
Fターム[2F129AA14]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 水上/水中航行体 (265) | 船舶 (237)
Fターム[2F129AA14]に分類される特許
61 - 80 / 237
情報通信システム、乗物装置、端末装置、情報処理方法、及びプログラム
【課題】端末装置が、乗物に関する情報である乗物情報を無線通信で受信することができる情報通信システムを提供する。
【解決手段】乗物装置10は、乗物1の移動中に変化する情報である乗物情報を取得して、端末装置20に対して無線通信で送信する。端末装置20は、乗物装置10から無線通信で送信されてきた乗物情報を受信し、その乗物情報を出力する。その結果、端末装置20のユーザは、例えば、乗物1に関する情報を端末装置20によって知ることができるようになる。
(もっと読む)
位置情報収集システム

【課題】セーリング競技において、携帯電話網が届きにくい場所にある船舶などの位置情報をリアルタイムに追跡する。
【解決手段】位置情報が捕捉されるべき、トラッキング用端末100a〜100dは、定期的にGPS機能で自端末の経度緯度情報を取得しブロードキャストする。またトラッキング用端末は、自端末で保持している他のトラッキング用端末の位置情報についての端末IDと時刻情報とをブロードキャストし、当該ブロードキャストに応じて他のトラッキング用端末又は中継用端末120a〜120cから送信されてきた位置情報を要求する信号を受けて要求された位置情報を送信する。トラッキング用端末は、短距離無線により送受信を行う。中継用端末は受信したトラッキング用端末を遠距離無線でトラッキング用管理サーバ140に送信し、送信した情報はビューア端末160で表示される。
(もっと読む)
航行情報表示装置
【課題】目標地点への到達が容易な航行情報表示装置を提供する。
【解決手段】表示画面10を備えた画像表示器と、自船の位置を検出し、自船位置情報として出力する自船位置検出装置と、自船の船首方向の方位を検出し、方位情報として出力する方位検出装置と、目標地点Tの位置情報を記憶する位置情報記憶手段と、自船位置情報と方位情報と目標地点Tの位置情報とに基づいて、現在の船首方向を上向きとし、かつ現在の自船位置を固定表示してなる仮想水面42上に、前記目標地点Tを示す目標マーク41と、該目標地点Tを基準とする複数の等距離線39とを変動表示してなる目標到達支援画像31を前記表示画面10に表示する表示制御手段とを具備するようにした。
(もっと読む)
交通機関の経路探索システム、方法、コンピュータプログラム
【課題】特定交通手段を利用することを前提とする経路探索を可能にする。
【解決手段】交通機関の経路探索要求がPC70や携帯端末50からあると設定画面30をPC70や携帯端末50に表示させる。特定交通手段の識別名称の入力、出発地及び目的地の入力を契機に運行情報DB120及び仮想ノードDB130などから経路探索に必要なノードを読み出す。経路探索ツール110が出発地から目的地に向かう方向に存在するノードを順次たどることで経路探索を実行する。経路探索に際して複数のノードを辿る際に、それ以前までに要した運行コストが所定の閾値を越えていると判別した経路についてはその後の探索を終了する。そして、所定の閾値を越えていないと判別した経路の中から、特定交通手段が存在する経路を最適経路候補として特定する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】経路案内情報や地図情報の取得処理の妨害や、通信量の増大を招くことなく、リアルタイムに変化する測位誤差パラメータを適用した経路案内を行うことができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、案内経路を探索して案内経路データを生成し、時間の経過により変化する環境情報に基づいて案内経路データの所定領域毎に現在位置情報の測位誤差範囲を示す測位誤差パラメータを設定し、測位誤差パラメータに従って、現在位置情報に基づく利用者の現在位置を中心とした測位誤差範囲内に、案内経路の少なくとも一部があるか否かを判定し、測位誤差範囲内に案内経路の少なくとも一部があると判定された場合、経路案内情報を出力部を介して出力して経路案内を実行する。
(もっと読む)
海上における船舶の追跡システム
システム1は、所定の数の収集船舶に設けられた端末(2)と、周りの船舶が発する識別信号を検知する手段(6、7)と、さらに検知される識別信号および収集船舶の現在位置からなる識別情報を記録する手段(10、13)とを含んでいる。該システムは、また、衛星(4)を経由してデータを送信するシステム(3)を含み、前記データ送信システムは、端末(2)と監視センター(5)との間のデータ送信を可能にし、前記監視センター(5)は、端末(2)に対して記録された識別情報を提供するよう要請するための、端末への要請発信手段(21)を含んでいる。前記監視センターは、また、受け取った識別情報を分析する手段(23)を含んでいる。 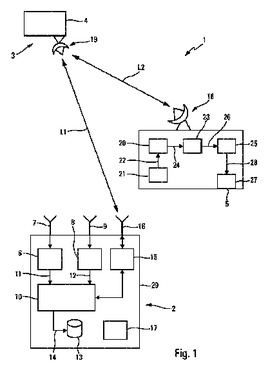 (もっと読む)
(もっと読む)
GNSS受信装置、及び方法
