
Fターム[2F077TT31]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802)
Fターム[2F077TT31]の下位に属するFターム
2値化 (127)
多値化 (88)
比較器、シュミット回路、差動増幅器を使うもの (198)
ヒステリシス特性を持つもの (13)
可変閾値を用いるもの (13)
レゾルバ−デジタル変換 (154)
シンクロ−デジタル変換 (4)
Fターム[2F077TT31]に分類される特許
81 - 100 / 205
センサ装置並びに入力装置、遊技球発射装置
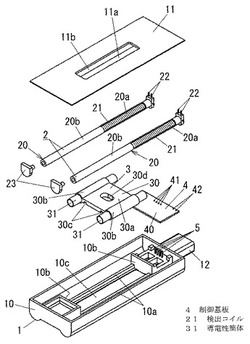
【課題】直線的に変位する検出対象物体の動作パターンに関わらず当該検出対象物体の位置検出が可能なセンサ装置を提供する。
【解決手段】センサ装置は、巻軸方向が所定の直線方向となるように配置される検出コイル21と、検出コイル21の筒内への挿入量が変化するように検出対象物体の変位に応じて上記巻軸方向に移動自在に配置される導電性筒体31と、導電性筒体31の変位に応じた検出コイル21のインダクタンス変化に基づいて検出対象物体の変位に比例した位置信号を出力する制御基板4とを備えている。
(もっと読む)
位置検出装置

【課題】差動トランスによる温度特性の影響を受けずに正しい位置を測定可能な位置検出装置を提供する目的としている。
【解決手段】位置検出装置は、正弦波生成回路101、D/A変換回路102、A/D変換回路103と106と107、比較回路104、補正回路105、LPF回路108と109と114と115、センター値補正回路110と111、全波整流回路112と113、平均化回路116と117、比率演算回路118、位置情報出力回路119から構成されている。
(もっと読む)
異常監視装置
【課題】ラインドライバ形式エンコーダに適用した場合にも、スペースやコストを増加させずに高精度に異常を検出する。
【解決手段】エンコーダ12の出力信号であって位相が異なる複数の信号が、電源線及び信号線を含む配線系統を介しそれぞれ一組の差動信号として制御装置350に入力され、前記差動信号を処理して異常を検出する異常監視装置において、制御装置350は、複数組の差動信号をディジタル信号にそれぞれ変換するラインレシーバ351A,351B、及びカウンタ335A,335B、パルス数比較異常検出部336等からなる第1の異常検出手段と、タイマ338A,338B、パルス幅比較異常検出部340等からなる第2の異常検出手段と、レベル計測手段341A,341B、AD変換部332A,332B、レベル異常検出部333A,333B等からなる第3の異常検出手段と、を備える。
(もっと読む)
角度検出装置
【課題】簡易な構成によりステアリングシャフトの多回転絶対角を検出できるステアリングセンサを提案する。
【解決手段】ステアリングセンサ10は、入力軸61に固定される回転体71と、回転体71の外周付近に対角配置されて、回転体71の回転に伴う磁束変化を検出する磁気センサ21A,21Bと、磁気センサ21A,21Bの検出信号を差動演算する差動演算回路と、差動演算回路が差動演算した結果に基づいて、入力軸61の一回転以内の絶対角を算出する角度算出回路と、入力軸の回転数を検出する磁気センサ31と、入力軸61の一回転以内の絶対角、及び入力軸61の回転数に基づいて、入力軸61の多回転絶対角を演算する演算回路を備える。
(もっと読む)
角度検出装置
【課題】発振回路内の巻線を自励駆動発振させることにより、信号処理回路において励磁巻線および励磁用回路を不要とし、複雑な演算を不要とし、回路規模を縮小して安価で高信頼性な角度検出装置を得る。
【解決手段】複数の巻線L1〜L4の各々と個別の抵抗R1〜R4とが直列接続されてパルス信号P1〜P4を生成する複数の発振回路1、3、2、4と、複数の発振回路を個別に発振駆動する駆動回路と、各パルス信号P1〜P4に基づいて複数の巻線L1〜L4のインダクタンス比を検出する信号処理回路とを備えている。駆動回路は、複数の発振回路のうちの1つの巻線および抵抗の分圧電圧が所定値に達した時点で、隣接する他の発振回路を発振駆動させる。
(もっと読む)
