
Fターム[2F069HH09]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | 非接触変位計、距離計 (231)
Fターム[2F069HH09]に分類される特許
41 - 60 / 231
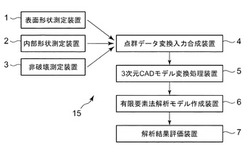
3次元形状測定システムおよび強度評価システム
【課題】被測定対象物の周囲に障害物がある場合においても正確に3次元形状を測定することのできる3次元形状測定システムおよび測定された3次元形状によって容易に強度を評価することのできる評価強度評価システムを得ることにある。
【解決手段】被測定対象物の3次元表面形状を測定する表面形状測定装置1と、被測定対象物の3次元内面形状を測定する内面形状測定装置2と、被測定対象物の構造材内部の状態を測定する非破壊測定装置3と、この表面形状測定装置、内面形状測定装置、非破壊測定装置によって計測された3次元点群データを入力合成する点群データ変換入力合成装置4と、この点群データ変換入力合成装置によって合成処理した点群データから3次元形状を作成する3次元形状変換処理装置5を有することを特徴とする。
(もっと読む)
ガラス条の反り測定方法およびガラス条の製造方法

【課題】母材ガラス板を加熱延伸しながらガラス条の反りを測定できるガラス条の反りの測定方法およびこれを用いたガラス条の製造方法を提供すること。
【解決手段】加熱延伸装置を用いて母材ガラス板を加熱延伸しながら、該延伸して形成したガラス条の幅方向の中心および両端部近傍を含む少なくとも3点において該ガラス条の表面および裏面の相対位置を検出し、該検出した相対位置に基づいて前記ガラス条の反りを測定する。好ましくは、前記ガラス条に向かって光を照射し、該ガラス条の表面および裏面からの前記光の反射光を測定することによって、前記相対位置を検出する。
(もっと読む)
光学素子位置調整装置、光学系、露光装置及びデバイスの製造方法
【課題】光学素子の波面収差を好適に維持できる光学素子位置調整装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】光学素子位置調整装置は、ミラー33,35を保持し、且つ鏡筒29に対してミラー33,35を6自由度方向に移動させるべく駆動する駆動部を有するミラー保持装置と、第6ミラー35のZ軸方向における位置を計測するための第6軸方向計測器61Fと、第4ミラー33のY軸方向における位置を計測するための鏡筒半径計測器62及び間隔計測器63と、各計測器61F,62,63からの計測結果に基づきミラー保持装置を制御する制御装置とを備えている。
(もっと読む)
断面形状の測定装置と測定方法
【課題】測定対象物に形成された円形孔の軸に垂直な断面形状を測定する技術を提供する。
【解決方法】断面形状測定装置10は、移動機構26と、回転機構38と、距離センサ12と、コンピュータ20によって測定手段を構成しており、下限位置A2において基準軸32の回りの断面形状(測定形状)を測定する。コンピュータ20は演算手段を構成しており、測定手段によって測定された楕円形状となる測定形状の長径と短径の長さ及び長径方向に基づいて、測定対象物16に形成された円形孔34の軸に垂直な断面形状を測定する。下限位置A2における測定形状のみをもちいて、円形孔34の軸に垂直な断面形状を測定することができる。
(もっと読む)
一軸コンバインドプラント及びこの一軸コンバインドプラントの起動方法
【課題】本発明は、クラッチ嵌合時の2つの軸の軸ずれを測定する軸ずれ測定装置及びこの軸ずれ測定装置を備えた一軸コンバインドプラントを提供することを目的とする。
【解決手段】制御装置10において、ガスタービン3の軸3aと蒸気タービン5の軸5aとの軸ずれ量を測定し、測定した軸ずれ量に応じて蒸気タービン5の回転速度の昇速率及びヒートソーク時間を設定し、クラッチ7が軸3a,5aを結合するときの軸ずれ量が許容範囲内に収まるようにする。
(もっと読む)
スパイラル鋼管の製造方法および形状測定装置
【課題】スパイラル鋼管の製造工程において、鋼帯の成形・溶接後の鋼管の形状をオンラインで計測可能であるとともに、現状の設備を活用し極力簡単な設備改造で計測可能なスパイラル鋼管の製造方法および形状測定装置を提供する。
【解決手段】このスパイラル鋼管の形状測定装置は、鋼帯2を内面ローラー4および外面ローラー4を備える成形装置3を用いて管状に成形した後、鋼帯2の幅方向端面突合せ部をサブマージアーク溶接して鋼管7にするスパイラル鋼管の製造方法の溶接工程に用いられるスパイラル鋼管の形状測定装置であって、内面ローラー4を支持するマンドレル1の先端部に設けられて鋼管7の内面までの距離を非接触で測定する距離計17と、距離計17を鋼管7の周方向に回転させるモータ15と、距離計17の回転角を計測する回転角計測手段とを備えている。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)と、保護手段に供給されるクリーンエアーの浄化を行う集塵手段44を備える。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
情報処理装置、情報処理方法、情報処理プログラム、間仕切りパネル
【課題】
本発明では、他の情報処理装置との位置関係を把握した上で、所定の位置関係にある他の情報処理装置と、高度なセキュリティ機能を有する情報処理システムを自立的に構築する情報処理装置等を提供することを目的とする。
【解決手段】
本発明に係る情報処理装置は、距離計測用センサを用いて計測した距離に基づいて、当該情報処理装置の位置を基準とした他の情報処理装置の位置を検出する位置検出手段と、位置検出手段による検出結果に基づいて、当該情報処理装置と他の情報処理装置とが所定の位置関係にあるか否かを判定する位置判定手段と、対象物検出用センサを用いて、対象物を検出する対象物検出手段と、位置判定手段により所定の位置関係にあると判定された他の情報処理装置に対して、対象物検出手段により検出された対象物を識別する識別情報を通知する情報通知手段と、を有することを特徴とする。