【課題】マルチパスの影響を受けているかどうかの判定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号を受信するGNSS受信装置は、測位信号に対する逆相関コードを生成し、該逆相関コードと受信信号との間で相関処理を行う複数の相関器と、当該GNSS受信装置の移動速度に基づいて、複数の相関器における相関処理時間を制御する制御部と、複数の相関器により得られる相関特性に基づいて、GNSS衛星からの測位信号がマルチパスの影響を受けているかどうかを判定する判定部とを有する。複数の相関器は、位相差の異なる逆相関コードを生成する。
(もっと読む)
船舶の着岸支援装置
【課題】船舶の着岸が不慣れな者でも、理想の着岸軌跡に沿って着岸できるように指示を行う船舶の着岸支援装置を提供する。
【解決手段】特定の港へ入港する船舶のための着岸支援装置であって、
該港への入港時から該着岸目標位置までの軌跡を記録する記録装置を設け、該軌跡に沿うように操船者に操船指示を行う。前記軌跡から、任意の範囲を定めたアプローチ範囲を定め、船舶が該アプローチ範囲から外れている場合は操船者に最終アプローチ開始地点へ移動するよう指示を行う。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】ユーザに経路案内する際、駅等の施設内の移動手段の情報を併せて提供することで、車椅子やベビーカー等を利用するユーザや重い荷物を所持するユーザには、施設内のバリアフリー化された移動しやすい移動手段を把握させることで、ストレスの少ない移動を可能とさせ、また、ウォーキング等を嗜好する健康志向のユーザには、施設内の階段等の移動手段を把握させることができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、経路探索条件を満たす出発地から目的地までの案内経路データを生成し、案内経路中に施設が含まれる場合、当該施設の移動手段データを抽出し、案内経路データと移動手段データとを少なくとも含む経路案内情報に基づく表示画面を表示部に表示させる。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
公共交通機関トリップ計画のためのトランジットルート決定システム
公共トランジット旅行計画システム及び方法は、ジャーニーのための最適公共トランジットルートを決定するために、クエリ時間に先立って、トランジット情報の広範な前処理を用いる。クエリ時間では、トランジット情報が既にシステムにより処理されているので、クエリを遂行するためには非常に少しの計算しか要さない。システムは、公共トランジットジャーニーに関するクエリに応じた、公共トランジット指示をユーザに供給する。 (もっと読む)
カメラ姿勢決定方法、及び実環境物体認識方法
【解決手段】実環境視像における仮想情報の表示方法であって、サーバ(2)のデータベース(3)において、地理的グローバル座標系(200)に関連したグローバルポジション及び方位を有する少なくとも1つの仮想オブジェクトを、前記仮想オブジェクトの前記グローバルポジション及び方位について与えられる決定を容認する第1ポーズデータ(PW10)と共に提供する工程と、モバイル機器(30)を用いて、少なくとも1つの実環境(40)の画像(50)を撮影し、前記画像が撮影された前記地理的グローバル座標系に関連したどの位置であり、どの方位であるかとの決定を容認する第2ポーズデータ(PW50)を提供する工程と、前記モバイル機器のディスプレイ(31)に前記画像(50)を表示する工程と、前記サーバ(2)のデータベース(3)内の仮想オブジェクト(10)にアクセスし、前記第1及び第2ポーズデータ(PW10,PW50)に基づいて、前記ディスプレイに示された前記画像(50)に前記仮想オブジェクト(10)を位置付ける工程と、前記仮想オブジェクト(10)を操作する、若しくは前記ディスプレイに表示された前記画像(50)内の対応する位置に位置付けることにより、別の仮想オブジェクト(11)を追加する工程と、前記画像(50)における位置付けに一致する修正第1ポーズデータ(PW10)と共に操作された前記仮想オブジェクト(10)、若しくは前記サーバ(2)のデータベース(3)内の前記画像(50)の位置付けに一致する第3ポーズデータと共に更なる仮想オブジェクト(11)を提供する工程と、を具備し、前記修正第1ポーズデータ及び前記第3ポーズデータが、前記操作された仮想オブジェクト若しくは前記更なる仮想オブジェクトの前記グローバルポジション及び方位について与えられる決定をそれぞれ容認している。 (もっと読む)
ノンフォトリアリスティック(NPR)3Dマップを用いる3Dナビゲーション方法
ナビゲーションマップを表示する方法は、車両の位置を自動的に測定する工程を含む。車両を囲む建物に関連する三次元または二次元のデータが特定される。車両の周囲の三次元物体のノンフォトリアリスティック画像は、データに基づいてレンダリングされる。ノンフォトリアリスティック画像はユーザーに電子的に表示される。 (もっと読む)
移動体表示装置
【課題】移動体の特定の挙動を検出することで、その挙動を示した位置を自動的に記憶することができる移動体表示装置を提供する。
