
Fターム[2F129AA14]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 水上/水中航行体 (265) | 船舶 (237)
Fターム[2F129AA14]に分類される特許
161 - 180 / 237
ルート提示装置、ルート提示方法、およびコンピュータプログラム
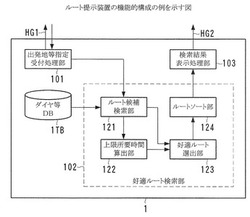
【課題】移動時間が短いこと以外の快適性を有するルートをユーザに提示する。
【解決手段】ルート提示装置1に、出発地から目的地までのルートを複数検索するルート候補検索部121と、ルート候補検索部121によって検索された複数のルートの中から、1つの乗物に乗っている時間が最長であるものを選出する好適ルート選出部123と、好適ルート選出部123によって選出されたルートをディスプレイに表示させる検索結果表示処理部103と、を設ける。
(もっと読む)
交通手段の交通セーフティを改善するための方法および装置

【課題】航空および船舶航行において道路交通において交通セーフティを改善するための方法および装置を提供すること。
【解決手段】特定の間隔で実際の位置および実際の方向を検出し、少なくとも立入制限領域または危険領域の地理的な記述データを管制局から呼び出し、このデータから警告条件によって、該警告条件が満たされた場合には少なくとも1つの警告指示を生成し、該警告条件は、該少なくとも1つの立入制限領域または危険領域への侵入が適切な対抗措置操縦によって確実に回避できるように選択される方法および装置。
(もっと読む)
ナビゲーション装置
【目的】 実用効果と安全性を改善するナビゲーション装置を提供する。
【構成】 入力部、中央処理部、出力部、ロケータ、処理手段、演算検索手段、記憶部によって構成され、目的、技能、移動体の種別、旅行域のデータなどから旅行に適合しない単位帯域であるセルを演算検索し出力表示する。
【効果】 多種多様な旅行要素から現実的で有用な基本情報としてセルを提示しセルを回避して目標に到達することを支援する。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 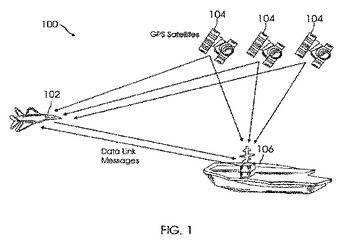 (もっと読む)
(もっと読む)
移動体シミュレーション装置およびその方法
【課題】実行性能を向上させた動的タイムステップ制御方式を適用した移動体シミュレーションを提供する。
【解決手段】論理時刻刻み幅Δtを設定してシミュレーション時刻を進めるタイムステップ法による移動体シミュレーションを行い、経路網がノードとリンクで現された経路網情報、各移動体毎の前記経路網上の移動ルートがノードとリンクで現された計画路データを含む移動体情報を入力し、前記経路網上の移動体の前記計画路データに従い、ノード又はリンクが一致する位置に従って、現模擬位置から他の移動体を認知する可能性のある位置に相当する他の移動体との会合可能性区間までの移動時間に基づく論理時刻刻み幅Δtを決定するΔt決定手段と、決定された論理時刻刻み幅Δtに基づいて模擬時刻を進める動的タイムステップ制御により移動体の模擬を行う行動模擬手段とを含む。
(もっと読む)
最適航路探索方法
【課題】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データに基づき、ある海域の出発点から到着点までについて最適航路を演算する際、演算上の船舶の航行に合わせて変化する海気象データを用いる最適航路探索方法を提供することを目的とする。
【解決手段】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいてある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
(もっと読む)
経路表示装置及び経路表示方法等
【課題】ユーザに面倒な操作をさせることなく、ユーザが所望の地点までの経路をより効率良く把握することが可能な経路表示装置及び経路表示方法等を提供する。