正弦波エンコーディング装置及びエンコーディング方法
【課題】本発明は、正弦波のいかなる2つの点の間の位置差を正確に求めることができる正弦波エンコーディング装置及びエンコーディング方法を提供することを目的とする。
【解決手段】本発明に係る正弦波エンコーディング装置は、エンコーダーと、プロセッサーと、エンコーダーとプロセッサーとの間に接続されているコンバーターと、を備え、エンコーダーから出力する位相差が90度である2つの正弦波の第一測定点と第二測定点との間の距離を計算することに用いられ、コンバーターは、エンコーダーから出力する2つの正弦波の各点の振幅値をプロセッサーに伝送し、プロセッサーのデータ処理ユニット、区間判定ユニット及び位置記録計算ユニットによって、前記2つの正弦波の対応する振幅値に対して処理してから、前記2つの正弦波の第一測定点と第二測定点との間の位置差を獲得する。
(もっと読む)
多相回転電気機器の角度位置測定センサの機能故障を診断する方法および装置
本発明は、オルタネータ兼スタータのロータ角度位置測定センサ(10)の故障を診断する方法、および装置(4)に関する。センサ(10)は、多相信号(100〜103)を出力する。センサ(10)が出力する信号(100〜103)の線形結合によって、2つのシヌソイド信号(200、201)が生成され、それらは、非自明に位相がずれている。本発明の方法によれば、不等式の2つの複合対応が、前述の2つの信号(200、201)および初期段階中に計算された閾値から計算される。第1の閾値は、ロータ角度位置測定システム(1)の数学モデルにモンテカルロ法を適用することによって計算され、他の2つは、2つのシヌソイド信号(100〜103)に加えられるオフセット値(30〜32)から計算される。前述の対応の一方および/または他方の「真」の論理状態は、少なくとも1つのセンサが所定の種類の故障を有することを示す。  (もっと読む)
(もっと読む)
角度検出装置
【課題】磁石とホール素子との相対位置に関する要求精度や環境温度に係る制約を緩和し、磁石とホール素子の配置に関する自由度を確保しつつ、高精度な角度検出装置を得る。
【解決手段】互いに直交する向きに配置された1対のホール素子110および120からの出力信号に基づいて、磁界中における基準位置からの回転角変位に応じた値の角度検出出力を得るについて、ホール起電力信号のレベルをゲイン制御ループ300によって規格化することによりホール起電力信号のレベルのばらつきに関する制約を緩和する一方、角度検出ループ200によって、ホール素子110および120からのホール起電力信号を△Σ変調した信号に基づいて、量子化ノイズを高域にシフトさせた上、ローパスフィルタとして機能するループフィルタ回路214で信号を取り出すことにより高精度の角度検出出力を得る。
(もっと読む)
異常監視装置
【課題】従来技術では対応不可能な各種の異常を検出可能として信頼性を高め、マイコンが有する機能を利用して安価な異常監視装置を提供する。
【解決手段】エンコーダ10からの二相の位置検出信号が、ケーブル20等の配線系統を介しアナログ信号として制御装置30に入力される。制御装置30内のマイコン33は、アナログ入力信号の電圧レベルが所定の範囲内に存在する場合に、エンコーダや配線系統の異常を検出するレベル異常検出手段333A,333Bと、二相のアナログ入力信号に対応するディジタル信号のパルス数の差が所定の閾値以上である場合に、エンコーダ等の異常を検出するパルス数比較異常検出手段336と、二相のディジタル信号の合成信号のパルス幅が過去の制御周期のパルス幅と異なることによりエンコーダ等の異常を検出するパルス幅比較異常検出手段339と、を備える。
(もっと読む)
誤りのあるセンサ出力を特定するための方法及び装置
【課題】誤りのあるセンサ出力を特定するための方法及び装置を提供する。
【解決手段】誤りのあるセンサ出力を特定するための方法が提供される。本方法は、或る時間にわたって、センサから第1の複数のサンプルを得ることを含む。複数のサンプルの平均を求める。第1の複数のサンプルが得られた時刻より後の時刻においてセンサから第1のさらなるサンプルも受信する。第1のさらなるサンプルと平均との相違を求める。相違が或るしきい値よりも大きいときに、第1のさらなるサンプルを誤りがあると特定する。