【解決手段】移動体表示装置としてのプロッタ装置は、GPS受信機と、メモリと、CPUと、を備える。GPS受信機は、測位信号を取得して、当該自船の位置を算出する。また、GPS受信機は、測位信号に基づいて、自船の速度又は向きを算出する。メモリは、GPS受信機で算出した前記速度が所定時間内に所定の変化量以上変化したこと、又は、GPS受信機で算出した向きが所定時間内に所定角度以上変化したことを検出した場合に、前記変化が生じた位置を記憶する。CPUは、前記変化が生じた位置に対応するマークをディスプレイに表示するための処理を行う。
(もっと読む)
表示装置
【課題】共通の表示画面上で異なる方向からそれぞれ異なる画像を視認できる表示装置であって、使用状況に合致した表示手段12の画素配置及びシャッター手段15の制御を実現すると共に光量を制御して省電力化を実現する。
【解決手段】一方から見るための一方用画素と、他方から見るための他方用画素を有する表示手段12と、一方用画素が透明部分を介して一方から視認され他方用画素が透明部分を介して他方から視認されるシャッター手段15と、光量を制御するバックライト18とを備える。2方向から同じ画面を見るシングルモードと、異なる画面を見るデュアルモードとを選択する。光量を減らすエコシングルモードと、光量をエコシングルモードよりは高める通常シングルモードとに切替え、また光量を減らすエコデュアルモードと、光量をエコデュアルモードよりは高める通常デュアルモードとに切替える。
(もっと読む)
地図表示システム、端末装置及び地図表示方法
【課題】 いかなる縮尺の地図が表示されていても1回のスクロール操作によってユーザが所望する最適なスクロール量を提供するとともに、複数の表示画面を表示させた場合でも、ユーザが所望する地図情報を見易い態様で表示する。
【解決手段】 端末装置20は、表示画面に地図画像を含む各種画像を表示する表示手段204と、前記地図画像と、前記地図画像よりも広域な範囲を含んだ位置情報の相対的特性を用いた図形画像と、前記図形画像上の前記地図画像に対応する表示範囲を表す枠画像と、を各々異なるレイヤーとして管理し、表示手段204に重ねて表示させる表示制御手段205と、表示手段204に表示する画像に対する操作入力を受け付ける操作入力手段206と、を備え、操作入力手段206による前記図形画像と前記枠画像との相対位置を移動させるスクロール操作に伴い前記地図画像をスクロールさせる。
(もっと読む)
電子機器、判断方法およびプログラム
【課題】より正確に現在位置が屋内あるいは屋外であることを判断できる電子機器、判断方法およびプログラムを提供する。
【解決手段】周囲の温度を検出する温度検出部4と、日時または時刻を計時または取得する時計機能部2と、周囲の照度を検出する照度検出部3と、照度と温度のうちの少なくとも1つと、日時または時刻と、屋内かまたは屋外かを判断する判断基準とを関連付けたデータベースを有する記憶部6と、温度検出部4、時刻取得部2および照度検出部3から温度、時刻、照度を得て、データベースとを照合して屋内であるか屋外であるかを判断する制御部5と、を有している。
(もっと読む)
船舶の自動操舵装置および自動操舵プログラム
【課題】操船者が容易に船舶の航路を設定することができ、かつ、船舶が設定航路上を航行するよう確実に制御できる船舶の自動操舵装置および自動操舵プログラムを提供する。
【解決手段】操船者が自動操舵装置の表示部により、自動操舵に切り替えると、その時点における船舶の船首方位α1および船舶の位置β1を自動操舵装置の制御部が取込み、設定航路δおよび設定方位γを算出するS1,S2。以後は、各時点における船舶の船首方位α2と船舶の位置β2を随時取込みS3,S7、設定航路δと設定方位γとの方位偏差ε3を計算しS10、これに基づき舵を制御するための命令舵角ωを算出するS11。
(もっと読む)
自動操舵システム及び自動操舵装置
【課題】海の状況に素早く対応して船舶を適切な制御感度で制御する自動操舵システムを提供する。
【解決手段】自動操舵システム10は、GPSコンパス11と、GPSプロッタ12と、風向風速計13と、レーダ装置14と、舵角制御バルブ15と、自動操舵制御装置17と、を備える。自動操舵制御装置17は、GPSコンパス11が検出した船首方位と、GPSプロッタに入力された目的地の方位と、がなす角度を示す偏角を求める。そして自動操舵制御装置17は、この偏角に適用する補正係数を、風向風速計13が検出した現在地の風向及び風速と、レーダ装置14が取得した波の高さ及び波の向きであってGPSプロッタ12が設定した進行予定ルート上の波の高さ及び波の向きと、に基づいて求める。その後、自動操舵制御装置17は、この補正係数を偏角に適用して得られた指示舵角を用いて舵角制御バルブ15を制御することで船舶の進行方向を変化させる。
(もっと読む)
航法装置
【課題】自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで記憶を行い、所定値に満たないときは所定の距離間隔ごとに取り込んで記憶を行う取込記憶手段とを具備している。
(もっと読む)
61 - 80 / 237
[ Back to top ]