
Fターム[2F069GG11]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 直接測定 (274)
Fターム[2F069GG11]の下位に属するFターム
Fターム[2F069GG11]に分類される特許
181 - 200 / 200
高速走査用プローブ
座標位置決定装置2のアーム6に取り付くためのハウジング16と、スタイラス支持部材28に取り付けられたスタイラス10とを備える測定プローブ5。
スタイラス10とスタイラス支持部材28は、ハウジング16に関して偏向可能である。第1のトランスデューサシステム40−48は、座標位置決定装置2のアーム6に対するスタイラス支持部材28の移動を測定する。第2のトランスデューサシステム38は、スタイラス支持部材28に対するスタイラスチップ12の移動を測定する。全スタイラス偏向の測定が、第1および第2のトランスデューサシステムからのデータを組合せることにより達成される。  (もっと読む)
(もっと読む)
糸条外径測定方法および装置

【課題】複数の糸条の外径を測定する場合にも、大型の走査機構を必要とせず、安いコストで測定できる測定方法および装置を提供する。
【解決手段】形状測定手段と信号処理手段と走査手段と測定ロールとを用い、測定ロール上にある複数の糸条に対し、走査手段により走査させつつ形状測定手段で所定の糸条の表面形状を測定し、得られた表面形状から信号処理手段により測定ロール表面と糸条頂部を認識し、これらの高さの差から糸条の外径を測定することを特徴とする糸条外径測定方法、および糸条外径測定装置。
(もっと読む)
静圧気体軸受を用いた計測器および支持台

【課題】 ダイヤルゲージ(2)等で水平方向の平滑度を計測する際、又はハイトゲージ等で水平方向のけがきをする際の摩擦および振動で計測精度の低下、作業性の非効率をまねく。そこで、計測動作から生じる定盤との摩擦と振動を抑えることにより、計測過程における精度と、位置決め、搬送の能率につき向上を図る。また、支持したい計測器が重いとき、定盤等との摩擦を抑えることにより、取り扱いなどの作業能率向上と、維持管理の簡便を図る。
【解決手段】静圧気体軸受機構を有する計測器支持台(10)により計測器等を静圧により浮上支持する既存の発明を改良し、計測動作等から生じる摩擦を抑制し、振動を抑え、計測機構への負荷を低減し、作業者への重量面での負担を軽くした。
(もっと読む)
試料傾け補助具
【課題】 本発明は、簡単に大きく傾斜角度を変更できる試料傾け補助具を提供することを目的とする。
【解決手段】 試料の計装時等において、試料を傾けるための試料傾け補助具は、台となるベースと、前記ベースに回転可能に支持された回転体と、前記ベースに移動可能に支持された可動体と、前記可動体を一軸方向に移動させる駆動体とを具備する。前記可動体が移動することにより、前記回転体の前記ベースに対する傾きは変化する。前記可動体の移動方向を前記ベースの表面に平行にした。また、少なくとも前記ベースと前記可動体と前記可動体とは磁性材料により形成されており、前記可動体に磁石を取付ける。
(もっと読む)
走査形プローブ顕微鏡
【課題】本発明が解決しようとする問題点は、走査プローブ顕微鏡で狭域の走査をする場合における、広域走査でのスキャナ駆動回路の持つノイズやドリフトが観察像の質を悪くしていることである。
【解決手段】探針と試料との間に作用する物理量を検出する走査形プローブ顕微鏡において、探針と試料を相対的に走査するスキャナと、前記スキャナの走査領域に対応した少なくとも2個のスキャナ駆動回路と、前記少なくとも2個のスキャナ駆動回路を切り替える切替手段と、を備えた走査形プローブ顕微鏡。
(もっと読む)
3次元形状測定方法及び3次元形状測定装置
【課題】簡易な構成で、迅速に被測定物の表面形状を測定できる3次元形状測定方法等を提供すること。
【解決手段】 被測定物102の表面102aの形状を測定する第1面形状測定ステップと、治具103の回転軸105cに対する位置関係を少なくとも一対の位置検出器A1、B1により検出する第1の位置検出ステップと、被測定物102を反転する被測定物反転ステップと、反転された治具103の回転軸105cに対する位置関係を少なくとも一対の位置検出器A1、B1により検出する第2の位置検出ステップと、第1面形状測定ステップの測定結果を第1の位置検出ステップの検出結果に基づいて座標変換し、第2面形状測定ステップの測定結果を第2の位置検出ステップの検出結果に基づいて座標変換する座標変換ステップとを有する。
(もっと読む)
スライド操作装置
【課題】ミキシングコンソールのフェーダなどのスライドボリューム装置において、スライド操作子への加圧力に対して、磁気式センサ23での検出精度を確保する。
