
Fターム[2F069HH30]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | その他の特定された測定器機 (227)
Fターム[2F069HH30]に分類される特許
1 - 20 / 227
状態検出装置、電子機器及びプログラム
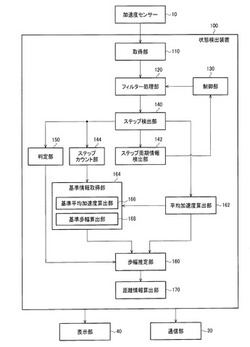
【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
3次元寸法測定方法

【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
長さ測定装置
【課題】高い測定精度を備える良好に操作可能で安定した長さ測定機を提供する。
【解決手段】スケール3が中空成形部材4内に保護されるように配設されたカプセル化された長さ測定装置において、基準点を構成するため、固定要素10が設けられ、この固定要素が、一方で、スケールを固定装置10に位置不動に固定し、他方で、測定すべき対象1に位置不動に固定可能であり、固定要素10が、更に、固定要素10を測定方向Xに移動可能に中空成形部材4内に固定する少なくとも1つの長さ補正要素を備え、この少なくとも1つの長さ補正要素が、特に、測定方向Xの補正運動だけを可能にする固体ジョイント131,132の装置の形態に形成されている。
(もっと読む)
鋼管湾曲量測定装置及びその方法
【課題】容易かつ高精度に、鋼管の湾曲量を測定することが可能な鋼管湾曲量測定装置を提供する。
【解決手段】鋼管湾曲量測定装置2は、レーザ光照射装置20を保持し、鋼管10の表面に固定して配置する固定側保持体21と、目盛りMを付したスケール部材22を保持し、鋼管10の表面上を軸方向に移動させて所定の測定位置に配置する移動側保持体23とを備える。固定側保持体21と移動側保持体23は、鋼管10の外周面に当接した際に鋼管10の当接した箇所の軸方向に対する向きが特定の一の向きとなる形状に構成されている。固定側保持体21と移動側保持体23とを鋼管10の外周面に当接させた状態で、レーザ光照射装置20の光軸Aの方向、及びスケール部材22の目盛りMの臨む方向が、それぞれ鋼管10の前記当接した箇所の軸方向と平行になるように保持する。
(もっと読む)
連続鋳造機におけるロールのロール間隔異常判定方法
【課題】連続鋳造機におけるロールのロール間隔の異常を迅速、かつ、正確に判定できる方法を提案する。
【解決手段】ダミーバー5の引き抜き中に、該ダミーバー5と帯同して移動する前記ロールギャップ計測計rの位置をトラッキングするとともに、該ロールギャップ計測計rによりロールの各ロール間隔gを計測する。そして、トラッキングにより得られたデーターと、計測されたロールの各ロール間隔とを基に、該ロールにおける各ロール間隔のピーク値を求め、そのピーク値と、予め設定された持ロールの各ロール間隔gとを比較することによりロール間隔の異常の有無を判定する。
(もっと読む)
長尺体の直線度の経時変化を把握する方法、システム
【課題】長尺体の直線度の経時変化を把握する方法およびシステムを提供すること。
【解決手段】長尺体の直線度の経時変化を把握する方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S3)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S4)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S5)と、定期的に前記移動体を移動させ、その都度前記情報処理部が前記情報処理し、該情報処理した結果の経時変化を、記憶部が記憶する記憶工程(S6)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度測定装置、長尺体の直線度測定方法
【課題】長尺体の直線度を容易に測定することを考慮した直線度測定装置を提供すること。
【解決手段】長尺体13の直線度測定装置1は、第1直線ガイド部材2と、第2直線ガイド部材3と、移動体4と、角速度センサー(5)と、情報処理部10と、測定対象の長尺体13と前記第2直線ガイド部材3とが一つの直線軸を形成するように、前記測定対象の長尺体13を取り付け可能な取り付け部11と、を備え、前記移動体4が、前記第1直線ガイド部材2と前記長尺体13とにガイドされて一の方向へ移動し、前記移動体4が移動している間の前記角速度センサー(5)の姿勢の変化の情報と前記長尺体13における移動中の前記角速度センサー(5)の位置との関係を、前記情報処理部10が関連づけして情報処理することにより前記長尺体13の直線度を測定する構成であることを特徴とする。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