(もっと読む)
工作機械の状態検知装置および方法
【課題】被加工物と工具取付け軸の位置を常に正しく検知しながら正しい寸法の加工物が得られる工作機械の状態検知装置および方法を提供する。
【解決手段】数値制御自動工作機械1において工具取付け軸6はX軸方向の正逆両方向へ駆動され、工具保持部材7はZ軸方向の正逆両方向へ駆動され、移動テーブル13はY軸方向の正逆両方向へ駆動される。工具取付け軸6先端の工具8は移動テーブル13上に固定して載置される被加工物に対して相対的にXYZの3次元方向へ移動しながら被加工物を所定に形状に加工する。工具取付け軸6の下部に配設された波動発信器9から所定の波動エネルギーが常時発信され、据付テーブル3の一方(図の左方)の端部の2個の波動受信機12a、12b、長短4本の波動受信機設置アーム14a、14b、15a、15bに設けられた4個の波動受信機12c、12d、12e、12fにより常時工具取付け軸6の位置と被加工物との位置関係を検出しながら工具8により被加工物が加工される。
(もっと読む)
サーマルチャンバ
【課題】近年の基板サイズの大型化傾向に従って、基板を戴置するためのステージも大きくなってきている。このため、測定装置そのものが大きくなってきているこの大きくなった装置を収容するべく、サーマルチャンバは、送風ブース内のスペースの内容積が大きくなり、従って温同調節に必要な雰囲気容量が多くなるため、そのスペース内の温度性能を保つため、温調ユニットを大くしなければならないという問題があった。
【解決手段】測定装置のステージ部架台より出された支持金具によって、サーマルチャンバの送風ブースを支持し、石定盤より上方のステージ部分のみ、一定温度に保つ構造とし、更に好ましくは、温調ユニットと送風ブースとを分離することにより、温調ユニットの機械振動を送風ブースに伝えない機能を備えたサーマルチャンバとした。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、金属帯の搬送速度を測定する速度測定手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
ロール状原反の評価方法
【課題】長尺体のロール状原反の幅方向に沿った表面形状を適切に評価することができるロール状原反の評価方法を得る。
【解決手段】本発明の実施形態に係るロール状原反の評価方法では、磁気テープ原反をハブに巻き回して形成された磁気テープ原反ロールの幅方向に沿った表面形状を測定し、該測定結果を磁気テープ原反ロールの全幅に亘って単一の4次関数に最小2乗近似することで、該磁気テープ原反ロールの表面の幅方向に沿った形状トレンド値を定量化する。
(もっと読む)
樹脂押出用口金装置及び樹脂シートの製造方法
【課題】吐出口から吐出される樹脂材料のシート厚を正確に制御すること。
【解決手段】互いにリップ面11を対向させた状態で接続した一対のリップ10と、リップ面11の相互間距離を調整する調整手段20とを具備し、リップ面11の相互間に構成されるスリット状の吐出口12から樹脂材料を吐出する樹脂押出用口金装置において、吐出口12の外部においてリップ面11に平行となる態様でリップ10に設けた測定面13と、測定面13に対向する態様でリップ10に保持され、予め設定した計測基準から測定面13までの距離を計測する変位センサ30とを備えている。
(もっと読む)
ハブの姿勢検出方法及びその装置
【課題】車両のハブに車輪を取付ける際のハブの傾き、中心及びハブボルトの方位の検出工数を低減できる技術を提供することを課題とする。
【解決手段】距離計測部16をハブ26に臨ませる。距離計測部16を、矢印(3)のように、100mm/sの速度で移動させる。このとき、第1距離計31は破線で示すエリアPまでの距離を計測し、第2距離計32は破線で示すエリアQまでの距離を計測する。
【効果】基準位置からエリアP、Qまでの距離を計測する。ハブ面の全部ではなく、2つのエリアのみ距離計測するので、計測工数及び演算工数が低減できる。加えて、非接触のまま1回の走査で距離計測が完了するので、計測工数を低減できる。
(もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 軸部1bの一端に球面形状部1aを有する被測定物1を、被測定物支持手段10により軸部1bの中心軸回りに回転させる。球面形状部1aの表面位置を非接触で測定する非接触変位計31を、その中心軸上の所定位置を回動中心として軸部1bの中心軸を含む平面内で、変位計回動手段32により回動させる。被接触変位計31の軸方向位置は軸方向位置調整手段41で調整する。これにより、被測定物1を回転させながら、その軸部1bの中心軸を含む平面内で前記球面形状部1aの中心を回動中心として非接触変位計31を回動させて、球面形状部1aの球面形状測定を行う。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
検査装置
【課題】測定試料を変えるたびごとに測定点の位置補正を行う必要がなく、更に、測定試料上の同一点についての複数種類の特性の測定を、同一検査装置を用いて行なうことができる検査装置を提供する。
【解決手段】試料を載置するためのステージ3と、1又は複数の検査機器6、7を支持可能な検査機器支持用ヘッド5と、ステージ及び/又は検査機器支持用ヘッドを支持している移動機構23、43と、ステージ上の基準点の実座標と目標座標との偏差を格納する偏差格納部と、複数の検査機器の測定点間のオフセット値を格納するオフセット値格納部と、格納された偏差及びオフセット値を参照して、複数の検査機器のうちのいずれか1つの検査機器の測定点と他の検査機器の測定点とが一致するように、ステージ及び/又は前記検査機器支持用ヘッドを移動させる位置制御部と、を備えている。
(もっと読む)
41 - 60 / 231
[ Back to top ]