
Fターム[2F069NN08]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | A/D変換するもの (85)
Fターム[2F069NN08]に分類される特許
1 - 20 / 85
複数の設備の相対位置を監視するデバイス
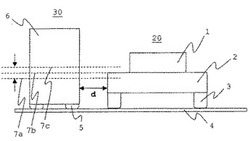
【課題】共通基準システム(4)上に振動隔離機構(2、3、5)を介して搭載され、該共通基準システムに対して変動する位置をとる、リソグラフィ・デバイス(1)及びワークステーション・デバイス(6)を含む装置において、両デバイス間の相対位置の変動を監視して該装置が誤動作しないように調整する。
【解決手段】前記共通基準システムに対する前記リソグラフィ・デバイス及び前記ワークステーション・デバイスの個々の位置を測定する手段と、測定された両デバイスの個々の位置から算出される両デバイス間の相対位置(d、7b)が所定の公差範囲内(7a−7c)にあるかどうかを評価する手段を含む装置。
(もっと読む)
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット

【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
熱間長尺材の長さ測定方法および装置
【課題】熱間圧延後の長尺材がその長さ方向に搬送されつつある時に、その長さを精度良く、しかも安価に、測定することができる、熱間長尺材の長さ測定方法および装置を提供する。
【解決手段】後端センサとしてのロードセル10から搬送ライン下流側に順次所定のセンサ配置間隔で複数のアナログHMD121、122‥‥12nを配置し、最上流側のアナログHMD121を用いて先端検出用の閾値を決定し、該決定した閾値を下流側のアナログHMD122‥‥12nに設定してこれらを先端センサとして用いる。長尺材(鋼管)1の長さは、後端センサ(ロードセル)での後端検出時刻と、その直前に先端検出した先端センサ(アナログHMD)での先端検出時刻と、センサ配置間隔とから算出される。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
座標測定装置ならびに座標測定装置を用いて加工物の幾何形状を測定する方法
【課題】座標測定装置ならびに座標測定装置を用いて測定する方法
【解決手段】本発明は座標測定装置(10)を用いて加工物の幾何形状を測定する方法およびこの装置自体に関する。本発明によれば、測定作業は異なる種類の装置を必要とすることなく最適に実行され、これにより関連作業に対して最適利用である1つまたは複数のセンサを使用できる。
(もっと読む)
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
軌道解析装置、軌道解析方法
【課題】微小な動きから、大きな動きまで正確に検出可能とする軌道解析装置および軌道解析方法を提供する。
【解決手段】物体に固定され、角速度センサーと、少なくとも2個の加速度センサーと、を備える慣性センサーを備える姿勢検出部と、検出データを増幅しA/D変換するデータI/F部と、データを処理する演算部と、演算結果に基づき、前記加速度センサーのどちらか一方の加速度センサーを選択するセンサー制御部と、選択された前記加速度センサーを含む前記慣性センサーからの出力データから姿勢データを生成し、送出する姿勢データ生成部と、を備える姿勢検出装置と、前記姿勢検出装置からの前記姿勢データを解析する解析部と、前記姿勢データおよび解析結果を保存する保存部と、前記解析結果を通知する通知部と、を備える解析装置と、前記姿勢検出装置と前記解析装置との通信手段と、を含む軌道解析装置。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
移動体位置推定検出システム及び移動体位置推定検出方法
【課題】高精度に移動体の位置等を推定、検出することができるシステム等を提供する。
【解決手段】異なる場所にそれぞれ設置されて、移動体により生じる物理量の信号を検出する複数の磁気検出器1と、各磁気検出器1の検出した信号に対応したパラメータの値を最小自乗法により算出し、パラメータの値に基づいて、各磁気検出器1の検出に係る移動体の位置をそれぞれ算出する位置算出器4A及び4Bと、位置算出器4A及び4Bが算出した位置に基づいて、移動体の位置を推定検出する位置推定検出器10とを備える。
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 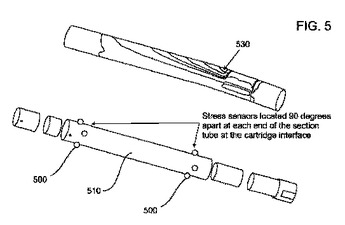 (もっと読む)
(もっと読む)
複数の通信チャネルを有する可搬型の関節アーム座標測定機
反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む、複数の通信チャネルを有する可搬型の関節アーム座標測定機(AACMM)。可搬型のAACMMは、可搬型のAACMMの第1の端部に装着された測定デバイスと、複数の通信チャネルとをさらに含む。可搬型のAACMMは、トランスデューサからの位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路をさらに含む。可搬型のAACMMは、ユーザからの、複数の通信チャネルのうちの選択された1つの通信チャネルを介した通信の要求を受信し、選択された通信チャネルを介して通信するように可搬型のAACMMを構成するために電子回路によって実行可能な論理をさらに含む。  (もっと読む)