【解決手段】本発明は、移動体の状態に関する状態情報を取得し、当該取得した状態情報に基づいて、前記移動体が停止状態又は徐行状態にあるか否かを判別し、前記移動体が停止状態又は徐行状態にあると判別した場合には、ユーザにより指定された地点までの経路を示す地図をスクロール表示させる。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
経路画像検索装置、経路画像検索方法及び経路画像検索プログラム
【課題】所望の地点の状況を表示画面上で複数の方向から観察することができる経路画像検索装置、経路画像検索方法及び経路画像検索プログラムを提供する。
【解決手段】利用者が入力操作部18から入力した所望地点の座標情報を地点指定部100が取得するとともに、当該地点を経路画像の検索位置として指定すると、位置検索部102は、上記指定地点から撮影位置が所定距離以内である経路画像を経路画像データベース16から検索して取得する。角度検索部104は、位置検索部102が検索した経路画像について、経路画像の撮影方向が、上記指定された地点と撮影位置とを結ぶ線から所定角度以内にある経路画像を検索する。以上により検索された経路画像は、表示制御部106が表示部20に表示する。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
測位装置、携帯型電子機器及びプログラム
【課題】測位精度の向上を実現すること。
【解決手段】携帯型電話機1の近距離無線通信部50が、移動体である自動車2の近距離
無線通信部250との間で通信可能な状態にあることが検出されなかった場合は、携帯型
電話機1自身の移動状況の情報である端末移動状況情報及び複数のGPS信号に基づいて
現在位置の測位が行われる。一方、近距離無線通信部250との間で通信可能な状態にあ
ることが検出された場合は、自動車2の移動状況の情報である移動体移動状況情報が取得
され、移動体移動状況情報及び複数のGPS信号に基づいて現在位置の測位が行われる。
(もっと読む)
方位判別装置、方位判別方法及び方位判別プログラム
【課題】本発明は、簡易な構成で移動体の方位や位置を正確に求め得るようにする。
【解決手段】本発明は、車両に設置された二軸加速度センサ3により、当該車両が旋回したときの遠心力によって発生する移動体の進行方向と直交した横G値を検出し、横G値と所定の閾値TH1、TH2とに基づいて車両が右旋回したか左旋回したかを判別することにより、角速度センサを用いることなく単一の二軸加速度センサ3だけの簡易な構成で車両の旋回方向を正確に判別することができる。
(もっと読む)
経路探索システム
【課題】
インターネットなどにおける経路探索システムにおいて、ユーザの経路に対する不安を解消すると共に、その探索した経路よりも良い経路を探索できるように、品質改善の支援を可能とする、経路探索システムを提供することを目的とする。
【解決手段】
少なくとも出発地と目的地を条件としてユーザ端末から入力を受け付ける条件入力受付部と、受け付けた出発地と目的地の情報に基づいて経路探索を行う経路探索部と、経路探索の探索結果であるシステム経路をユーザ端末に送る経路探索結果処理部と、ユーザ想定経路の入力をユーザ端末から受け付けるユーザ想定経路入力受付部と、受け付けたユーザ想定経路とシステム経路とを比較し、その結果をユーザ端末に送る比較部と、ユーザ想定経路がシステム経路よりも優れている場合に、その旨を所定の担当者に通知する改善処理部と、を有する経路探索システム。
(もっと読む)
ナビゲーション装置及びコンピュータプログラム
【課題】目的地点の名称の読みが不明な場合でも、漢字による目的地点の設定及び検索することが可能なナビゲーション装置及びコンピュータプログラムに関する。
【解決手段】ナビゲーション装置の処理部11は、記憶部15が記憶する地点データベース151から目的地点の名称の漢字表記の先頭文字を抽出して抽出した先頭文字の一覧からなる選択画面を表示部14に表示する。処理部11は、受付部16が先頭文字一覧の中の1つの先頭文字を選択する操作を受付けることにより先頭文字を選択する。処理部11は、選択した先頭文字を有する名称を記憶部15に記憶された地点データベース151から検索して検索結果一覧からなる選択画面を表示部14に表示する。処理部11は、検索結果一覧の中の目的地点の名称を選択する操作を受付部16が受付けることにより名称を選択して設定する。