(もっと読む)
角度誤差低減
【課題】2次元アナログ信号Vx,Vyからその角度成分θを検出する角度検出AD変換において、角度検出AD変換回路に入力される信号が有するオフセット又はゲインミスマッチに起因して発生する角度検出AD変換回路の精度劣化を低減する、安価で高精度な角度検出AD変換器及び角度検出AD変換方法を提供する。
【解決手段】本発明の角度検出AD変換器は、被測定磁場の方向を少なくとも2個の磁気センサにより基準位置からの角度として検出する角度検出AD変換器において、直交系の2次元平面上の2軸であるX軸およびY軸に沿って配設され、前記被測定磁場を検出する2つの磁気センサの出力信号をそれぞれX成分とY成分とする出力信号値を直交変換する座標系変換部と、前記出力信号値から算出した角度と、前記座標系変換部で直交変換された変換信号値から算出した角度とから、前記被測定磁場の角度を算出する角度算出部とを備えたことを特徴とする。
(もっと読む)
故障検出装置及び故障検出方法
【課題】センサの故障検出を確実に行うことができる故障検出装置及び故障検出方法を提供する。
【解決手段】加速度センサの故障の有無を検出するECUは、センサ電源から加速度センサに対して故障の有無を検出するために入力される入力電圧の電圧値Vinのばらつきの上限値V1及び下限値V2を考慮して、そのような入力電圧が加速度センサに入力された場合に加速度センサから出力される出力電圧の電圧値Voutを推定する。そして、その入力電圧の電圧値Vinのばらつきの上限値V1及び下限値V2に対応した出力電圧の電圧値Voutを閾値として加速度センサが故障しているか否かを判定する際の判定基準となる判定条件を設定する。続いて、ECUは、加速度センサから出力される出力電圧の電圧値Voutを計測し、計測された出力電圧の電圧値Voutを予め設定された判定条件に照合することにより、加速度センサが故障しているか否かを判定する。
(もっと読む)
コントローラおよび加工装置
【課題】高速で運動する物体の位置の検出および/または制御に有利な技術を提供する。
【解決手段】エンコーダから提供される互いに位相が異なる2つの周期信号に基づいて物体の位置を検出しながら前記物体の駆動を制御するための駆動指令を発生するコントローラは、前記2つの周期信号のいずれか一方の周期をカウントするカウンタと、前記2つの周期信号の値の比のアークタンジェント値と前記カウンタから提供されるカウント値とに基づいて前記物体の位置を検出し、その位置に基づいて前記駆動指令を発生する演算部とを備える。前記演算部は、前記アークタンジェント値と前記カウント値とに基づいて計算される前記物体の加速度と過去に発生した前記駆動指令とに基づいて前記カウント値の誤りを補正し、その補正されたカウント値に基づいて前記物体の位置を計算する。
(もっと読む)
処理装置
【課題】高速に、振幅変調性のノイズの影響を補正可能な位置または角度の演算方法の提供。
【解決手段】信号処理装置SPは、第1演算部10にて検出装置から提供される第1正位相信号A、第1逆位相信号A’、第1正位相信号Aに対して位相が異なる第2正位相信号B、および、第2逆位相信号B’からコサイン信号(A−A’)/(A+A’)とサイン信号(B−B’)/(B+B’)を算出し、第2演算部20にて前記コサイン信号および前記サイン信号に誤差補正処理をし、検出対象物の位置又は角度を演算・誤差補正する構成とする。
(もっと読む)
回転角度検出システム
【課題】従来の回転角度検出システムは、制御側に配置された回路と駆動側に配置された回路とを複数本の伝送線で接続する必要があるので、伝送線の接続が煩雑となっている。
【解決手段】本発明による回転角度検出システムでは、駆動側の電力線2に駆動側信号処理回路15を設け、駆動側パラレル/シリアル変換器5が出力するシリアル角度信号5aをリファレンス信号1aに重畳して制御側に伝送する。また、制御側の電力線2に制御側信号処理回路16を設け、リファレンス信号1aからシリアル角度信号5aを抽出する。
(もっと読む)
位置検出装置
【課題】より高精度に位置検出を行うことができる位置検出装置を提供する。
