
Fターム[2F077TT31]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802)
Fターム[2F077TT31]の下位に属するFターム
2値化 (127)
多値化 (88)
比較器、シュミット回路、差動増幅器を使うもの (198)
ヒステリシス特性を持つもの (13)
可変閾値を用いるもの (13)
レゾルバ−デジタル変換 (154)
シンクロ−デジタル変換 (4)
Fターム[2F077TT31]に分類される特許
101 - 120 / 205
直線移動量検出装置

【課題】直線方向の移動量を直接検出できる高精度で安価な直線移動量検出装置を提供する。
【解決手段】固定部10に対して、所定範囲Dxで直線移動する可動部20の移動量Xを検出する直線移動量検出装置101であって、固定部10または可動部20のいずれか一方に配置され、所定磁界Ba,Bbを発生する磁石20a,20bと、固定部10または可動部20のもう一方に、直線移動するX方向で所定間隔Lを置いて平行に配置される2個のホール素子10a,10bとを有してなり、2個のホール素子10a,10bの出力が、それぞれ、直線移動する所定範囲Dxにおいてsin関数またはcos関数で近似され、所定の位相差αを持つように、所定磁界Ba,Bbと所定間隔Lが設定されてなり、2個のホール素子10a,10bの出力と位相差αを演算して、可動部20の移動量Xを検出する。
(もっと読む)
レゾルバ異常検出方法及び該方法を用いた制御システム

【課題】
レゾルバの異常検出に留まらず、そのシステムに及ぼす影響が重大化否かを判断してシステムの可用性を高める技術を提供することを目的とする。
【解決手段】
上記目的を達成するために本発明では以下の手段を講じる。(1)レゾルバからの信号の振幅を監視し、sinθ2+cosθ2の値が1より外れていないかと監視する。(2)(1)で、sinθ2+cosθ2の値が1より外れている場合には、sinθ,cosθをそれぞれ直交座標上に、座標(sinθ,cosθ)をプロットし、所定の時間内に4つの象限すべてに座標(sinθ,cosθ)のプロットが存在する場合には正常、そうでない場合には異常とみなしモータ駆動禁止とする。
(もっと読む)
リニアスケール
【課題】目盛幅よりも小さい刻み幅単位でも、可動部の位置を簡易に且つ精度よく検出することができるリニアスケールを提供する。
【解決手段】リニアスケールは、定盤に設けられ目盛を有するスケールテープと、テーブルに設けられ目盛との位置関係に応じた信号を取得するスケールヘッドと、を備えている。このリニアスケールでは、スケールヘッドで取得された信号に基づいてカウントする複数のカウンタ部が設けられ、これらカウンタ部のカウント計数N1,N2が互いにオフセットするようにカウント初期値I1,I2が設定されている。そして、目盛幅よりも小さい刻み幅単位の位置Pb,Pdが、カウント計数N2が基準数の整数倍のときに検出される。
(もっと読む)
レゾルバ信号処理装置および操舵装置
【課題】増幅手段への印加電圧が低下する場合でも回転角の検出精度の低下を抑制し得るレゾルバ信号処理装置および操舵装置を提供する。
【解決手段】レゾルバ信号処理装置として機能するECU40では、バッテリBの電源電圧Vbが閾値電圧Vp以下になると、ゲインGを電源電圧Vbの低減に応じて低減させることにより、モータ32のモータ回転角θmを検出するレゾルバ33に入力される励磁信号の振幅を、電源電圧Vbの低減に応じて低減する。
(もっと読む)
レゾルバインタフェース、レゾルバからの入力信号を監視する方法、および差動位置センサインタフェース
【課題】動作環境に関わらず、正確な直交座標位置を示すことができるレゾルバインタフェースを設計および開発する。
