
Fターム[2F129BB03]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 人工衛星 (10,969) | GPS (10,839)
Fターム[2F129BB03]に分類される特許
2,061 - 2,080 / 10,839
地図情報提供装置及びプログラム
【課題】端末装置からの要求に応じて該端末装置に地図情報を提供するときに、目的地の指定を受けてから最初に送信する地図情報により該端末装置に表示される地図の範囲を目的地周辺の環境にかかわらず適切に設定する。
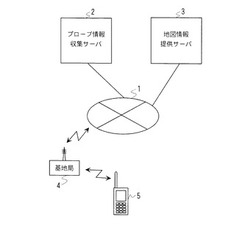
【解決手段】プローブ情報収集サーバ2は、図示されていない多数の携帯端末装置で生成されるプローブ情報(位置情報、時刻情報)を収集し、内部のプローブ情報DBに保存する。地図情報提供サーバ3は、携帯端末装置5から地図情報の提供を要求されたとき、所定の時点に目的地から所定の半径の円内に存在するプローブ情報に基づいて、携帯端末装置5に提供する地図情報の切り出し範囲及び縮尺を設定する。
(もっと読む)
表示位置設定装置

【課題】記憶装置の使用容量を大きくすることなく、インターフェースの環境に応じた構成要素の配置ができる表示位置設定装置を提供する。
【解決手段】まず外部メモリから、インターフェースの環境として使用される言語体系を取得する(S101)。言語体系として例えば、英語や日本語は左から右へと文字を書く言語であるため、この場合であれば(S102:英語)、構成要素の位置情報をそのまま用いて、表示装置の画面に配置する(S104)。一方、言語体系がアラビア語であれば(S102:アラビア語)、右から左へと文字を書く言語であるため、同じ位置情報のX座標を計算し直して(S107)、構成要素の配置が、英語の場合と左右で反対側の位置となるように配置して表示する(S108)。
(もっと読む)
駐車位置案内装置、方法およびプログラム
【課題】車両の走行挙動に対応した走行支援機能を車載端末に実行させる技術の提供。
【解決手段】駐車位置案内装置であって、駐車位置ごとに、当該駐車位置にて車両が非接触式充電を実際に行った際の充電効率を示す充電効率情報を取得する充電効率情報取得手段と、前記充電効率情報に基づいて前記駐車位置を前記充電効率とともに案内する案内手段と、を備える。
(もっと読む)
表示装置、及び、プログラム
【課題】 表示画面上の指位置の変化に応じた表示処理を行うにあたり、ユーザ間の個体差によらず操作性を向上させた表示装置を提供する。
【解決手段】 2つの指位置が取得されると、2つの指位置から操作枠の大きさが設定されて、表示画面に操作枠が表示される。そして、操作枠内で2つの指位置の移動があった場合(S220,S230)、操作枠内における指位置の移動を表示画面全体における指位置の移動として変換し(S240)、表示処理を行う(S250)。操作枠内における指位置の移動を表示画面全体における指位置の移動に変換する場合(S240)、操作枠を基準とした操作枠内における指位置の変化割合を、表示画面全体を基準とした表示画面全体における指位置の変化割合とする。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両の進行方向に対して斜めに取り付けられた距離センサを用いて、車両がコーナー道路を走行している場合であっても、車両が現在走行しているレーンを正しく認識することができる運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置60は、地図情報を格納する地図情報DB62aと、車両の進行方向に対して斜めとなる方向の距離を測定する距離測定部61aと、測定距離に基づいて算定された側方距離を算定する側方距離算定部61bと、側壁が自車の進行方向に対して平行に設けられているものと仮定した場合の仮定側方距離に、側方距離を補正するための補正値を各レーン毎に算定する補正値算定部61cと、各レーン毎の補正値に基づいて、側方距離を仮定側方距離に補正する補正部61dと、仮定側方距離に基づいて車両が走行しているレーンを特定するレーン特定部61eとを備える。
(もっと読む)
気象情報処理機器および気象情報処理システム
【課題】さまざまな環境下において、移動体のユーザの間で気象状況の変化の周知方を図ることができる気象情報処理機器を提供する。
【解決手段】 気象情報処理機器は、車両Qに搭載されるものであって、第1演算処理要素110と第2演算処理要素120とを備える。第1演算処理要素110は、車両Q1が接している気象状況を表わす気象状況変数diを断続的に測定する。そして、当該気象状況変数の今回測定値diが基準値に対して所定値ε以上の乖離度を生じた場合、当該乖離度を表わす気象変化検知情報を生成する。第2演算処理要素120は、他の車両Q2に搭載されている他の気象情報処理機器に対して、当該気象変化検知情報を送信し、当該気象変化検知情報に応じた第1気象情報を出力させる。
