
Fターム[2F077TT31]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802)
Fターム[2F077TT31]の下位に属するFターム
2値化 (127)
多値化 (88)
比較器、シュミット回路、差動増幅器を使うもの (198)
ヒステリシス特性を持つもの (13)
可変閾値を用いるもの (13)
レゾルバ−デジタル変換 (154)
シンクロ−デジタル変換 (4)
Fターム[2F077TT31]に分類される特許
141 - 160 / 205
測定増幅装置および方法
本発明は、両極性矩形供給電圧(US)がそれに供給される測定ブリッジ(10)の離調を検出するための、測定増幅方法および装置に関し、前記方法および装置は、積分A/D変換器を使用する。本発明は、A/D変換に使用される基準電圧(Uref)が、供給電圧(US)の極性逆転と同期した極性逆転に供されることを特徴とする。偶数の個別測定値を合計することによって、オフセットおよびドリフトが全体的に消去される。  (もっと読む)
(もっと読む)
位置センサ

【課題】簡単な構成で安価且つ低消費電力であり且つ応答性の高い回転角度センサを提供する。
【解決手段】磁界発生部材18の相対回転に伴って発生させられた相互の位相差が90度である一対の第1ブリッジ出力信号Xおよび第2ブリッジ出力信号Yの絶対値である|X|および|Y|をそれぞれ算出するとともにそれらの加算値|X|+|Y|を算出し、その加算値|X|+|Y|に基づいて前記三角波出力信号Sの振幅を予め設定された基準電圧値eiとしてその三角波出力信号Sの波形を整形することから、波形整形された一定振幅の正確な三角波出力信号Sが出力されるので、その三角波出力信号Sから磁界発生部材の回転角を、複雑な三角関数式を用いないで比較的簡単な一次式により算出できる。したがって、正弦波が出力される従来の回転角度センサに比較して、構造が簡単となるので安価且つ低消費電力となるとともに、応答性が高い回転角度センサが得られる。
(もっと読む)
回転角度検出装置

【課題】 磁石の磁極数が増えてばらつきによる影響が複雑化しても、回転角度を正確に検出できるようにする。
【解決手段】 回転方向に複数の磁極を有する磁石と、この磁石を検出してその磁界の強さに応じた信号を出力するセンサとを備えると共に、センサからの検出信号に基づいて回転体の回転角度を算出する演算装置を備える。
演算装置は、対象となる回転体が1回転する間の検出信号A1,B1を磁石の磁極数と同数の区間に区分して、各区間における最大値又は最小値を記憶する記憶手段と、各区間における検出信号A1,B1をその区間に対応して記憶された最大値又は最小値で補正する補正手段と、補正された検出信号A2,B2を用いて回転角度Cを算出する算出手段とを備える。
(もっと読む)
エンコーダシステム
【課題】小型のロータリーエンコーダで、高分解能かつ耐ノイズ性に優れたエンコーダシステムを提供する。
【解決手段】モータの回転軸に取付けられ、正弦波、余弦波のアナログ電圧信号1aを発生するエンコーダ3からの情報に基づき、モータをサーボアンプ8で駆動するシステムにおいて、アナログ電圧信号1aをディジタル信号に変換するADコンバータ2と、変換されたディジタルデータをシリアルデータとしてサーボアンプ8に伝送するシリアル伝送手段4と、シリアルデータから位置情報あるいは計数情報を出力するデータ処理部7とを備え、データ処理部7に、ディジタルデータに変換された正弦波、余弦波情報を高分解能化する内挿処理手段6を有し、データ処理部7をサーボアンプ8に設ける。
(もっと読む)
エンコーダ及び電動機の制御装置
【課題】エンコーダに故障予知等に有用なデータの提供。
