
Fターム[2F069GG11]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 直接測定 (274)
Fターム[2F069GG11]の下位に属するFターム
Fターム[2F069GG11]に分類される特許
121 - 140 / 200
タイヤ加硫用金型の内周面の真円度測定装置
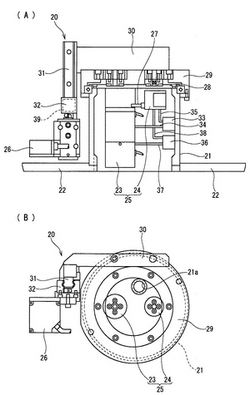
【課題】 タイヤ加硫成形装置のプレスで型閉しめされた実際の稼働状態における金型内周面の真円度を測定できる装置を提供する。
【解決手段】 タイヤ加硫成形装置10のプレス11、12で型閉じされるコンテナ13内に、割り金型の上部サイドプレート14、下部サイドプレート15、トレッドセグメント16が組み込まれ、該割り金型に囲まれた内部空間の中央部に、環状に整列されたトレッドセグメント16からなる金型内周面の真円度測定装置20がセットされ、真円度測定装置20は、下端開口の筒状本体21と、該筒状本体21の下端外周面より突出して下部サイドプレート15の中央開口周縁の嵌合部15aに嵌合保持される取付部22と、筒状本体21の空洞に装備される駆動手段25と、該駆動手段25により筒状本体21の外周面に沿って回転移動される非接触変位測定器26を備えている。
(もっと読む)
形状測定装置用プローブ、形状測定装置及び方法

【課題】 複雑な装置構成を採ることなく側面の傾斜方向を問わずに形状測定可能な形状測定装置、該形状測定装置に備わる形状測定装置用プローブ、及び形状測定方法を提供する。
【解決手段】 取付用部材110に対してスタイラス121を有する揺動部材120を任意方向に傾斜可能にして取付用部材110に連結する連結機構130を設け、上記揺動部材の傾斜角度の大きさがほぼ一定になるよう制御しながら、被測定面51を走査する。この構成により、Z方向にはほぼ平行で、XY方向の任意方向に傾斜した側面形状を測定することができる。
(もっと読む)
寸法測定システム、寸法測定装置及びマスタ
【課題】 マスタを間違えた誤った校正処理を防止できる寸法測定システムの実現。
【解決手段】 寸法測定装置10と、所定の寸法値の部分を有する複数のマスタ50A,50Bとを備え、所定の寸法値の部分を測定して寸法測定装置を校正する寸法測定システムであって、各マスタは、寸法測定装置がマスタの所定の寸法値の部分を測定する状態にあることを検出する測定状態検出手段55と、寸法測定装置が所定の寸法値の部分を測定する状態にあることを検出したことを示す測定状態信号を送信する無線通信手段とを備え、寸法測定装置は、測定状態信号を受信する無線通信手段37を備え、無線通信手段が測定状態信号を受信している時に校正処理を行う。
(もっと読む)
変位計の位置計測方法および位置計測装置
【課題】 小形軽量で、狭隘な設置スペ−スに設置できるとともに、計測器等の修理や部品交換に容易に応じられる、変位計の位置計測方法および装置を提供する。
【解決手段】 距離計測手段30を介し、最先の一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を基準値として計測する。 前記一対の変位計28の折れ角の初期値を演算する。 この後、前記変位計28に一対の変位計28を順次連結して延伸する。 その際前記距離計測手段30を介して、延伸した一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を計測する。 前記延伸した一対の変位計28の折れ角を算出する。 前記折れ角と、延伸した変位計28の枢支部27における三次元位置と、延伸に伴ない変化する先行の折れ角を相対量として検出する。 前記検出角度と変位計28の長さを基に、最先または所望の変位計28の位置を演算する。
(もっと読む)
車両のシートスライド装置
【課題】 位置検出手段による検出部がレールの外部にあると、誤検出を生じる場合がある。
