
Fターム[2F129AA14]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 水上/水中航行体 (265) | 船舶 (237)
Fターム[2F129AA14]に分類される特許
221 - 237 / 237
交通情報処理データベース、交通情報処理装置、そのシステム、その方法、そのプログラム、そのプログラムを記録した記録媒体、および、案内誘導装置
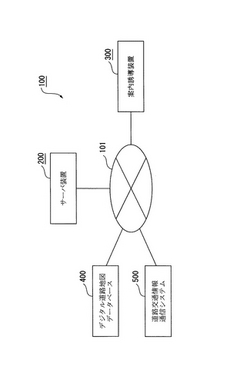
【課題】 簡単な構成で交通情報の利用が容易な案内誘導システムを提供する。
【解決手段】 ナビ地図データを利用して車両の走行を案内誘導する案内誘導装置300の端末記憶手段に、基準地図データのノードに対応するVICS(登録商標)データのノードIDと、同一地点となるナビ地図データのノードIDとを関連付けた交通情報処理データを複数記憶するテーブル構造の交通情報処理データベースを、サーバ装置200から取得して構築する。VICSデータを案内誘導装置300が受信すると、処理手段により交通情報処理データに基づきVICSデータにナビ地図データのノードIDを紐付けする。簡単なテーブル構造で自動的にVICSデータをナビ地図データに対応して利用できる。
(もっと読む)
移動通信端末機を用いた地図データ提供方法およびシステム
本発明は、移動通信端末機を用いた地図データ提供方法およびシステムに関し、より詳しくは、移動通信端末機にフルマップのサブセットで構成される地図データを提供する地図データ提供方法およびシステムに関する。本発明による地図データ提供方法は、所定の地図データ提供サーバから所定の経路と関連したシンプルマップデータを受信する段階と、GPS受信機を用いて前記移動通信端末機の現在位置の入力を受ける段階と、前記現在位置を前記シンプルマップデータにマッチングして前記移動通信端末機の表示手段に表示する段階とを含み、前記シンプルマップデータは、道路中で前記経路に対応する第1道路と関連した第1道路データ、および前記第1道路上のノードと前記第1道路上に位置していない他のノードを連結する第2道路と関連した第2道路データを含む地図データであり、前記ノードは、道路上の交差点または道路上の袋小路地点であることを特徴とする。本発明によると、移動通信端末機に所定の経路と関連した道路データおよび地点情報データのみ含む地図データであるシンプルマップデータを送信することによって、移動通信端末機に送信されるデータ量を減少させることができる地図データ提供方法およびシステムが提供される。従って、ユーザが前記地図データを要請して受信するまでの時間も短縮される。 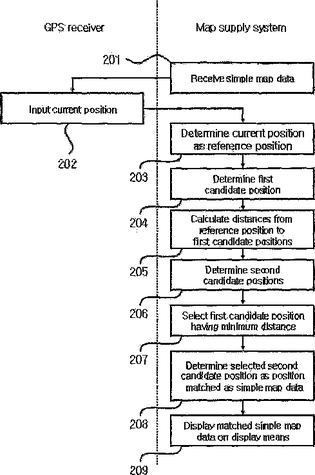 (もっと読む)
(もっと読む)
船舶用自動航法援助システム

【課題】潮流の有無に関わらず、船舶を予定航路に沿って正確に航行させることを可能とする船舶用自動航法援助システムを提供する。
【解決手段】命令半径演算部16は、予定航路データ記憶部12より入力された予定航路データと、GPS航法装置14より取得した対地速度・方位情報と、ジャイロ装置20より取得した対水方位及び船速測定器22より取得した対水速度(対水速度・方位情報)とから潮流速度・方位情報を算出し、オートパイロット装置18は、命令半径演算部16より入力された前記潮流速度・方位情報と、取得した前記対水速度・方位情報とに基づいて舵角量を算出し、算出した前記舵角量を舵器24に出力する。これにより、舵器24は、入力された前記舵角量に基づいて船舶を所定方位に旋回させ、この結果、該船舶を予定航路に沿って正確に航行させることができる。
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
位置測定システム
【課題】 切り立った山に囲まれたダムのような人工衛星からの電波が直接受信できない領域を移動体が移動する場合も、簡単な構造であるにもかかわらず、GPSを用いて正確に測定することができるようにする。