斜面安定化システム
【課題】現斜面の状況に応じて簡易な対策工を施して、斜面崩壊の発生の恐れを僅かでも少なくするとともに、斜面崩壊が発生した場合の被害を最小限にとどめることを可能にし、また、斜面崩壊の可能性が高まった時に住民が適切な対応をすることを可能にする斜面安定化システムを提供する。
【解決手段】土塊の移動に伴って抵抗力を発揮して斜面の不安定な土塊の移動の程度を小さくすることが可能な斜面安定化構造体を斜面に施工する。この場合、1.0超、1.2未満の安全率Fsにて施工する。斜面安定化構造体を構成する斜面安定化部材体に変位センサを取り付け、当該斜面の土塊が移動した時に前記変位センサが検知した信号に基づいて危険度信号を発信する危険度信号発信手段を設け、この危険度信号発信部の発信情報を受信する危険度信号受信手段を設ける。
(もっと読む)
測定データ無線転送システム
【課題】消費電力が低く、且つ混信の発生を防ぐことのできる測定データ無線転送システムを提供する。
【解決手段】複数の子機10と、各子機10から送信された測定データを受信する親機20とを備えた測定データ無線転送システム100において、子機10の各々は、初期設定時に親機20に対して、所定の基準時点から測定データを送信するまでの待ち時間を設定する待ち時間情報を含む設定データを要求する設定要求信号を出力し、親機20からの設定データに基づいて測定データの送信タイミングを制御し、測定データの送信タイミングには親機20との通信を行う通信部11を起動状態とさせ、当該測定データの送信後には通信部11を停止させ、親機20は、子機10の各々が互いに異なる送信タイミングで測定データを送信するよう待ち時間情報を決定し、設定要求信号に応じ、複数の子機10に対して待ち時間情報を含む設定データを送信する。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
測定方法及び測定装置
【課題】現場等での測定が可能でありながら、迅速な測定を行える測定装置及び測定方法を提供する。
【解決手段】ゼロ点誤差Δzは、始点と終点におけるプローブMPの傾斜の差αN0から容易に求めることができ、これにより、被測定面全体の形状を精度良く求めることができる。即ち、水準器ELで2回傾斜を読み取るのみでゼロ点誤差Δzを得ることができるから、測定時間の短縮を図ることができ、例えば現場等での作業も容易である。
(もっと読む)
鋼材の変位表示方法及びシステム
【課題】鋼材の地中変位を、当該鋼材の挿入過程において、正確に把握することができ、しかも、装置コストが嵩まない鋼材の変位表示方法とする。
【解決手段】傾斜計11を用いて地中に挿入された鋼材2の傾斜情報を取得し、この傾斜情報を用いて鋼材2の変位を算出し、この算出変位を表示する方法であって、鋼材2の挿入に先立って、傾斜計11を鋼材先端部2aに固定し、鋼材2の挿入過程において、連続的に又は所定の深度ごとに傾斜情報を取得し、鋼材2の挿入完了後、傾斜計11を、この傾斜計11に取り付けた線材13を地上から引いて回収する。
(もっと読む)
薄肉部位検出方法及び薄肉部位検出装置
【課題】比較用のデータをあらかじめ準備しておくことなく、薄肉部位の検出が可能な薄肉部位検出方法及び薄肉部位検出装置を提供することを課題とする。
【解決手段】本発明は、壁部表面において厚さが一定の部位naと厚さが不明な部位とに測定点mpがそれぞれ指定され、加熱時及び前記自然冷却時のうち少なくとも一方において測定点毎に温度が時系列に測定され、測定点mp毎の時間と対応した温度データの温度データ群が取得される。この取得された厚さが一定の部位naに指定された測定点spにおける基準データ群と、厚さが不明な部位に指定された測定点cpにおける比較データ群との類似度が導出されこの類似度に基づいて基準データ群が取得された測定点spでの壁部に対する比較データ群が取得された測定点cpでの壁部の薄さの度合いが導出されることで薄肉部位taが検出されることを特徴とする。