【解決手段】 上部が開口する略コ字形状に屈曲形成され車両のフロアに固定されたロアレール1の前記開口部に、下部が開口する略コ字形状に屈曲形成されシートに固定されたアッパレール2がスライド自在に嵌挿され、アッパレール2に回動可能に支持したロック爪7と、ロアレール1の内部に固定されてロック爪7が係脱可能なロックプレート10とにより、ロック機構6が構成され、前記アッパレール2の位置を検出する近接センサ30がアッパレール2に設けられ、該近接センサ30の検出面30bが、前記ロックプレート10の側面に臨ませてある。
(もっと読む)
回転角度検出装置及び内燃機関の運転制御装置
【課題】 回転体の機械的誤差による影響を低減可能な回転角度検出装置及び内燃機関の運転制御装置を提供する。
【解決手段】 本発明の回転角度検出装置20は、内燃機関1のクランクシャフト8に取り付けられ、かつ複数の歯部21aが回転方向Dに沿って設けられた回転体21と、各歯部21aの前側エッジEf及び後側エッジEbのそれぞれを検出可能な電磁ピックアップ22及び波形整形器23と、を備え、検出された前側エッジEf又は後側エッジEbのいずれか一方を基準にしてクランクシャフト8の回転角度を検出する。そして、隣接する歯部21a間の角度で、前側エッジEfを基準とした角度θfと、後側エッジEbを基準とした角度θbとを算出し、これらの誤差Δθf,Δθbを比較して、前側エッジEf又は後側エッジEbのいずれか一方を回転角度の検出の基準として設定する。
(もっと読む)
走査プローブ顕微鏡
【課題】
高スループットで試料にダメージを与えずに、試料の正確な立体形状情報と同
時に試料の局所的特性に関する分布情報を計測できる走査プローブ顕微鏡を提供
することである。
【解決手段】
光学式の高感度近接センサを具備して試料と探針との接近を制御することによ
って、各測定箇所へのアプローチを高速化した。また、プローブを間歇的に試料
に接触させて探針を試料上で引きずらないようにしながら試料高さデータを得る
と同時に、試料への接触期間に同時に、探針に電圧を掛けたり、探針を振動させ
て応答を計測したり、試料表面の局所的光強度を検出したりすることにより、走
査速度を落とさずに試料上の材質の分布に関する付加的情報を得られるようにし
た。
(もっと読む)
円筒形状の測定方法及び測定装置
【課題】 移動手段の走査動作隙間を検出して変位検出器の値を補正し、前記走査動作の機械的正確さを追求することに負荷を必要としない高精度の測定方法を提供する。
【解決手段】 円筒体を中心軸回りに回転させ、前記中心軸直角断面上に配置され、円筒体の表面変位を計測する変位検出器を移動手段により前記中心軸方向に移動させ、前記変位検出器から得られた所定の位置での複数の検出信号を演算して円筒形状を測定する方法において、前記変位検出器は、第1の変位検出器と、前記第1の変位検出器の移動方向と反対に配置された第2の変位検出器とを有し、前記第2の変位検出器によって前記第1の変位検出器と同一の点を測定し、それぞれの測定値の差から前記移動手段の走査動作隙間を検出して前記第1の変位検出器の値を補正する。
(もっと読む)
油圧作業機械における油圧シリンダのストローク位置計測装置
【課題】
新規に演算処理能力の高い大容量のメインコントローラを開発することなく、多数の油圧シリンダのストローク位置を高精度に計測出来るようにする。
【解決手段】
制御用コントローラ20とは独立して計測用コントローラ30が設けられ、この計測用コントローラ30に回転センサ100、リセットセンサ300の検出信号を入力させてストローク位置の計測処理を行わせ、計測結果を制御用コントローラ20に送るようにする。計測用コントローラ30の記憶テーブル36には、予め回転センサ100の出力電圧値と回転角度との対応関係が記憶されており、回転センサ100の検出信号が入力されると、記憶テーブル36の対応関係を参照して対応する回転角度が求められ、求められた回転角度に基づいて油圧シリンダ200のストローク位置が計測される。
(もっと読む)
軸間角度補正方法
【課題】 複数軸をもつ機械の軸間角度補正が高精度に且つ容易に行える方法の提供。