【解決手段】 移動体20と、そして、GPS機能を備えた飛行体30とを含んで構成されてなるGPSを用いた位置測定システムであって、飛行体30は、移動装置と、移動体との相対位置を計算可能な移動体位置計測装置32−34と、及び、移動体位置計測装置によって計測した位置データを移動体に送信する送信装置36とを有しており、移動体20は、飛行体30から送信される位置データを受信する受信装置と、及び、受信した位置データを保存する記録装置とを有している。
(もっと読む)
座標相互変換モジュール
世界メッシュコードを容易に利用することが可能な座標相互変換モジュールを提供する。求める地点の経度よりゾーン番号(I〜VI)およびブロック内の東西番号を求める(S1)。求める地点の緯度よりブロック番号および南北番号を求める(S2)。東西番号と南北番号とによりユニット番号を求める(S3)。当該地点の経度から求めたユニットの西端経度を引いた差を2160秒で除し(S4)、その数値に10のn乗を乗じ、整数部分をメッシュの東西番号とする(S5)。求めたユニットの北端緯度から当該地点の緯度を引いた差をユニットの間差Aを秒数に換算した数値で除し(S6)、その数値に10のn乗を乗じ、整数部分をメッシュの南北番号とする(S7)。ブロック番号、ユニット番号、東西番号、南北番号の順に並べてNコードとする(S8)。 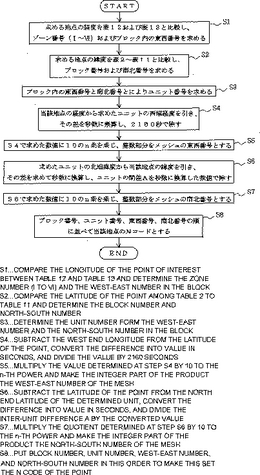 (もっと読む)
(もっと読む)
受信機
【課題】少なくとも自船と対象となる事象との距離を容易に取得して出力することができる簡素な構造の受信機を提供する。
【解決手段】受信機1はナブテックス放送信号を受信するとテキストデータを再生して、緯度経度情報に必ず含まれる特定文字列「数字、N、数字、E」を抽出し、この特定文字列が含まれるセンテンスから緯度経度情報を抽出する。次に、ナブテックス受信機1は、この抽出した緯度経度情報と自船の緯度経度情報とから、抽出した緯度経度情報で表される位置と自船位置との距離を算出するとともに、自船位置に対する方位を算出する。そして、少なくとも算出した距離情報と抽出した緯度経度情報とを外部出力する。
(もっと読む)
車両無線通信システムおよび方法
狭域通信サービスバンド経由で車両無線通信するシステムと方法。ナビゲーション手段を備えた車両と、処理装置と、無線通信リンク経由でメッセージ送信する通信手段とがある。安全通信用制御チャネルと、安全以外通信用サービスチャネルがある。制御チャネルは、安全交換区間を備えた非競合期間と、安全以外サービス区間を備えた競合期間とに再分割される。アクセスポイントは、領域内で通信リンク経由で車両と通信する。方法は、車両が通信域内か判定し、通信域内なら車両がアクセスポイントに登録済か判定し、現在時刻が安全交換区間内か判定し、各登録車両に関し所定時間に安全交換区間中の各登録車両から安全通信送信する。全ての登録車両による安全通信交換が完了済か判定し、完了済なら車両を制御チャネルから退出させ、現在時刻が競合期間内か判定し、現在時刻が競合期間内なら安全以外通信を送信する。 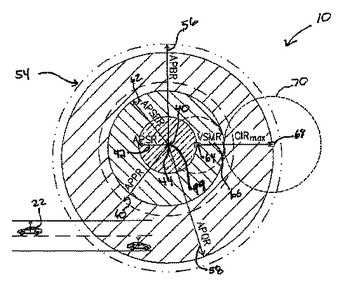 (もっと読む)
(もっと読む)
航行支援方法およびシステム
航行支援システムにおいて、ユーザによって企図された水上旅行に関連する情報がユーザからインターネットを介して受け取られる。システムは水路データを記憶しているデータベースを含む。データベースはユーザからの情報に応答してアクセスされる。少なくとも1つの推奨水上ルートが、ユーザ情報に応答してかつデータベース内の水路データに従って導出され、推奨ルートはコンピュータネットワークを介してユーザに伝達される。ルートの導出は好ましくは、有効に航行可能な区域を通って延びるルート区間だけを包含することからなる。 (もっと読む)
ナビゲーション方法
