
Fターム[2F069HH09]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | 非接触変位計、距離計 (231)
Fターム[2F069HH09]に分類される特許
121 - 140 / 231
旧ゴムゲージ測定機
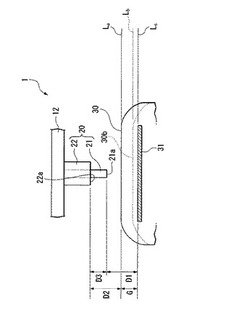
【課題】測定値のバラツキを少なくすることで、測定精度を向上させた。
【解決手段】旧ゴムゲージ測定機1は、スチールベルト層31のベルト外周面Lcまでの第1測定距離D1を測定する渦電流センサー21と、渦電流センサー21に接して固定され、バフタイヤ30の外周面までの第2測定距離D2を測定するレーザー変位センサーとを備えている。渦電流センサー21の検出コイル21a及びレーザー変位センサー22の検出端22aは、固定された回転軸を中心に回転するバフタイヤ30の外周面Laより一定距離をもって固定されている。両センサー21、22のセンサー間距離D3は一定であり、第1測定距離D1とセンサー間距離D3の和から第2測定距離D2を減じることで旧ゴムゲージGが算出される。
(もっと読む)
内部検査装置

【課題】管路計測や孔内計測において、管路や地盤等の内部状況を的確に把握可能な内部検査装置を提供する。
【解決手段】ピッチ角、方位角、ロール角を検出する角度検出器2と、この角度検出器2の管内又は孔内の壁面に対する踊り量を検出する非接触変位センサ3,4と、を有し、管路内又は地盤に形成された孔内に挿入され、内部を移動可能な内部検査装置1であって、該管路内又は孔内を撮影する撮影手段を先端に備える構成とする。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
円筒体の形状測定方法および同装置
【課題】測定装置の複雑化を招くことなく、形状測定の信頼性を確保することができる円筒体の形状測定方法を提供する。
【解決手段】円筒体90の両側端部近傍の内周面92に一対の基準部20,20を当接させたまま円筒体90を回転させ、円筒体90の外側から基準部20,20に対峙する位置31,31において、円筒体90の回転に伴う前記円筒体90の外周面91の半径方向の変位量を変位検出器によって検出する。一方、形状測定されるべき円筒体90が存在しないときに、この円筒体90の変位量測定を行う変位検出器を用いて基準部20,20の回転に伴う変位量検出を行い、この一対の基準部20,20の変位量に応じて、円筒体90の変位量検出を補正する。
(もっと読む)
回転体測定方法
【課題】高次の次数kを考えた場合でも、正しく計算できない次数kが出てくるということがなく、回転体の形状r(θ)、ひいては回転振れ量x(θ)、y(θ)を正しく求めることができる回転体測定装置20および方法を提供する。
【解決手段】4本以上の検出器を用いて、(22)式および(23)式の分母にくる倍率係数α1k、β1k等が均一になる検出器の角度配置を複数組選択する。(22)式および(23)式の分母が0となる部分は複数組の間で補完しあうように倍率H1k、H2k(結果的に倍率係数α1k、β1k等)を選択する。この補完しあう倍率係数α1k、β1k等(結果的にAak、Bak)を用いて形状r(θ)と回転振れ量x(θ)、y(θ)を求める。
(もっと読む)
円筒体の形状測定方法および同装置
【課題】測定装置の複雑化を招くことなく、形状測定の信頼性を確保することができる円筒体の形状測定方法を提供する。
【解決手段】円筒体90の両側端部近傍の内周面92に一対の基準部20,20を当接させたまま円筒体90を回転させ、円筒体90の外側から基準部20,20に対峙する位置31,31において、円筒体90の回転に伴う前記円筒体90の外周面91の半径方向の変位量を変位検出器によって検出する。一方、形状測定されるべき円筒体90が存在しないときに、この円筒体90の変位量測定を行う変位検出器を用いて基準部の位置検出を行い、形状測定の基準とする基準部20,20の位置ずれを未然に検出する。
(もっと読む)
車輪状態検出装置および車輪状態検出方法
【課題】ホイールの変位を検出し車輪状態を判別する。
【解決手段】車輪状態検出装置10は、車輪の一部を構成するホイール12の第1位置の径方向の変位を検出する第1変位センサ14と、ホイール12の第1位置より車輪の回転軸方向外側に位置するホイール12の第2位置の径方向の変位を検出する第2変位センサと16、第1変位センサ14が検出した変位に基づく第1出力値と、第2変位センサ16が検出した変位に基づく第2出力値とを用いて車輪状態を判別する制御部24と、を備える。
(もっと読む)
圧電体薄膜の評価装置
【課題】測定誤差の少ない圧電体薄膜の変位量を得ることができる圧電体薄膜の評価装置を提供する。