【解決手段】 機械16のテーブル12に置かれた一の基準球36上の指定移動軸方向位置での測定軸方向形状情報をテーブル12の直線移動により同一基準球36上の複数の異なる指定移動軸方向位置について取得する基準球測定工程(S10)と、該形状情報に基づき該基準球36の測定軸方向形状のピーク点での該センサー14よりの測定軸方向位置情報を各指定移動軸方向位置について求めるピーク検出工程(S12)と、該各ピーク点の位置情報に基づきテーブル12の実際の移動方向を表わす実直線情報を求める誤差情報取得工程(S14)と、該実直線情報に基づき補正用情報を求める補正用情報取得工程(S16)と、該補正用情報に基づき該センサー14よりの測定軸方向位置情報を補正する補正工程(S20)と、を備えたことを特徴とする軸間角度補正方法。
(もっと読む)
回転運動変換装置
【課題】
回転ローラの半径方向の変形、消耗を抑制しつつ、摩擦係数を高めることができるようにして、直動部材の直動位置の計測精度を向上させる。
【解決手段】
回転ローラ110のうち、少なくともロッド2に接触する部分の一部110dを、回転ローラ110の回転中心軸110cとロッド202の表面との距離を一定値dに保持することができる程度に硬い材料(たとえばS45C)で構成し、回転ローラ110のうち、少なくともロッド2に接触する部分の他の一部114を、回転ローラ110とロッド202との間で滑りが生じない程度に摩擦係数が高い材料(NBR等の弾性部材)で構成する。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、誤差がなく、高精度な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】第一の検出体3を回転体1へ押圧する付勢手段としてのばね15を設けると共に、ケース12の貫通孔12Aに、挿通された摺接部1Cが当接する複数の突出部12Bを形成することによって、押圧付勢された回転体1の摺接部1Cが、常に複数の突出部12Bに弾接して回転するため、回転体1が偏心せずに回転し、誤差がなく、高精度な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
走査型プローブ顕微鏡の探針交換方法
探針20を備えるカンチレバー21と、探針・試料間の物理量を測定する測定部を備え、試料表面を測定する走査型プローブ顕微鏡の探針交換方法である。走査型プロープ顕微鏡は、カンチレバーの取付け部22と、カンチレバーカセット30と、カンチレバーカセットを移動させるXYステージ14とZステージ15と、光学顕微鏡18を備える。上記の走査型プローブ顕微鏡において、カンチレバー取付け部とカンチレバーカセットの間の位置合せを行い、カンチレバーカセットからカンチレバーを選んでカンチレバー取付け部に装着する第1ステップと、カンチレバー装着後に、光学顕微鏡装置を移動させ、装着されたカンチレバーを観察視野の所定位置に設定する第2ステップとを含む。第2ステップでは、光学顕微鏡側またはカンチレバー側を移動させて位置調整を行うステップを設ける。  (もっと読む)
(もっと読む)
プローブ
【課題】 接触部の脱落事故がなく信頼性が向上するプローブを提供すること。
【解決手段】 軸部2と、軸部2の先端部分に設けられた接触部3と、を備える。軸部2は、その先端部分が接触部3に埋設されている。かつ、先端部分には軸部2の軸方向に対して交差する方向へ張り出したフランジ部22を備える。フランジ部22は、先端方向に行くに従って拡径する形状である。
(もっと読む)
身体組成測定装置
【課題】被験者による入力の煩雑さを軽減することのできる身体組成測定装置を提供すること。