ここに記載されているのは、少なくとも2つの部分ルートに分けられる全体ルートを計算して、スタート地点から目的地点までナビゲーションする方法である。これらの部分ルートのうち、少なくとも1つの部分ルートは移動式のナビゲーションクライアントにおいてローカルに計算され、また少なくとも1つの別の部分ルートは中央の固定式のルートサーバにおいて計算される。本発明では、結果的に得られる全体ルートに依存して第1の部分ルートの終点および第2と部分ルートのスタート点としての少なくとも1つの引き継ぎ点を求める。  (もっと読む)
(もっと読む)
三次元での高精度のリアルタイムのトラッキング及び位置決定用のシステム及び方法
対象物のGPS座標と、対象物の移動に関連する方向とを生成することにより、対象物をトラッキングする方法とシステムである。GPS座標は緯度と経度と高度とを有し、それらが処理される。GPS座標は、対象物の高度を構造物内での層を特定する識別子に関係付けるように処理され得ることである。対象物を表すアイコンは、三次元モデルの第1の図に正確に配置され得る。対象物の層、対象物の方向、及び/又は対象物のGPS座標を示すために、インジケータがアイコンに関連付けられ得る。対象物のGPS座標は、第2の対象物の位置と比較され、発送の命令を決定してもよい。対象物は、人、車両、船又は飛行機でもよい。 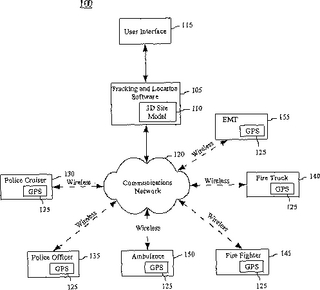 (もっと読む)
(もっと読む)
車両に対してナビゲーション情報を表示する方法及び装置
本発明は実質的に、直観的に容易に理解できるように車両に対するナビゲーション情報を仮想的なパイロット車両に車両周囲の画像を重ねた形で表示し、表示される仮想パイロット車両の表示様式、及び/又は位置、及び/又は向き、及び/又は大きさを、ルートもしくは動作の推奨、及び/又は車両速度、及び/又は推奨ルートの基準点、及び/又は車両の位置と向き、及び/又は車両周囲を検出するカメラの位置と向き、及び/又は運転者の目の位置と視線に依存して決定することから成る。  (もっと読む)
(もっと読む)
情報表示制御装置、ナビゲーション装置、情報表示制御装置の制御方法、情報表示制御装置の制御プログラム、およびコンピュータ読取可能な記録媒体
イメージデータ取得部が、表示装置に表示される地図情報を、地図情報記憶部から読み出しイメージデータに変換してイメージデータ記憶メモリに記憶させ、変更表示制御部が、イメージデータを読み出し、表示装置に縮小または拡大表示させ、確定サイズ情報生成部が、地図情報記憶部から地図情報を読み出し、当該地図情報の縮小または拡大率をユーザ指示における表示倍率に合わせた確定サイズ情報に変換し、確定表示制御部が当該確定サイズ情報を表示装置に表示させることにより、表示装置に表示された情報を、表示精度が良く、視認できる簡単な操作でユーザの好みの表示倍率の情報に変換することができる情報表示制御装置を実現することができる。 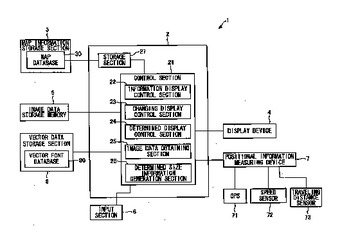 (もっと読む)
(もっと読む)
マップデータ作成装置、それを備えた移動体、並びにマップデータ作成方法
周囲を撮影するカメラと、GPS受信部と、地図情報が記憶された地図情報記憶部と各部の動作を制御する制御部とを備え、この制御部によって、カメラが撮影した画像データを、GPS受信部によって検知した撮影時の位置情報と関連付け、さらに、位置情報に関連付けた画像データを、地図情報に関連付けてマップデータを作成する。これにより、移動中に撮影した周囲の画像と地図情報とを関連付けたマップデータを作成することができる。 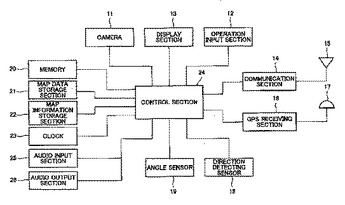 (もっと読む)
(もっと読む)
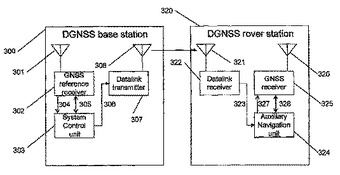
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。  (もっと読む)
(もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 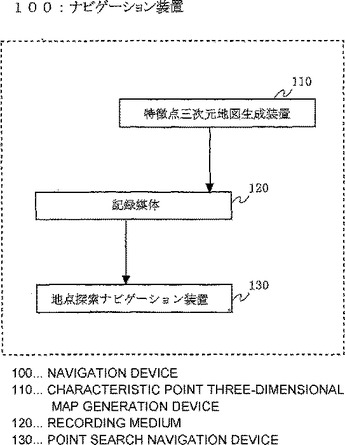 (もっと読む)
(もっと読む)
221 - 237 / 237
[ Back to top ]