【解決手段】制御装置内の“特性値算出”のブロックで、エンコーダから入力光される2相正弦波信号についての特性値(2相正弦波信号の各相の振幅値、オフセット値、波形歪、位相差等)が算出され、“アラーム検出”のブロックで予め設定された許容範囲からの逸脱の有無がチェックされ、逸脱があればアラーム表示等が行なわれる。“特性値比較”のブロックは「現在の特性値」が入力される都度、「過去の特性値」と比較し、比較結果を解析する。各過去データと現在値との差を計算し、最大変動量(正負の符号付き)を求め、それが予め設定した値を越えたならば、「異常の予兆」を表わす信号を出力する。エンコーダ基準信号から計算される特性値と比較する方式もある。また、特性値の監視、比較をエンコーダ内で行なうこともできる。
(もっと読む)
位置検出システム、位置検出システムを用いた光学系と撮像装置
【課題】複数の磁気式の位置検出装置を近接して配置しても、磁場の位置検出精度への相互干渉を抑えることができ、高精度かつ小型である位置検出システムを提供する事にある。
【解決手段】各位置検出装置の磁石の着磁方向ベクトルが同一平面上になく、かつ着磁方向ベクトルが直交化方向成分を有する様に磁石を配置し、動く磁石の着磁方向ベクトルの移動方向が他方の磁石の着磁方向ベクトルの対称面に含まれる様にする。同時に磁気センサが他方の着磁方向ベクトルの直交成分を検出できるようにする事が好ましい。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】時間遅れによる誤差が無い回転検出装置、及びこの回転検出装置を組み込んだ検出装置付き軸受を提供する。
【解決手段】回転側部材に、その回転中心周りの円周方向異方性を有する磁石2を設ける。この磁石2に対し前記回転側部材の回転中心の軸方向に対向して、複数の磁気センサ素子が平面的に並ぶ磁気センサ5を固定側部材に配置する。この磁気センサ5の各磁気センサ素子の出力から前記磁石2の磁界強度を計測し、その計測値を基に回転側部材の回転角度を検出する角度算出手段6を設ける。前記磁石2の磁界が磁気センサ素子で検出されてから前記角度算出手段6で検出角度が出力されるまでの遅延時間を補正する遅延時間補正手段7と、磁界のサンプリング間隔を補間して角度の変化分を演算する補間手段8を設ける。また、これら遅延時間補正手段7による遅延時間補正、および補間手段8による補間処理がされた回転角度を出力する出力手段9を設ける。
(もっと読む)
オフセットを受けるセンサ信号を処理するための方法及びその方法を実行するために設計されるセンサ装置
【課題】
【解決手段】 本方法では、増幅前に、変調(1)の結果として、各測定サイクルのn個の位相のセンサ信号が負の数学符号で重み付けされ、その測定サイクルの残りのn個の位相のセンサ信号が正の数学符号で重み付けされる。増幅前に、2つの位相のセンサ信号から平均したオフセットが、異なる数学符号で重み付けされ、変調(1)後に同じ数学符号のオフセットを有する位相のうちの各場合の2つのセンサ信号から減算される。人工的に生成されたオフセットが、前記増幅器(9)の下流の復調(3)、及び各測定サイクルのデジタル化された信号の合算によって再び除去される。
(もっと読む)
エンコーダの出力信号の振幅算出装置及びエンコーダの出力信号の振幅算出プログラム
【課題】エンコーダの出力からリサージュ半径を計算する装置の回路規模を小さくすること、及びリサージュ半径を計算するソフトウェアによる演算時間を短縮する。
【解決手段】エンコーダの出力信号の振幅算出装置又は振幅算出プログラムであって、リサージュ波形を所定数の角度エリアに分割し、分割された各角度エリアに対応してA相の係数αとB相の係数βを予め定めて記憶し、この場合、係数は理論的リサージュ波形の半径にαA+βBを近似するように定められており、リサージュ波形の半径をαA+βBとして算出し、算出された半径をエンコーダの出力信号の振幅とするか、又は象限nの位相角θを象限1の位相角θ’に変換し、リサージュ波形の半径をα|A|+β|B|として算出する。
(もっと読む)
位置検出方法及び撮像装置
【課題】 MR素子から出力される正弦波信号の計測誤差を等しくし、正確な位置検出を行うことができる位置検出方法及びその位置検出方法を適用した撮像装置を提供する。
【解決手段】 MR素子から出力される、位相角が90度異なる正弦波信号を正弦波信号周期の2のべき乗分の1の所定のサンプリング周期でサンプリングし、そのサンプル値の最大値MAXDSA,MAXDSBと最小値MINDSA,MINDSBを用いて、2つの正弦波信号のオフセット値を示す初期化パラメータC,Dを算出する。