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】計測点間隔が大きくても変位量を求めることができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ5に支持されたレール3の長さ方向に間隔をおいて設置されている計測傾斜角を計測する複数個の傾斜計6と、レール3の計測点間部分における補間傾斜角を推定する演算装置とを有し、演算装置は、レール3上の点の長さ方向の位置を表す位置値を示す位置軸と、レール3の傾斜角を表す傾斜角値を示す傾斜角軸とからなる位置−傾斜角座標において、計測点の位置値と計測傾斜角の傾斜角値とで表される座標計測点を含み、位置値に対応した傾斜角値を与える予備補間関数を求め、計測点間の位置値と補間傾斜角の傾斜計値とで表される、予備補間関数上の暫定点を補正することによって、暫定点に代わる仮想座標計測点を求め、座標計測点及び仮想座標計測点を含み、位置値に対応した傾斜角値を与える本補間関数を求める。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】傾斜計間の梁状構造の被支持体の長さ方向に対する被支持体の傾斜角を推定することができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ(支持体)5に支持され、1本からなる、又は接合されて1本となる梁状構造のレール(被支持体)3の長さ方向に間隔を空けてレール3に沿って設置されている、レール3の長さ方向に対する傾斜角を測定する複数個の傾斜計6と、この傾斜計6から得られる傾斜角から、傾斜計6,6間毎にレール3の長さ方向に沿った位置に対するレール3の傾斜角を推定する関数を与える演算装置7Bとを有することを特徴とする。
(もっと読む)
角度検出装置
【課題】駆動軸のズレやガタツキ、偏心にも拘わらず回転角度を高精度に検出することができる角度検出装置を得る。
【解決手段】駆動軸4と、回転センサ5と、駆動軸4と回転センサ5のロータ53との間に介在させた回転体3とからなる角度検出装置。回転体3は弾性部15を備えかつピボット軸部16を有し、回転軸Lを中心として回転する。弾性部15は、横断面中央部に貫通孔3bを有し、相互に直交する中実部3cの積み重ね構造となっている。ピボット軸部16はカバー部2bのピボット軸受け32に回転自在に支持され、軸受け部58によってロータ53を介して回転軸L上に位置決めされている。
(もっと読む)
作業車両
【課題】従来、この種のホイールバランスの検査を行う装置は、車両とは別に独立した装置から構成され、検査をする車輪は、車両に装着する前か、又は車両から取り外して検査しなければならない課題があった。
【解決手段】この発明は、上記課題を解決するために、車体1に装備した傾斜センサ2の検出情報に基づいて、該車体1もしくは該車体1に対してローリング自在に連結する作業機を自動的に水平制御する制御装置3を備えた作業車両において、前記傾斜センサ2は、車体1に軸装している車輪4のホイールバランスをチエックするモードを選択すると、前記検出情報を車輪4の偏芯等を判定するチエック情報として利用できる構成とした作業車両の構成とする。
(もっと読む)
角度検出装置及び歩数計
【課題】 加速度センサを用いて構成が簡単で信頼性高く、小型化可能な角度検出装置を提供すること。
【解決手段】 各加速度センサ101a、101bは感度軸が相互に直交するように配置されると共に少なくとも動的加速度を検出して対応する検出信号を出力し、CPU108は加速度センサ101a、101bからの検出信号に基づいて、歩数計の筐体の傾きを算出する。CPU108は、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bを決定して該増幅手段からの検出信号に基づいて歩数計数を行い、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bのゲインを最適化し、利用しない増幅手段106a又は106bのゲインを小さくしてSN比及び歩数演算の精度向上を図る。
(もっと読む)
三次元形状測定方法
【課題】被測定物が非球面形状であっても、極めて高精度に測定データを取得することができる三次元形状測定方法を提供する。
【解決手段】互いに直交するX軸およびY軸方向に駆動される移動体においてZ軸方向に移動自在に支持されたプローブを、被測定物の測定面に、所定の経路に沿って走査させて前記被測定物の形状を測定する三次元形状測定方法であって、測定時にX−Y方向に移動する移動体の移動量を基準として測定データを取得するサンプリングピッチを、被測定物の既得形状情報から得られる走査上の各位置における被測定物の測定面の法線方向に引いた直線と、被測定物の中心線と、が交わる点を中心として、前記表面上の位置で被測定物の表面形状と接する円を近似円とし、その近似円の半径から算出する。これにより、被測定物の表面形状に沿う方向に対して一定のピッチで測定データを取り込むことができる。
(もっと読む)
1 - 20 / 227
[ Back to top ]