【解決手段】移動ブロック2を、互いに平行な主移動ガイド体11と副移動ガイド体12で摺動自在に保持する。主移動ガイド体11を棒状のステンレスシャフトとする。副移動ガイド12を非磁性ステンレスのシャフト12aと磁性部材12bでインサート成型する。磁気式センサ23で磁性部材12bの磁極パターンを検出する。移動ブロック2の副ガイド孔22の上下方向のクリアランスを主ガイド孔21の上下方向のクリアランスより大きくする。主移動ガイド体11でスライド方向にガイドし、副移動ガイド体12で移動ブロック2の横揺れを防止する。
(もっと読む)
間口の寸法測定装置および方法
【課題】 経験や熟練を要することなく、間口の寸法および柱の傾きや鴨居の傾斜・撓みなどの形状を測定する装置を提供すること。
【解決手段】 立設した柱21を有する架台2と、この架台2の柱21に取り付けられる寸法測定装置本体1とを具備し、この寸法測定装置本体1は、柱21に取り付けられる基台26と、この基台26に水平方向に植設された固定軸27に回動自在に設けられた回転台3と、この回転台3上に載置され、基台26に対する回転台3の回動角度を検出するロータリ・エンコーダ32と、回転台3に載置され、基台26から間口の測定点まで長さを検出するワイヤーまたはテープ38およびインクリメンタル形のリニア・エンコーダ33と、検出した角度データおよび長さデータを対応させて極座標で格納する記憶手段とを具備するものである。
(もっと読む)
座標測定装置及び物体の位置を測定するための方法
測定される物体(15)に接触するためのプローブを有する座標測定装置。プローブは、前記物体(15)に接触するためのセンス部材(18)と、支持ユニット(13)と、前記センス部材(18)を前記支持ユニット(13)に接続する支持素子(25)と、検出部材(22)と、前記検出部材(22)の位置を検出するための検出手段(23)とを有する。前記検出部材(22)は接続素子(26)が持ち、前記接続素子(26)は前記センス部材(18)に取り付けられる。  (もっと読む)
(もっと読む)
免震建物の水平変位計測装置
【課題】安価で、かつ、既に設置されている免震装置に対して格別の設置スペースを確保する必要もなく、簡単に設置でき、水平変位の計測機能の精度もよい免震建物の水平変位計測装置を得る。
【解決手段】すべり部分である積層ゴム4と非すべり部分である滑り板5とからなる免震装置3を配設した免震建物において、すべり部分と水平方向で離間する位置に、水平方向の長尺部材7をすべり部分の水平移動による押圧で水平移動可能に、かつ、移動位置で停止可能に取り付けた。
(もっと読む)
シリンダボア測定装置
【課題】 本発明は、シリンダの上下両面ともに開口されていないシリンダボアの測定が可能なシリンダボア測定装置を提供することを課題とする。
【解決手段】 シリンダ軸52に平行な貫通穴43をシリンダヘッド部14に有するエンジン10のシリンダ11を測定対象とし、シリンダ11の内径53を測定するシリンダボア測定装置40であって、このシリンダボア測定装置40は、貫通穴43にシリンダ11内部からエンジン外へ移動可能に挿入した操作子44と、この操作子44の一端44aに取付けることで、シリンダ11内部に配置する測定ヘッド42と、この測定ヘッド42に取付け、シリンダの内面 までの距離を測る測定子41・・・とからなり、予めシリンダ11内に測定ヘッド42及び測定子41・・・を納め、外から操作子44を操作しながら測定を実施することで、両端が閉じた状態のシリンダ11の内径を測定する。
(もっと読む)
データ自動入力装置
【課題】 矯正分野における模型分析の各部の計測をパソコン入力用インターフェースを有するデジタルノギスを用いて測定し、測定データをパソコンへ直接送ることにより測定値入力の時間を大幅に短縮することができる。また、ヒューマンエラーにより誤った測定値を入力する測定値の入力ミスがなくなる。このようなことを特徴とするデータ自動入力装置を提供する。
【解決手段】 矯正分野における模型分析における各部の計測をパソコン入力用インターフェースを有するデジタルノギスを用いて測定し、測定データを直接パソコンへ送りパソコンにある模型分析用ソフトへ直接入力する。
(もっと読む)
スケール弾性保持方法及び位置測定装置
【課題】スケールとスケール固定具の線膨張係数の差による熱応力を低減すると共に、スケールの長手方向以外への位置変化を防止する。
【解決手段】スケールが内蔵された位置測定装置において、スケール20を、厚さ(X)方向及び幅(Y)方向にそれぞれ位置決めするための基準部材である球B、B'に押し当てた状態で、弾性層30、32を介してスケール固定具10に保持すると共に、該弾性層30、32に収縮する方向の初期弾性力Fx、Fyを付与する。又、スケール20の長手方向の任意の一箇所を、実質上弾性がない非弾性層34、36により接着することで伸縮の基準を明確にする。
(もっと読む)
長さ測定装置の弾性固定具及び固定方法