(もっと読む)
デジタルスケールの出力信号補正装置及び出力信号補正方法
【課題】エンコーダの2相正弦波信号のオフセット、ゲイン、位相を正確に検出、補正するデジタルスケール出力信号補正装置を提供する。
【解決手段】正弦波に近い2相信号のatctan変換値をパラメータとして、6個以上の多数のデータを用いることにより、2相信号のそれぞれのオフセット、ゲイン、位相の誤差を求め、オフセット加算と一次変換により、補正を行う。
(もっと読む)
絶対位置検出器
【課題】絶対位置検出の異常検出機能を備え短時間で高速応答可能な絶対位置検出器を提供する。
【解決手段】検出データ有効処理部103は有効とした連続する検出素子の検出データをコードデータCSGとしてコード比較部104へ送出する。絶対位置コード導出部101は有効ビット指令部110からの指令信号SRBを入力し、検出データ処理部102から出力される絶対位置データθに基づいて、且つ有効としたビットを指定する信号SRBに従って有効とすべき検出素子にて検出されるであろうコードに対応したコードデータKSGを導出し、コード比較部104へ出力する。コード比較部104ではコードデータCSGとコードデータKSGを比較し一致及び不一致に関する情報を異常判定部105へ送出する。異常判定部105では、一致及び不一致に関する情報がある一定の条件を満たしていた場合に、絶対位置検出に異常が発生したことを示す信号ERRを出力する。
(もっと読む)
レゾルバ角度検出における補償方法及びこれを用いた角度検出装置
【課題】励磁信号から生成される基準交流信号が、周期が変化したり、オフセットが重畳されてしまった場合でも、これらの変化を補償し、レゾルバ信号を適切な頂点のタイミングでサンプリングして出力正弦波及び余弦波の包略線を取得し、これに基づいて回転機の回転角度を検出する方法及びこれを用いた回転角度検出装置を提供することを目的とする。
【解決手段】本発明は、基準交流信号をレゾルバ70に入力してレゾルバ信号を生成し、該レゾルバ信号を所定のタイミングでサンプリングした値に基づいて回転機の回転角度を検出する方法であって、
前記所定のタイミングは、所定周期前までの前記基準交流信号に基づいて定めることを特徴とする。
(もっと読む)
センサ・アダプタおよび方法
入力に接続された変換回路であって、入力に接続された入力デバイスの入力特性を受信し、受信した入力特性に応答して変化するパルス幅を有するパルス幅信号を発生する変換回路と、出力および変換回路に接続された出力回路であって、パルス幅信号を受信し、パルス幅信号のパルス幅に応答して変化する特性を出力において与える出力回路と、を有し、出力特性は、入力デバイスとは異なる合成デバイスの特性に対応する電子アダプタ・アセンブリおよび方法。 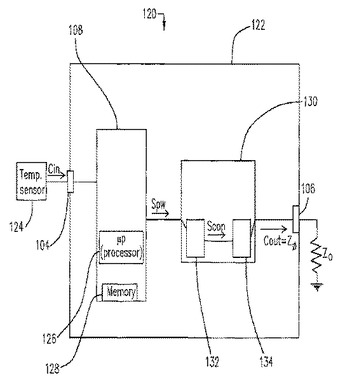 (もっと読む)
(もっと読む)
位置検出方法及び撮像装置
【課題】 MR素子から出力される正弦波信号の歪みの影響を軽減し、より正確な位置検出を行うことができる位置検出方法及びその位置検出方法を適用した撮像装置を提供する。
【解決手段】 MR素子から出力される、位相角が90度異なる正弦波信号を所定サンプリング周期でサンプリングし、そのサンプル値に基づいて2つの正弦波信号の変化率を示す変化率パラメータRSA及びRSBを算出する。変化率パラメータの絶対値の差が所定値より小さくなったときのサンプル値を用いて、2つの正弦波信号のオフセット値を示す初期化パラメータB,Cを算出する。
(もっと読む)
回転角度検出装置
【課題】回転角度を検出するに際してその検出精度を確保することができ、しかも、例えばその角度検出の際に用いる正弦波信号及び余弦波信号を回転角度検出装置以外の他の機器で用いた場合であっても、その共用先の機器がこれら正弦波信号及び余弦波信号を用いて処理を行う際に、その処理精度についても確保することができる回転角度検出装置を提供する。