(もっと読む)
安全運転支援装置、安全運転支援方法、コンピュータプログラム
【課題】自車両が交差点で対向車線を横切る際に、対向車の進路を精度よく推定し、交差点内での接触可能性の高低を報知し得る安全運転支援装置、安全運転支援方法及びコンピュータプログラムを提供する。
【解決手段】自車両Mが交差点Iで右折する際に、対向車両Oが存在すると、当該対向車両Oが走行する対向車両レーンLのレーン種別に基づく基準評価点、交差点距離Dに基づく交差点距離係数、交差点Iで接続される対向車進入道路R及び交差道路Cに基づく道路優先度係数、交差点Iを基準とした施設Fの位置及び施設ランクに基づく施設係数に基づいて、対向車両Oの進路が推定される。推定された対向車両Oの進路に基づいて、交差点I内で自車両Mと対向車両Oが接触する可能性が評価され、評価結果に応じた案内が行われる。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照用画像データの作成に適した画像処理システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出する特徴点抽出部と、画像特徴点に割り当てられた重み係数に基づいて画像特徴点から撮影画像毎の画像特徴点データを生成する画像特徴点データ生成部と、撮影画像中における画像特徴点データの分布状態に応じて画像特徴点に与えられる重み係数を調整する調整係数を設定する調整係数設定部と、画像特徴点データを画像特徴点データに対応する撮影画像の撮影位置を含む撮影属性情報と関係付けて、風景画像認識のために利用される参照データとしてデータベース化する参照データデータベース化部とを備えた画像処理システム。
(もっと読む)
風景マッチング用参照データ生成システム及び位置測位システム
【課題】多数のプローブカーから収集された撮影画像に基づき、風景画像マッチング用の効果的な参照用画像データを生成する。
【解決手段】推定自車位置を算定する機能を有する複数のプローブカーによって順次取得されたプローブデータから取り出された所定撮影位置領域の撮影画像の撮影位置の精度信頼度を評価して、この精度信頼度を撮影画像に付与し、所定度以上の精度信頼度を有する複数の撮影画像を処理対象撮影画像として選別し、各々の処理対象撮影画像の画像特徴点を抽出し、それらを統計処理して画像特徴点データを生成する。この画像特徴点データにこの画像特徴点データの元になった処理対象撮影画像の撮影位置を関係付けて、風景マッチングに利用される参照データが生成される
(もっと読む)
画像処理システム
【課題】風景画像認識技術に利用される効果的な参照用画像データの作成が重要となるので、そのような効果的な参照用画像データの作成に適した画像処理システム。
【解決手段】車両からの風景を撮影した撮影画像から当該撮影画像中における識別可能な事物を特徴オブジェクトとして認識し、この特徴オブジェクトを規定する1つまたは2つ以上の代表画像特徴点を抽出し、撮像画像内における代表画像特徴点の位置を表す特徴点位置情報と特徴オブジェクトの属性であるオブジェクト属性を表す属性情報とを含む特徴点データが生成される。さらに、この特徴点データに撮影位置を関連付けて、風景画像マッチングの参照データが生成される。
(もっと読む)
画像処理システム及び車両制御システム
【課題】高速道路だけでなく一般道を含め様々な車両走行路の走行中においても画像認識を用いて正確な自車位置検出が可能となる技術の構築。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。所定形状の道路区間において撮影した撮影画像及び当該撮影画像の撮影位置を入力するデータ入力部と、前記道路区間内の任意の地点を特定地点として、前記道路区間を通過するための前記特定地点での目標運動量を規定する目標運動量設定部と、前記特定地点での前記撮影画像から生成された被マッチングデータを、特定地点の位置及び特定地点における目標運動量と関係付けて、前記参照データとしてデータベース化する参照データデータベース化部とを備えている。
(もっと読む)
ナビゲーション装置、ETC車載器およびこれらの料金情報通知方法
【課題】料金の増額をともなわずに有料道路を一旦降りて有料道路外の施設を利用し、再度有料道路を利用可能なサービスが受けられることを確実に把握することができる「ナビゲーション装置、ETC車載器およびこれらの料金情報通知方法」を提供する。
