4への噛み合いを前記従動方向に調整した後、反従動方向に切り換え、各回転角度検出手段124、154並びにスラスト変位量計測手段123が計測した変位量に基づいて、バランサギア17とクランクギア4のバックラッシュを演算するようにしている。
(もっと読む)
101 - 120 / 162
[ Back to top ]