【解決手段】圧電体薄膜31の評価装置11は、圧電体薄膜31の測定面に接触させる試料固定治具20の上方に備えられたプローブ13と、プローブ13にレーザー光34を照射する光源16と、プローブ13のたわみによって変位した反射光レーザー35を受光する位置検出素子17と、位置検出素子17によって受光した反射光レーザー35のずれ量から変位量を算出する位置検出信号処理回路18と、圧電体薄膜31を固定する試料固定治具20とを有する。圧電体薄膜31は、試料固定治具20によって、電界方向に対して交差する方向の測定面とプローブ13(探針33)とが直接接触することができる上面になるように固定される。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
形状測定装置、形状測定方法
【課題】様々な厚みの測定試料の表面形状を測定する場合でも、事前の校正作業工数の増大を伴うことなく、高い測定精度を確保して測定できること。
【解決手段】変位計2で測定位置を2次元方向に走査させつつ得られる計測値から測定ウェハ4の表面形状を測定する場合に、測定ウェハ4と厚みが異なるが材料及び平面視した形状が同じ基準ウェハの厚み、及びそれが支持部1で支持された場合の自重による撓み量、並びに走査手段3の走査ぶれ量を予め記憶し、対向配置した変位計2a,2bによる測定ウェハ4の厚み計測、変位計2による測定ウェハ4の表面変位計測を行い、計算機7により、予め記憶された基準ウェハの厚み及び自重撓み量と測定ウェハの厚み計測値とにより、測定ウェハ4の自重撓み量を算出し、走査ぶれ量と測定ウェハ4の自重撓み量及び表面変位計測値とにより測定ウェハ4の表面形状値を算出する。
(もっと読む)
駆動軸損傷診断装置
【課題】 圧延設備等の駆動軸の損傷を診断するに際して、変位センサから出力された生波形から駆動軸のクロスの剥離および摩耗の両方ともの判別を可能とした駆動軸損傷診断装置を提供する。
【解決手段】 変位センサの出力から駆動軸の損傷状態を検出する処理手段は、変位センサの出力波形に対して移動平均によるスムージングを行うスムージング手段と、スムージングされた変位センサの出力波形をFFT変換するFFT変換手段と、FFT変換で得られたスペクトルから回転同期成分を除去して逆FFTにより時間軸波形に変換する逆FFT変換手段と、逆FFT変換で得られた波形の平均値から摩耗状態を判定する摩耗判定手段と、逆FFT変換で得られた波形の振幅から剥離状態を判定する剥離判定手段とを含んでいる。
(もっと読む)
タイヤの形状深さおよび形状の種類ならびに走行時の車両の速度および地上高の検出装置
【課題】交通量の多いところにおいて使用でき、人々への危険性がなく、高速の車両に対応し、操舵状態でも測定可能であり、罰金の発行または警告情報を発することができる、空気タイヤの形状深さおよびタイヤのセットの種類を検出する測定システムを提供する。
【解決手段】本発明の測定システムは、形状測定装置3、7と、車両を検出するカメラシステム8と、これらを互いに接続している評価ユニット16とを備え、さらに、車両の速度を検出する速度測定装置と、操舵状態または移動方向を検出する走行方向測定装置3、7を備えており、車両が比較的均一な速度で、直線走行している状態で所定のフレーム内に位置する場合にのみ評価できる。
(もっと読む)
非接触式膜厚計
【課題】塗膜の膜厚やその乾燥/湿潤状態に関わらず、塗膜の厚さを簡便にかつ高精度に計測する。
【解決手段】非接触式膜厚計10において、本体11の底面13に渦流変位計のための中空管状のプローブ12を取り付ける。プローブ12の先端にコイル14を設ける。底面13において、中空管状のプローブ12の内側にレーザ変位計のレーザ照射部15とレーザ受光部16とを設ける。コイル14により交流磁界を生成し、金属板Sに渦電流を誘導する。誘導された渦電流によるコイル14のインダクタンス変化を検出し、プローブ12と金属板Sまでの距離L2を算出する。一方、レーザ照射部15からレーザ光線を照射し、塗膜Fの表面で反射されたレーザ光線をレーザ受光部16において検出する。三角測距の原理に基づいて、レーザ変位計と塗膜表面との間の距離L1を算出する。距離L1、L2に基づいて塗膜Fの厚さδを算出する。
(もっと読む)
3次元測定方法およびシステム並びにマニピュレータの制御方法および装置
【課題】マニピュレータなどを用いて3次元測定器による物体の測定を行う際に、3次元測定器と物体との相対的な位置および姿勢を容易に決定できること。
【解決手段】3次元測定器または物体の一方を固定し、他方を位置および支持姿勢が変更可能なようにマニピュレータで支持点において支持し、支持点を第1の位置Pおよび姿勢Aとして第1の測定を行い、支持点を第2の位置P’および姿勢A’となるように変更し、その際に、第2の位置P’が、第1回の測定における3次元測定器の測定可能領域内の基準位置Cfを中心として、第1の姿勢から第2の姿勢への変化分dAと同じだけ反対側へ姿勢を変化させた位置P’となるようにし、位置および姿勢の変更を行った後で第2の測定を行う。