【解決手段】レゾルバインタフェースが、正弦信号および余弦信号についての別個のアンチエイリアシングフィルタを含む。別々にフィルタリングされた信号は、時分割変換されてアナログ−デジタル(A/D)コンバータに送られる。すべての入力が同一のA/Dコンバータを介して供給されるので、このA/Dコンバータによって生じる誤差、相違ないしシフトは、すべての入力に亘って共通のものとなる。フィールド・プログラマブル・ゲート・アレイ(FPGA)およびプロセッサを使用して、デジタルフィルタリング、復調、および位置の算出を行う。
(もっと読む)
直線位置検出器用受信回路
【課題】本発明は、変換回路から得られる和電圧と差電圧を、R/D変換器を用いることなくCPUに入力させて低コストで直線位置検出信号を得ることを目的とする。
【解決手段】本発明による直線位置検出器用受信回路は、複数のオペアンプ(5〜8)からなる変換回路(9)とCPU(12)との間に一対の整流・平滑回路(20,21)及び一対のA/D変換器(22,23)を設け、直線位置検出器(1)から変換して得た和電圧(VA+VB)と差電圧(VA−VB)は、整流・平滑されてデジタル化された後にCPU(12)で直線位置検出信号(13)が得られる構成である。
(もっと読む)
エンコーダの誤差補正方法
【課題】初期のオフセット調整環境と異なる温度環境でエンコーダが使用された場合であっても、それに起因するオフセット誤差を補正する。
【解決手段】可動被検出物の変位に対応してA相センサから出力される正弦波状のA相信号と、可動被検出物の変位に対応してB相センサから出力される正弦波状のB相信号と、を解析することによって可動被検出物の変位の絶対値を検出するエンコーダの誤差補正方法において、A相信号とB相信号は位相差が略π/2であって、A相信号とB相信号からXY平面上のリサージュ波形を算出する第1ステップと、リサージュ波形をもとに、リサージュ波形の円周上とX軸で交差する2点の各々の近傍と、リサージュ波形の円周上とY軸で交差する2点の各々の近傍の4点を特定する第2ステップと、X軸近傍の2点及びY軸近傍の2点がそれぞれX軸とY軸の交点から略等距離になるように、A相信号とB相信号の一方又は両方にオフセット値を加減して、誤差を補正する第3ステップと、を含む。
(もっと読む)
エンコーダの誤差補正方法
【課題】分解能変換等の処理を行った場合であっても、出力パルスの精度低下を防ぐことが可能な出力パルスの補正方法を提供する。
【解決手段】可動被検出物の変位に対応して、A相センサから出力される正弦波状のA相信号と、B相センサから出力される正弦波状のB相信号と、を解析することによって可動被検出物の変位の絶対値を検出し、その絶対値に基づきパルス発生回路14から出力される出力パルスの補正方法において、パルス発生回路14の入力値の整数部分を累積加算する第1ステップと、第1ステップの出力値に、2の整数乗からなる分解能変換値を乗ずる第2ステップと、絶対値から、第2ステップの出力値を減算する第3ステップと、第3ステップの出力値を分解能変換値で除算する第4ステップと、第4ステップの出力値の整数部分をパルス発生回路14に入力する第5ステップと、を含む。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 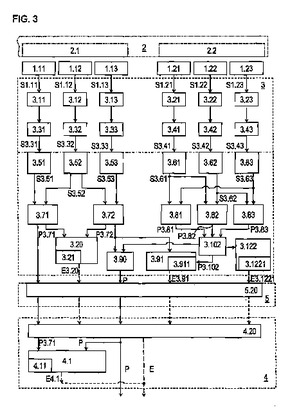 (もっと読む)
(もっと読む)
VR型レゾルバ
【課題】比較的簡素な巻線構造で検出信号に含まれる高調波成分を低減するのに好適なVR型レゾルバを提供する。
【解決手段】極片歯11及び歯21は、これらの歯幅W1と歯幅W2とを同じ幅(W1=W2)に構成する。更に、極片歯11は、その歯幅W1と歯間距離L1とを、W1:L1=1:2となる幅及び長さに構成し、その深さH1を、歯幅W1と深さH1とが、W1:H1=1:2となる深さに構成する。一方、歯21は、その歯幅W2と歯間距離L2とを、W2:H2=1:2となる幅及び長さに構成し、その深さH2を、歯幅W1と深さH2とが、W1:H2=1:2となる深さに構成する。そして、極片歯11の先端部における円周方向の両端部に大きさR1のR(丸み)を設け、歯21の先端部における円周方向の両端部に大きさR2のRを設ける。