【解決手段】判定手段28により、(1)指定出口を通過したこと、(2)指定施設を利用したこと、(3)到達した入口付近に対応する入口が指定出口に対応する指定入口であること、(4)指定出口を通過してから対応する指定入口の入口付近に到達するまでの所要時間が制限時間よりも所定時間以上短い時間であること、がすべて満足されたと判定された場合に、制御手段30により、通知手段22による利用料金の通知を禁止すること。
(もっと読む)
物体検出装置
【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
駐車位置案内システム
【課題】適切な駐車位置をドライバが見つけることをより容易にするとともに、ユーザにとっての快適性をより損ないにくい駐車位置案内システムを提供する。
【解決手段】通信範囲が駐車場の入口ゲート周辺の所定範囲に限定されたDSRC通信によって車載器6が駐車場サーバ2へのアクセス情報を取得した場合に、このアクセス情報を用いて自動的に車載器6と駐車場サーバ2とを接続し、当該DSRC通信よりも通信範囲の広い携帯電話網通信で駐車場サーバ2から車載器6が空きスペースの位置を示す空きスペース位置情報を受信できるようにする。そして、当該携帯電話網通信が可能となった後は、駐車場サーバ2から送信される空きスペース情報の受信を車載器6が逐次行うとともに、当該空きスペース情報に基づいて駐車位置の案内を行う。
(もっと読む)
交通カメラ画像を表示する方法及び交通カメラ画像表示システム
【課題】必要なときに、交通カメラ画像が表示できるようにすること。
【解決手段】車両の挙動をモニタリングし、当該車両の挙動に基づいて交通事象の存在を判定し、交通カメラによる道路の画像を受信し、交通事象が検出された場合に、その交通カメラ画像をディスプレイに表示する。
(もっと読む)
目標物検出装置及びプログラム
【課題】 自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供すること
【解決手段】 自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
車両用充電支援装置、車両用充電支援方法、コンピュータプログラム
【課題】駐車動作完了前に、障害物を考慮した理想位置での充電に関する情報を通知可能な車両用充電支援装置、車両用充電支援方法及びコンピュータプログラムを提供する。
【解決手段】給電ユニット70が埋設された駐車枠75への駐車を開始すると、駐車枠75周辺の障害物80の位置及び形状の検出(S1)と、駐車枠75の位置及び形状の検出(S2)と、駐車枠75内の給電ユニット70の位置の検出(S3)を行う。給電ユニット70の位置に基づいて、バッテリ60の充電効率が最も高い駐車位置を最適位置に特定し(S4)、最適位置における自車両65と障害物80の距離を判定する(S5)。判定結果に応じて理想位置を特定し、当該理想位置におけるバッテリ60の充電効率及び理想位置を通知する(S10)。
(もっと読む)
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
鞍乗り型車両の方向指示器自動解除装置及び方向指示器自動解除方法
【課題】方向指示器の方向指示の解除動作について、自動的に且つ交差点の道路形態によることなく適切なタイミングで行うことが可能な方向指示器自動解除装置を得る。
【解決手段】位置情報検出手段56と地図情報記憶手段55から車両の現在位置が交差点位置であることを判定し、ヨーレート検出手段57から車両の旋回開始状態と車両の進行方向を検出し、地図情報記憶手段55の交差点情報と車両の進行方向の検出結果から進行する道路を確定し、進行方向に対しての現交差点の終了位置を算出し、ヨーレート検出手段57の出力値が所定値以下で所定時間出力した場合を旋回終了時と判断し、車速を基に旋回開始位置からの車両の移動量距離を求め、移動距離が前記交差点の終了位置を通過したことを検出した時、方向指示器51の動作を解除する制御を制御部4で行う。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御装置において、燃費の向上を可能とする。
【解決手段】車両が予め設定された所定の道路勾配区間を走行中であるかを検出する勾配検出部41と、所定の道路勾配区間における車両の走行状態を記憶する走行状態記憶部42と、記憶された道路勾配区間を走行する車両の走行状態に基づいて変速段が適した変速段かどうかを判定する変速段判定部43と、変速段が適した変速段でなかったときにより適した変速段を再設定して記憶する変速段再設定部44とを設ける。
(もっと読む)
2,061 - 2,080 / 10,839
[ Back to top ]