
Fターム[2F129BB47]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | ハイブリッド (898)
Fターム[2F129BB47]に分類される特許
221 - 240 / 898
測位装置、測位方法およびプログラム

【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
測位方法および装置

【課題】本発明は測位装置に関し、マルチパス多発地帯でも受信手段の出力の異常判定を正確に行い、測位装置の位置精度の低下を防ぐ方法および装置を提供する。
【解決手段】上記課題は、擬似距離から算出された受信位置と、ドップラ周波数から算出された受信速度及び受信方位を分けてそれぞれの有効性判定を行うことにより、受信状況が直達波,直達波と反射波の合成波,反射波であるかを判定し、直達波を受信している時には受信位置を測位位置とし、直達波と反射波の合成波を受信したときでも、受信速度及び受信方位を有効と判定できる場合には、直前の受信位置を基に受信速度及び受信方位から測位装置の位置を補正して測位位置を求めることにより解決される。
(もっと読む)
走行支援で利用される情報の信頼度特定装置、方法およびプログラム
【課題】多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
(もっと読む)
光ビーコン車載通信装置
【課題】共通ID番号のデータがDSSS用データのID番号であるかVICS用データのID番号であるかを確実に判別することができるようにする。
【解決手段】光ビーコン車載通信装置1において、送受信装置2の不揮発性メモリ2dは、ID番号の優先順位を、共通ID番号、DSSS固有ID番号の順に記憶し、制御CPU2cは前記優先順位に従って光ビーコンデータを並び替えし、制御装置10は、並び替えられた光ビーコンデータにおいて共通ID番号のデータの直後に前記DSSS固有ID番号のデータが有るときには当該共通ID番号の光ビーコンデータをDSSS用データでのID番号のデータとして判断し、共通ID番号のデータの直後にDSSS固有ID番号のデータが無いときには当該共通ID番号のデータをVICS用データでのID番号でのデータとして判断する。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【課題】無線通信システムにおける遠隔ユニットの地理的位置を決定するための方法及び装置を提供する。
【解決手段】無線通信システムでは、移動局の位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。
(もっと読む)
地図表示方法および地図表示装置
【目的】表示する地図の縮尺率を大きく(広域表示に)した場合にも、道路アイコンに対応した道路が分かりやすい「地図表示方法および地図表示装置」を提供することにある。
【構成】地図の縮尺率に応じたアイコンを記憶し、表示部に表示される地図の縮尺率を検出し、該表示部の表示画面内に表示すべきアイコンが存在するか否か判断し、表示すべきアイコンが存在する場合には、該地図の縮尺率に対応したアイコンを読み出し、該表示部に表示される地図上の所定の位置に読み出したアイコンを表示する。
(もっと読む)
データコードラベルを使った、移動局用の位置情報へのアクセス
移動局用の位置情報はデータコードラベルを用いて捕捉され、その位置情報はグローバルポジショニングシステム(GPS)などのサテライトポジショニングシステム(SPS)からの信号を必要とせずに移動局が動くと更新される。前記のデータコードラベルは読み取られ、そしてそのデータコードラベルの中で符号化された情報は、例えば、ディスプレイやスピーカを通して提供されることができる非ナビゲーション情報あるいは道順、デジタル地図などであり得る位置情報を得るために使われる。前記位置情報はローカル座標システムもしくはグローバル座標システムに参照されることができる。前記の移動局の位置は移動局内の慣性センサを使用して、および/またはデータコードラベル内で符号化された情報を使って得られ得るワイアレスアクセスポイントアルマナックおよび測定した無線信号を使用して更新される。その後、更新された移動局用の位置情報が提供される。 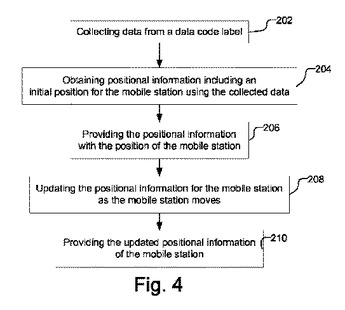 (もっと読む)
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
ナビゲーション装置の地図表示方法およびナビゲーション装置
【目的】地図上に走りにくい道路を識別可能に表示する「ナビゲーション装置の地図表示方法およびナビゲーション装置」を提供することである。