【解決手段】被験者の身体の複数の所定の部位に対応付けて接触させるための複数の電極11〜18と、被験者の手で保持可能な保持部2と、保持部2に一端が接続されるケーブル3と、被験者の足を載置可能な載置部1とを備え、引出量検出部により検出された引出量および角度検出部で検出された角度に基づいて、被験者の所定の身体部位の部位長を計算するための部位長計算部101と、複数の電極11〜18を用いて、所定の身体部位のインピーダンスを計測するためのインピーダンス計測部102と、部位長計算部101で計算された所定の身体部位の部位長と、インピーダンス計測部102で計測されたインピーダンスとに基づいて、所定の身体部位の身体組成を算出するための体組成算出部とを備える。
(もっと読む)
ガイドレールの据付精度測定装置及び測定方法
【課題】ガイドレールの据付精度を簡単且つ短時間に計測することにある。
【解決手段】昇降路内を昇降する昇降体を案内するガイドレール31の据付精度を測定する装置において、昇降体とガイドレール31との相対距離を検出する変位検出センサ34と、前記昇降体に取付けられ該昇降体の絶対変位を検出する振動系35及びこの振動系に取付けられた変位検出センサ36と、前記変位検出センサ34及び変位検出センサ36により検出された相対距離データ及び絶対変位検出データをもとにガイドレールの据付精度を演算する。
(もっと読む)
検査装置及び検査方法
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
回転角度検出装置
【課題】製造コストを低減することができる回転角度検出装置を提供する。
【解決手段】ステアリングシャフト12と一体的に回転する主動歯車14には同一の軸を中心として回転する歯数の異なる第1及び第2の主動歯車部61,62を設けるようにした。一方、第1及び第2の従動歯車15,16の歯数をそれぞれ同じとし、それら第1及び第2の従動歯車15,16を第1及び第2の主動歯車部61,62にそれぞれ噛合させるようにした。このため例えば歯数の異なる二種類の従動歯車をそれぞれ同一の主動歯車に噛合させることで減速比を異ならせるようにした場合と異なり、単一種類の主動歯車14と単一種類の第1及び第2の従動歯車15,16を用意すればよいので、回転角度検出装置11の製造コストを低減することができる。また、第1及び第2の従動歯車15,16の主動歯車14に対する組み付け間違いもない。
(もっと読む)
プローブの姿勢補正機能を有する三次元座標測定装置
【課題】 被測定物を入れ替えながら繰り返し測定を行う場合に適したプローブ姿勢の補正技術を提供し、入れ替え測定の作業効率を改善する。
【解決手段】 本発明の三次元座標測定装置は、プローブ姿勢制御部、座標設定部、基準座標記憶部、角度差検出部、および姿勢補正部を備える。プローブ姿勢制御部は、プローブの姿勢を制御する。座標設定部は、被測定物の配置状態を取得して、三次元座標値の基準とする基準座標を設定する。基準座標記憶部は、第1被測定物に設定された第1基準座標を記憶する。角度差検出部は、第2被測定物に設定された第2基準座標を取り込み、基準座標記憶部の第1基準座標と、第2基準座標との角度差を求める。姿勢補正部は、第2被測定物の三次元測定に際して、第1被測定物に対して調整されたプローブの姿勢を角度差に応じて姿勢補正する。
(もっと読む)
掘進機および計測装置
【課題】 チャンバ内の土砂の性状を、リアルタイムでより合理的に把握できる掘進機および計測装置を提供すること。
【解決手段】 計測装置20を、カッタ3の板状部材17に連結され、チャンバ9内に突出した棒状材19、棒状材19に設置された歪みゲージ21、コンピュータ(図示せず)等で構成する。棒状材19は、一端が板状部材17に固定されるか、ピン接合される。掘進機1がカッタ3を回転させて地山を掘削すると、カッタ3の板状部材17に連結された計測装置20は、掘削土砂が充満したチャンバ9内を回転移動する。計測装置20の歪みゲージ21は、チャンバ9内の掘削土砂から受ける力による棒状材19のたわみ(変位もしくは変形)を計測する。計測装置20では、コンピュータ(図示せず)等に歪みゲージ21が計測した計測値を送り、計測値に基づいてチャンバ9内の掘削土砂の性状を把握する。
(もっと読む)
121 - 140 / 200
[ Back to top ]