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を演算する演算部において、検出結果をより確実に用いることができるように出力することができる技術を提供する。
【解決手段】回転体に取り付けられたギアにより回転力が付与されて回転する第1の従動ギアおよび第2の従動ギアそれぞれの回転角度を検出する第1の回転角度センサおよび第2の回転角度センサと、第1の回転角度センサおよび第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算するECUとを備え、第1の回転角度センサおよび第2の回転角度センサの少なくともいずれかは、検出した回転角度に応じたデューティ比を有するパルス幅変調信号を、立ち上がりエッジおよび立ち下がりエッジのいずれか一方のエッジが予め定められた周期となるように出力するとともに、検出した回転角度に応じた時間に予め定められた時間TPを加算した時間を一方のエッジから他方のエッジまでの時間とする。
(もっと読む)
センサクリアランスの電子的自己校正
【課題】多チャネルクリアランスセンサシステムの自己校正システムを提供する。
【解決手段】自己校正システム110は、固定物体と回転物体との間の少なくとも1つのクリアランスパラメータ信号を測定する少なくとも1つのセンサを有する。このセンサからの出力は、クリアランスパラメータ信号のオフセット誤差を求めるよう構成されたオフセット補正部137により、クリアランスパラメータとして処理され、このパラメータは、レベルシフタ120において用いられる。このレベルシフタは、クリアランスパラメータ信号と切替可能に結合されている。レベルシフタからの出力は、増幅及びデジタル変換可能であり、信号レベル解析器154により処理されて、チャネル利得信号が求められる。
(もっと読む)
測定支援システム及びこれを利用した測定システム
【課題】測定値の正確性や信頼性を担保しつつ、コンピュータに入力されて処理の対象となる測定値の確定に必要な作業時間や労力を削減する。
【解決手段】 測定対象物の特性を測定する測定装置10と、測定装置10の表示部12から測定者が目視で読み取った測定値を入力するマイクロホンセット30と、測定装置10によって測定された測定値を測定者の指示したタイミングで読み取る計測部13、計測部13で読み取られた測定値を一時的に記憶する記憶部21、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値を照合する照合部23、照合の結果、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値が一致した測定値を記録する記録部24、記録部24に記録されたデーから測定結果を求めるデータ処理部40とを備えた携帯情報装置20とから測定システムを構成する。
(もっと読む)
列車位置検出システム
【課題】車上側での簡易且つ高精度の位置検出を実現するとともに、位置検出に要する地上側及び車上側の装置の簡素化を図ること。
【解決手段】走行路3には、深さが異なる3種類のスリット部11A,11B,11Cが形成されたパターンプレート10が配置されている。列車5には、高さ位置が異なることで検出可能なスリット部11の種類が異なる複数の検出器30−1〜30−5が設けられている。そして、車上装置40では、各検出器30による検出信号Fから検出しているスリット部11の種類を判定し、走行路3の特定位置に配置された特定種類のスリット部11の検出によって、列車5が該特定位置に位置していることを検出する。
(もっと読む)
繋ぎ目検出装置及び測長装置
【課題】連続帯状体の表面に検出部を変位可能に接触配置し、変位センサー部は変位信号を出力し、A/D変換部が変位データを出力し、しきい値演算部は変位データを基にしきい値を求め、比較判定部は変位データがしきい値よりも大であるとき判定信号を出力し、繋ぎ目信号出力部は判定信号が出力されたとき繋ぎ目信号を出力し、繋ぎ目検出精度を高めることができる。
【解決手段】繋ぎ目Jに凸部を有してなる連続帯状体Wの表面に接触して変位可能な検出部1を設け、繋ぎ目検出装置において、変位信号を出力する変位センサー部5と、変位信号をデジタル数値化して変位データDを出力するA/D変換部6と、しきい値Tを求めるしきい値演算部7と、変位データがしきい値よりも大であるとき判定信号を出力する比較判定部8と、判定信号が出力されたとき繋ぎ目信号を出力する繋ぎ目信号出力部9とを備えてなる。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
姿勢検出装置の補正パラメーター作成方法、姿勢検出装置の補正パラメーター作成用装置及び姿勢検出装置
【課題】センサーの取付角誤差に起因する検出値の誤差を補正するための補正パラメーターをより低コストで作成可能な姿勢検出装置の補正パラメーター作成方法、補正パラメーター作成用装置及び補正機能付きの姿勢検出装置を提供すること。
【解決手段】回転板230を上面231が水平になるように設置し(S10)、立方体治具210の面211に、X軸(第1の軸)が面212(第2の面)に垂直になり、Y軸(第2の軸)が面213(第3の面)に垂直になり、Z軸(第3の軸)が面211(第1の面)に垂直になるように、姿勢検出装置1を固定する(S12)。そして、立方体治具の面212、213、211と対向する各面を回転板の上面に順次固定し(S14、S20、S26)、回転板を静止又は所定の角速度で回転させて姿勢検出装置の検出値を取得し(S16、S18、S22、S24、S28、S30)、補正パラメーターを作成する(S32)。
(もっと読む)
1 - 20 / 85
[ Back to top ]