【課題】大きさや加工精度の制約が小さい上に、製造が容易で、マニュアル工作機械等の比較的厳しい温度環境での使用にも対応でき、平行板ばね機構に比べ小型化、低価格化が可能な弾性固定具を提供する。
【解決手段】長さ測定装置10を、線膨張係数が異なる被測定物Mに取付けるために用いる、該測定装置の長手方向に弾性変形可能な弾性固定具を、一端が長さ測定装置に固定され、他端が被測定物に固定される、板金製曲りはり42、44を含む構成とした。
(もっと読む)
振れ測定装置、現像ローラの選別方法及び振れ測定方法
【課題】回転体の回転軸受け部の外径の変動と、回転体の測定部の外径の変動と、測定時の測定開始時点からの回転角度とを同時に計測し演算処理を活用することにより、高精度な振れ測定を行うことができ、振れによる悪影響を容易に評価可能にする。
【解決手段】胴部1bとジャーナル部1aとを有する現像ローラ1の振れを測定する装置に関する。現像ローラ1のジャーナル部1aをチャックするエアーチャック26と、現像ローラ1をエアーチャック26を介して回転させるためのモータ23及びギヤ23aと、現像ローラ1の回転角度を検出するロータリエンコード24と、胴部1bの外周の測定基準からの変化量情報及びジャーナル部1aの外周の測定基準からの変化量情報に基づいて、振れ量を演算処理するコンピュータ25とを備えている。
(もっと読む)
測定対象物を測定する方法及び装置
【課題】 測定対象物とくに車両ホイールの測定を、より単純で費用効果的な方式で可能にする。
【解決手段】 本発明は、測定用の対象を測定する方法及び装置に関し、対象物座標系の画定のための少なくとも1つの基準構造を有し、対象に関して固定され、測定システムを用いて、これは測定座標系で測定するための対象の輪郭を記録するための少なくとも1つのセンサシステムを有している。本発明によれば、対象物座標系の位置を考慮に入れて、輪郭データと分析ユニットで実行された輪郭データの処理を決定する目的で、測定用の対象がセンサシステムの記録領域の測定位置に置かれていて、対象物座標系の位置が基準構造を用いて固定され、対象物座標系が測定座標系にリンクされ、センサシステムが測定用の対象に対して回転軸心の周りで回転される。本発明は更に、輪郭決定への利用に関する。
(もっと読む)
携帯型の距離測定装置
【課題】本発明は、対象物の表面領域への距離を測定する携帯型の距離測定装置に関する。
【解決手段】距離測定装置は、ハウジングおよび距離の光学的測定のレンズ系を備えている。レンズ系を通して表面領域にビームが送られ、そこで反射する反射ビームを再び集める。距離測定装置は、ハウジングに接続した第1の構成要素を備える。第1の構成要素は、短い距離の測定で、送るビームの方向にハウジングから延ばせて、光学的測定では、スペーサとして作用する。第1の構成要素が延びた状態が、検知装置で自動的に測定される。
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 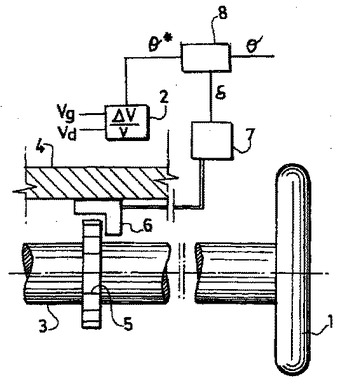 (もっと読む)
(もっと読む)
自動定寸ヘッド
【課題】 バイトが破損したり、測定子を揺動させるエアーシリンダの作動不良等のトラブルや調整ミスによって測定ジョーの先端部に設けた測定子がワークと衝突した場合でも、その衝撃が装置全体に伝わらないようにして、部分的な損傷だけで済ませるようにする。
【解決手段】 ケース本体23に揺動自在に設けられた一対の測定ジョー20と、この測定ジョー20を開閉するエアーシリンダ40と、前記測定ジョー20の先端部に取付けられた測定子22をワーク21に接触させた時の測定ジョー20の位置変化に基づいて測定値を出力する検出器30とを備えてなる自動定寸ヘッドHにおいて、前記測定子22には該測定子22に所定以上の衝撃が加わった時に測定子22の先端部22aが破損する切欠部39を設けた。
(もっと読む)
光ファイバ担持用スペーサの溝ピッチおよび溝反転角度測定装置
【課題】 複数種のスペーサの溝ピッチと反転角度の測定を可能にすること。
【解決手段】 測定装置は、周回する螺旋溝が設けられたスペーサ12,反転する螺旋溝が設けられたスペーサ13の溝ピッチおよび溝反転角度を測定する。スペーサの進行量に対応した信号を発生させる速度パルス発生器16と、螺旋溝に嵌合された回転体18と、回転角度に対応したパルス状の回転角度信号と、回転角度信号から遅延,進行した回転方向判定信号と、螺旋溝の1回転に伴う1回転パルス信号を送出する第1,2パルス発生器19,20とを備えている。演算装置22は、スペーサの種別を選別し、螺旋溝の溝ピッチを演算するとともに、回転角度および回転方向判別信号を受けて、螺旋溝の反転位置を判別し、隣接する反転位置間での前記速度パルス発生器のパルスおよび回転角度信号を計数して、螺旋溝の溝ピッチと溝角度とを演算する。
(もっと読む)
181 - 200 / 200
[ Back to top ]