【構成】道路の部分毎に走りやすさと走りにくさとを区別して記憶し、表示している地図の縮尺率が広域に変更された場合、該広域縮尺率の地図を表示し、該表示する広域縮尺率の地図上に走りにくい道路部分が存在するか否か判断し、走りにくい道路部分が存在する場合には、該道路部分の表示長さを算出し、該道路部分の表示長さが所定長以下の場合には、該地図上に該道路部分の表示長さを実際より長くして強調表示する。
(もっと読む)
ナビゲーション装置、情報センタ、および案内システム
【課題】ユーザの運転する車両の運行方針に影響を与える現象に対する当該車両の状況をより把握し易くすることを可能にする。
【解決手段】VICSセンタ2などから得た渋滞度の情報をもとに、自車両が通行し得る経路である通行候補経路上の各リンクの、当該通行候補経路を走行するとした場合の自車両の進行方向についての渋滞度の情報に絞って、地図画面上に重畳して表示させる画像を生成する。
(もっと読む)
自車位置選択方法及び装置
【課題】自立航法による自車位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路を優先的にマッチングさせる際に、自立航法位置とは大きく異なる道路を走行しているように表示することのない「自車位置選択方法及び装置」とする。
【解決手段】自立航法により第1自立航法位置を演算し、この第1自立航法位置を近くの道路に投影して第1マッチング位置を求め、その後所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求める。第2マッチング位置が誘導経路上のとき、第1自立航法位置を基点として第2自立航法位置を先端とする自立航法位置移動ベクトルと、第1マッチング位置を基点として第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを比較して、端間距離や比率、角度、長さや比率等の比較値を求め、これが予め設定したしきい値を超えるときには第2マッチング位置を現在位置として選択しない。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
駐車場進入/脱出検出装置及びその検出方法
【目的】駐車場進入/脱出を正確に判定できる「駐車場進入/脱出検出装置及びその検出方法」を提供することである。
【構成】 所定のタイミングで平面及び高さ方向の移動距離を計算し、上記移動距離を用いて勾配を計算し、勾配の絶対値が設定値より大きくなったとき、駐車場に進入したと判定する。前記駐車場進入が検出されたときの車両の相対高度を範囲内に含む所定の高度範囲を設定し、自車位置が前記高度範囲内に存在する場合は、脱出判定に使用する設定距離を小さくし、前記高度範囲外に存在する場合は前記設定距離を大きくし、道路と併走する併走距離を算出し、該併走距離が前記設定距離以上になったとき駐車場から脱出したと判定する。
(もっと読む)
ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステム
【課題】本発明は、ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステムを提供する。
【解決手段】ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステムが、ここに開示される。本慣性ナビゲーションシステムは、移動体の移動情報に基づいて上記移動体の位置および向きを計算するための軌道計算器と、上記軌道計算器に接続され、参照道路情報に基づいて上記移動体の位置および向きを修正するための誤差修正ユニットと、上記誤差修正ユニットに接続され、道路網の地理情報を格納し、上記道路網の地理情報に従って上記参照道路情報を提供するための記憶ユニットとを備える。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】装置の拡張や変更等に対して柔軟に対応可能な位置算出装置を実現するための手法を提案すること。
【解決手段】位置算出装置の一種である位置算出システム1には、IMU50と、GPSユニット100を組み込み可能な第1スロット60及び第2スロット70とが具備されている。そして、何れのスロットにもGPSユニット100が組み込まれていない場合には、IMU50の計測結果を用いて位置を算出し、何れかのスロットにGPSユニット100組み込まれた場合には、IMU50の計測結果とGPSユニット100の計測結果とを用いて位置を算出する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
軌道ベースのロケーション決定
ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
221 - 240 / 898
[ Back to top ]