【解決手段】減算器8からの数値DCAと、乗算器16からの数値DCBは、それぞれ2次高調波生成器29,30に入力される。2次高調波生成器29,30内では、数値DCA,DCBの自乗演算により、信号DC,DSに同期した2次高調波に相当する数値DCB2,DSB2をそれぞれ出力する。乗算器33,34では、記憶器31,32が記憶する数値DC2J,DS2Jとそれぞれ乗算され、信号DC,DSに含まれる2次高調波とほぼ等しい数値DC2,DS2に振幅調整される。減算器35,36では、数値DCA,DSCからそれぞれ数値DC2,DS2が除去され、数値DCB,DSDとして出力される。数値DCBとDSDは、内挿演算器17により、回転軸1の高精密な回転量を示す位置信号IPに変換される。
(もっと読む)
センサ装置
【課題】ECU装置と一対の通信線を介し、ECU装置を主とする相互通信の構築及びセンサ装置への電力供給を可能とするセンサ装置であっても、検出精度を向上させたビット固着検出が可能なセンサ装置を提供する。
【解決手段】センサ装置3は、センサ21が出力したのと同様の信号を疑似信号として生成する疑似信号生成手段と、A/D変換器11への入力をセンサ21の出力信号と疑似信号生成手段の疑似信号とで切替える切替え手段と、切替え手段による切替えを介して疑似信号生成手段の疑似信号をA/D変換器11へ入力すると共に、A/Dレジスタ11bよりA/D変換後のデジタル値を読み出し、疑似信号に対応する所定範囲内の値か否かを判定することでA/Dレジスタ11bのビット異常を検出するビット異常検出手段とを備える。
(もっと読む)
電磁誘導式位置検出器及び電磁誘導式位置検出方法
【課題】誘起電圧Vの角周波数ωと同じ角周波数のノイズがVに加わっている場合でも、SN比を向上させて位置検出器の安定化を図ることができる電磁誘導式位置検出器及び電磁誘導式位置検出方法を提供する。
【解決手段】第1及び第2スライダ側コイルに励磁電流Ic,Isを流し、スケール側コイルに発生する誘起電圧VをAD変換してサンプリング周期T、サンプリング点数Nでサンプリングし、このサンプリングデータに基づきVの位相βを検出し、Vのω成分の拡散フーリエ係数をCとし、C=|C|exp(jΦ)における位相Φ=tan-1(lm(C)/Re(C))として、前記サンプリングデータに基づきFFT処理を行なうことによりωの信号成分の振幅|C|と位相Φを求め、|C|とΦとNとβとに基づいて振幅のβ方向への斜影Vsを求め、Vsが0になるように励振位置αを調整し、αに基づいてIs,Icを調整して、Vsが0となるαを検出位置Xとするという処理を行なう。
(もっと読む)
リニアエンコーダ信号処理装置および信号処理方法
【課題】センサ信号の歪みによる誤差あるいは永久磁石の寸法や配置のばらつきがあっても、精度良く位置算出を行う。
【解決手段】エンコーダ調整時に内挿誤差算出部11によりポールピッチに関する内挿誤差補正用パラメータおよびシフト誤差算出部12によりシフト誤差補正用パラメータを算出し、記憶させておき、エンコーダ実動作時にこれらのパラメータを使用して内挿誤差補正部6にて内挿誤差およびシフト誤差補正部8にて起点ズレおよび内挿分割幅を補正し絶対位置を生成する。
(もっと読む)
電磁誘導式位置検出器及び電磁誘導式位置検出方法
【課題】ギャップ調整作業を容易且つ効率的に行うことができる電磁誘導式位置検出器及び電磁誘導式位置検出方法を提供する。
【解決手段】位置検出時には、第1スライダ側コイルに第1励磁電流Is=I・cos(kα)・sin(ωt)を流し、第2スライダ側コイルに第2励磁電流Ic=−I・sin(kα)・sin(ωt)を流すことにより、スケール側コイルに誘起電圧V=K(g(X))・I・sin(k(X−α)・sin(ωt)を発生させ、この誘起電圧Vに基づいてスライダの移動位置Xを求め、ギャップ調整時には、第1スライダ側コイルに第1励磁電流Is´=I・cos(ωt)を流し、第2スライダ側コイルに第2励磁電流Ic´=I・sin(ωt)を流すことにより、スケール側コイルに誘起電圧V´=K(g(X))・I・sin(ωt+kX)を発生させて、この誘起電圧V´の振幅値K(g(X))・Iを得る構成とする。
(もっと読む)
81 - 100 / 205
[ Back to top ]