(もっと読む)
塗装検査装置及び塗装検査方法
【課題】塗装の補修により発生する微小傷群を、作業者が確実に視認することが可能であって、作業者の官能に頼らず客観的に塗装の良否を判断できる装置を提案する。
【解決手段】塗装面Fの検査部位Faに光を照射する照明手段11と、検査部位Faの表面での反射光を撮像する撮像手段12と、該撮像手段12から信号を受けて画像処理を行う画像処理手段21と、検査部位Faの表面と撮像手段12との距離を検出する変位検出手段13Aと、検査部位Faの表面と撮像手段12の光軸との垂直度を検出する垂直度判定手段13Bと、変位検出手段13A・垂直度判定手段13Bからの信号を受けて撮像手段12と検査部位Faの表面との距離及び角度が検査可能な状態であるか否かの判定を行う判定手段13とを、塗装検査装置8に備えた。変位検出手段13A及び垂直度判定手段13Bとして超音波式変位センサを採用し、距離と同時に垂直度を検出可能とした。
(もっと読む)
回転精度測定方法
【課題】
3個の変位計間の相対角度が正確であるかどうかを評価することができ、回転軸の回転ムラを補正することができ、変位計の中心位置が回転軸上の同じ測定部位を指しているかどうかを評価することができ、ひいては3点法の特性を有効にかつ容易に活用して回転軸の回転精度を測定することができる回転精度測定方法を提供する
【解決手段】
それぞれの中心位置が回転する測定対象物の外周面上の同一回転軌跡上にあるように配置した3個の非接触型の変位計のプローブによって前記測定対象物の回転運動を測定し、前記測定対象物の回転精度成分と前記測定対象物の形状成分とを含む前記変位計の出力信号を処理して前記形状成分を分離して前記測定対象物の回転精度を測定する方法であって、前記処理の前に前記変位計の出力信号における前記回転の回転速度のムラを補正する
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメントを測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能なロ−ラフレ−ム32に設けた複数のロ−ラ33に車輪34を載置する。
前記車輪34のアライメントを測定するアライメント測定方法であること。
前記ロ−ラフレ−ム32を、被検車両のステアリング機構のヒステリシス位置情報を基に所定角度回動する。
ロ−ラフレ−ム32の前記回動位置でアライメントを測定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメント測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、簡単な構成によって測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能な複数のロ−ラ20に車輪21を載置する。
前記車輪20のアライメントを測定するホイ−ルアライメント測定方法であること。
前記車輪20に連係するステアリングホイ−ル28を、そのステアリング機構のヒステリシス位置情報を基に所定角度回動する。
前記ステアリングホイ−ル28の所定角度回動位置でアライメント測定する。
(もっと読む)
膜厚測定装置
【課題】 簡易な構成で、精度良く膜厚測定可能な膜厚測定装置を提供する。
【解決手段】 膜厚センサ20によって測定されたベルト12の膜厚測定結果について、シャフト変位量測定用センサ16、及びシャフト変位量測定用センサ18の検知信号に基づいてもとめたシャフト14の長手方向の水平方向に対するゆがみに基づいてゼロ点補正を行う。 また膜厚センサ20によって測定されたベルト12の膜厚測定結果について、膜厚測定装置内10の環境温度に応じた基準環境温度に対する膜厚変動値に基づいて補正を行うことができるので、環境温度の変動による膜厚測定センサ20の測定結果の変動を抑制することができ、精度良く膜厚を測定することができる。
(もっと読む)
物体形状検査装置及び物体形状検査方法
【課題】 被測定物(例えば自動車用ガラス又はその検査用枠材)の形状を高精度に検査することができる物体形状検査装置の提供。
【解決手段】 被測定物の2点以上の測定点についての少なくとも鉛直方向に関する位置情報を、接触方式又は非接触方式の測定手段を用いて取得する物体形状検査装置60において、被測定物の各測定点に対応する各測定位置に、測定手段を案内する案内機構66と、測定手段62bの測定データを、測定手段の水面に対する移動軌跡に関する事前取得情報に基づいて補正して、各測定点の鉛直方向の位置情報を生成するデータ処理装置80と、を備えることを特徴とする。
(もっと読む)
121 - 140 / 231
[ Back to top ]