(もっと読む)
移動体姿勢計測装置
【課題】従来に比べて移動体の姿勢の計算が簡易なものとし、また、移動体の姿勢の算出値の精度を向上させる。
【解決手段】移動体に設けられて衛星の信号を受信する基準アンテナ11及びn個(1,2,3,…)のユーザアンテナ12で受信した衛星の信号から前動体と前記衛星との位置関係を算出する。また、各アンテナで受信した衛星信号の搬送波位相を測定する。そして、この搬送波位相から一重位相差又は二重位相差を計算する。基準アンテナとユーザアンテナとの位置関係、移動体と衛星との位置関係、及び一重位相差又は二重位相差の関係に基づいて、一重位相差又は二重位相差に対する未知の整数値アンビギュイティ、移動体の未知の姿勢成分、及び一重位相差又は二重位相差についての初期値を算出する。非線形推定法を利用して初期値を収束させることにより、未知の整数値アンビギュイティ及び移動体の未知の姿勢成分を算出する。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 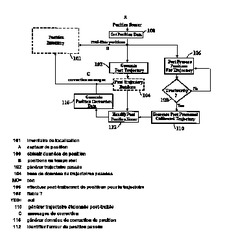 (もっと読む)
(もっと読む)
ナビゲーション装置、停止検出方法及び停止検出プログラム
【課題】本発明は、車両100が停止しているときに、車両100が停止していることを確実に検出することができる。
【解決手段】本発明は、GPS信号に基づく位置信号PSからGPS速度を算出し、当該GPS速度から車両100が停止していると認識した際に、車両100に作用する加速度を表す横方向加速度信号SBを検出すると共に、当該横方向加速度信号SBの分散値を車両100の振動を表す横方向加速度分散値DPとして算出し、この横方向加速度分散値DPの平均値を第1の閾値である停止判定閾値SDとして設定することにより、当該横方向加速度分散値DPに基づいて停止判定閾値SDを設定するようにする。
(もっと読む)
情報提供装置、情報提供方法、情報提供プログラム、および記録媒体
【課題】操作者が必要とする情報を安全かつ簡単に提供すること。
【解決手段】移動体が移動を開始した場合には、第1の取得部101および第2の取得部102によってそれぞれ該当する画像情報を取得し、取得された画像情報および地図情報を用いて、当該地図情報の中から移動体の周囲の画像情報に対して同一性を有する地図情報を抽出部106によって抽出し、抽出された地図情報の中から移動体の周囲の画像情報における操作者の視点の位置に一致する対象物を選択部107によって選択する。そして、選択された対象物に関する情報を出力部108によって出力する。
(もっと読む)
3次元マップマッチング処理装置、3次元マップマッチング処理方法、3次元マップマッチング処理プログラム、ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車
【課題】3次元座標データを用いて移動体の現在位置をマップマッチングするときに誤差の発生を抑制できるようにすることを課題とする。
【解決手段】ロケーションコンピュータ21では、現在位置および進行情報の情報に基づいて2次元マップマッチングが実行されて2次元位置情報が算出される。その2次元位置情報と3次元座標DB22に記憶される3次元座標データとに基づいてZ座標位置が算出される。さらに、移動体の移動上、Z座標位置に基づいてZ軸方向の勾配差が検出され、その勾配差に基づいて移動距離が補正されて3次元位置情報が算出される。画像処理装置27では、3次元位置情報に基づいて経路上の案内画像が生成される。その案内画像には自動車の傾斜補正が加味されて、カメラ7で撮影された実際の風景画像が重畳される。その結果はディスプレイ5に表示出力される。
(もっと読む)
161 - 180 / 237
[ Back to top ]