(もっと読む)
回転センサ
【課題】ホルダ内で磁気センサ部の位置を固定する点を工夫し、磁気センサ部の位置ずれを防止する回転センサを提供する。
【解決手段】回転体の回転による磁気の変化を検出する磁気センサ部4をホルダ3内に収容し、その磁気センサ部4の端子にケーブル5を接続し、前記回転体の回転を検出する回転センサ1において、ホルダ3内に、ずらして設けられると共に、互いに接続される磁気センサ部4の端子42p,42sとケーブル5の導体13とを備えたものである。
(もっと読む)
可撓性基板を使用する変位感知
【課題】 角度変位を判定するためのセンサを提供する。
【解決手段】
可撓性基板の角度変位が、可撓性基板に関連付けられたミリ波回路の電気的変化に基づいて判定される。この電気的変化は、例えば、位相偏移、振幅偏移、周波数偏移、またはパルス偏移の1つまたは複数に関係することがある。いくつかの実装形態では、可撓性基板は、複数の層に導体を含むことがあり、それにより、可撓性基板の角度変位が、異なる層の導体間の相対変位を引き起こし、それによりミリ波回路の電気的変化を誘発する。
(もっと読む)
第1の事象と第2の事象との間の時間差を求める方法
【課題】2つの事象間の時間差の測定を高い時間分解能で測定し、時間測定に起因する電磁障害を低減する。
【解決手段】位置測定装置の測定信号評価ユニット(3)を用いて第1の事象(A)と第2の事象(B)との間の時間差(T)を求める方法であって、単一または複数の周期信号(x1(t),x2(t))から位置値が求められ、第1の事象(A)の発生時に第1の位置値(φA)が測定信号評価ユニット(3)により求められ、第1の事象(B)の発生時に第2の位置値(φB)が測定信号評価ユニット(3)により求められ、第1および第2の位置値(φA,φB)により時間差(T)が求められる。
(もっと読む)
位置センサ
検出素子と、検出素子から電磁場が放射されるように検出素子に結合された発振器(30)とを含む、物体の位置を測定するための位置センサ(10’)および方法。信号を提供するように構成された出力素子の出力が、発振器(30)の電気特性の変化に依存して変動する。検出素子に対する物体位置の変化が、発振器(30)の電気特性を変化させる。検出素子は、所定の物体位置で信号を乱すように構成された少なくとも1つの不連続点を含む。あるいは、検出素子の近くで温度の変化に対して信号を補正するように構成された温度補償機構がある。  (もっと読む)
(もっと読む)
位置検出装置及び直線駆動装置
【課題】 位置の検出精度が高い位置検出装置及び直線駆動装置を提供する。
【解決手段】
多磁極列を有する固定子と、前記固定子の多磁極列面に対して平行移動すると共に前記固定子からの磁束の向きを検知するセンサデバイスとを備える位置検出装置であって、前記センサデバイスは、複数のスピンバルブ型巨大磁気抵抗効果素子(固定層と自由層を有し、固定層磁化方向が固定されており、自由層磁化方向が磁場の向きに応じて回転する磁気抵抗素子)で構成された感磁面を有し、磁束を前記感磁面と交差させて、前記感磁面内で直交する磁束密度成分同士の振幅の大きさが等しくなるように、前記固定子に対して前記センサデバイスが設けられている。
(もっと読む)
多回転型アブソリュートエンコーダ
【課題】アクチュエータが一方向に回転し続けた場合においても、多回転値カウンタがオーバーフローせずに出力軸の1回転内の回転角度位置を特定できる多回転型アブソリュートエンコーダを提案すること。