【解決手段】第1従動ギア3の回転を検出する第1磁気抵抗素子5は、角度変位に対して出力が正弦波をとる第1正弦波信号Vs1と、角度変位に対して出力が余弦波をとる第1余弦波信号Vc1とをCPU9に出力する。CPU9はフーリエ変換及び逆フーリエ変換を用いてこれら信号Vs1,Vc1を補正し、補正後の信号Vs1,Vc1から逆正接Arctanθaを算出してこれを第1従動ギア3のギア角θaとして認識する。CPU9はギア角θaを用いて、主動ギア2のギア角θx、即ちステアリングホイールの操舵角度を算出する。
(もっと読む)
3自由度回転検出装置及びその方法
【課題】磁界を検出するセンサの配置が制約を受けることなく、3自由度方向の回転角度が検出可能な3自由度回転検出装置を提供する。
【解決手段】3自由度回転に関して非対称性をもつ磁界を付与する磁石20A,20Bが設けられた回転体10と、回転体10から離隔し、かつ、所定の位置関係にある複数の磁電変換素子40A〜40Dにより、磁界を検出し、検出磁界から磁電変換素子40A〜40Dに対する回転体10の3自由度方向の回転角度を決定する構成とした。これによれば、磁電変換素子に対して3自由度回転する被検出体の3自由度方向の回転を非接触で一意に特定できる。
(もっと読む)
レゾルバ信号処理装置
【課題】励磁信号をレゾルバに与えるときの制御部の負担が軽く、また、高速化と低コスト化に寄与できるレゾルバ信号処理装置を提供する。
【解決手段】レゾルバ信号処理装置は、制御部1とレゾルバ2と入出力部3とを備え、制御部1は、2周期分の正弦波データを記憶するメモリと、レゾルバ2に対して正弦波からなる励磁信号を送信するDMAコントローラと、を備えている。制御部1に設けられる演算部10は、初期設定時において、励磁信号として基準位相からの1周期分の正弦波データをDMA転送する指令を出し、回転角検出時において、励磁信号として修正位相からの1周期分の正弦波データをDMA転送する指令を出す。修正位相は、初期設定時において、励磁信号と正弦波出力信号又は余弦波出力信号との位相ズレとレゾルバの回転角度とに基づいて求められる。
(もっと読む)
エンコーダのオフセット補正回路
【課題】サンプリング周期の長さやオフセットの大きさに関わらず、正しいオフセット量を得る。
【解決手段】位相が90度異なる第1相(A)と第2相(B)の信号を同一タイミングでサンプリングし、A/D変換したデジタル信号に基づき角度信号を検出するエンコーダで、第1相のA/D変換値(AD)が第1値(XA)の近傍の場合の第2の相のA/D変換値(BD)を用いて第2相(B)のオフセット値(Bofs)を求め、第2相のA/D変換値(BD)が第2値(XB)の近傍の場合の第1相のA/D変換値(AD)を用いて第1相(A)のオフセット値(Aofs)を求め、次回の第1及び第2オフセット値(Aofs)(Bofs)の算出時に、第1値(XA)には今回求めた第1オフセット値(Aofs)を用い、第2値(XB)には今回求めた第2オフセット値(Bofs)を用いるオフセット検出回路と、第1及び第2オフセット値(Aofs)(Bofs)を用いて第1及び第2相信号のオフセットを補正する。
(もっと読む)
位置検出装置、位置検出方法及び画像形成装置
【課題】 エンコーダ等の位置検出器の2相アナログ出力信号を使用した内挿演算値と、2値化信号を使用した4逓倍カウンタの値から高分解能な位置もしくは角度を検出することに加えて、高分解能な位置もしくは角度の誤差をなくす位置検出装置および位置検出方法、それらを搭載した画像形成装置を提供する。
【解決手段】 この位置検出装置200は、モータ201の回転角度を検出するエンコーダ202と、アナログ信号A、Bを2値化する2値化回路203と、パルス信号A−pulse、B−pulseのエッジを計数するアップダウンカウンタ204と、アナログ信号A、Bをデジタル信号に変換するA/Dコンバータ206と、A−pulse、B−pulseの2値の状態を取得するI/Oポート205と、各信号に基づいて内挿演算、位相検出及び位相補償を演算する演算器210と、を備えて構成される。
(もっと読む)
141 - 160 / 205
[ Back to top ]