【解決手段】モータと減速機を備えたアクチュエータに取り付けた多回転型アブソリュートエンコーダ10は、モータ2の回転軸3の予め設定した原点からの回転数を表す多回転値をカウントする多回転値カウンタ16と、減速機4の減速比Rを記憶する記憶部20と、記憶部20に記憶保持された減速比Rに基づき、多回転値カウンタ16のカウント値の範囲を零回転から(R−1)回転までに設定し、カウント値が(R−1)の状態から回転軸3が正方向に1回転するとカウント値を零にリセットし、カウント値が零の状態から回転軸3が逆方向に1回転するとカウント値を(R−1)にセットするカウンタ制御部19とを有している。
(もっと読む)
回転センサ付軸受
【課題】センサアレイ及び入出力線を付けた回路基板を樹脂環の封止凹部に挿入するのと同時に入出力線を取り出すことを可能とし、かつセンサアレイを封止凹部で高精度に位置決めしながら、しかも封止凹部をコンパクト化する。
【解決手段】樹脂環31に、センサアレイ41、入出力線43の付いた回路基板42を一側面から固定基準面35a上に挿入する封止凹部35を形成し、回路基板42の一端から離してセンサアレイ41を実装し、回路基板42の他端とセンサアレイ41との間に入出力線43を接続し、封止凹部35に回路基板42の一端部が挿入される間隙を固定基準面35aとの間に形成する突出部35bを形成し、封止凹部35の固定基準面35a及び内壁他側端面35cと回路基板42との接触、かつ突出部35bとセンサアレイ41のパッケージの一端との接触により、磁気センサ41a、41bの感磁面がトラック22とラジアル方向に対向させられる封止位置に決まるようにした。
(もっと読む)
センサヘッド、及び誘導型変位検出装置
【課題】受信巻線、及び対応する磁束結合巻線間のアライメント許容値を緩和するセンサヘッド、及び誘導型変位検出装置を提供する。
【解決手段】第1送信巻線13Aの直交方向Yの中心を示す中心線CL4は、第1受信巻線15Aの直交方向Yの中心を示す中心線CL7から直交方向Yに第2受信巻線13Bから離れるように移動距離δをもって位置する。第2送信巻線13Bの直交方向Yの中心を示す中心線CL5は、第2受信巻線15Bの直交方向Yの中心を示す中心線CL8から直交方向Yに第1受信巻線13Aから離れるように移動距離δをもって位置する。移動距離δは、150μmである。
(もっと読む)
回転体の位相・速度検出装置
【課題】広い速度範囲で位相・速度検出の精度を高め、しかも検出回路の信号処理で発生する位相ずれを補償した位相・速度検出ができる。
【解決手段】正弦波エンコーダ1は回転体に結合されて位相差π/2のA,B相の正弦波信号を得る。位相・速度検出回路(5A,5B,6〜8)は、A,B相の正弦波信号からノイズ成分を除去し、A/D変換データに変換し、位相を求めて回転体の位相・速度を求める。位相・速度検出回路(2A,2B,3,4)は、正弦波信号を方形波パルスに変換し、これら方形波パルスの数とパルス位相から回転体の位相・速度を検出し、この方形波パルスの数により位相・速度検出回路8の上位桁を設定する。切替スイッチ9は回転体の高速度領域と低速度領域で位相・速度検出値を切り替える。方形波パルスによるパルス位相と、正弦波信号によるアナログ位相との間の位相ずれを補完する。
(もっと読む)
誘導型変位検出装置
【課題】直交方向の占有面積の増大を抑制した誘導型変位検出装置を提供する。
【解決手段】受信巻線15は、測定軸Xと直交する直交方向Yに開口部151cをもつ囲繞形状を有し、且つ所定の間隔を設けて測定軸X方向に配列された2n個の第1配線部151と、i番目(iは1以上の整数)の第1配線部151(i)の一端から、i+2番目(aは0以上の整数)の第1配線部151(i+2)の他端を結び、且つその中心位置を頂点として第1配線部151の配列側の逆側に折れ曲がった、くの字状の第2配線部152と、2n番目の第1配線部151(2n)の一端と2n−1番目の第1配線部151(2n−1)の一端とを結ぶ第3配線部153とを備える。
(もっと読む)
101 - 120 / 205
[ Back to top ]