
Fターム[2F129BB51]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | 投影法 (42)
Fターム[2F129BB51]に分類される特許
21 - 40 / 42
ナビゲーション装置
【課題】より適切な地図表示を行うことができるナビゲーション装置を提供する。
【解決手段】道路特定手段(道路特定プログラム54b等)は、現在位置検出手段により検出される現在位置に基づいてナビゲーション装置100が位置している道路を特定し、判別手段(判別プログラム54c等)は特定された道路の種類を道路情報に基づいて判別し、移動履歴記憶制御手段は移動した位置に関する情報を当該位置の通過の度に移動履歴として移動履歴記憶部532cに記憶するとともに、記憶後所定期間経過した移動履歴を削除し、判定手段(判定プログラム54e)は現在位置が所定回数以上通過した位置であるか否かを移動履歴に基づいて判定し、表示制御手段(表示制御プログラム54h等)は現在位置が所定回数以上通過した位置でないと判定された場合に道路の種類に応じて表示部3に表示させる地図情報を切り替えて表示させる。
(もっと読む)
位置表示システムおよび位置表示装置ならびにマップマッチング方法

【課題】GPS測位手段を有する端末装置を設置した列車などの移動体の位置を走行中のリンクに正しくマップマッチングできるようにする。
【解決手段】ノードと各ノード間を結ぶリンクとから構成されたネットワークデータベース38を備え、各端末装置20から測位データを受信し、ネットワークデータベース38から測位位置の周辺のリンクを抽出して何れかのリンクに測位位置をマップマッチングする位置表示システム10において、位置表示システム10は、端末装置20から受信した測位データに基づいて測位位置周辺のリンクを抽出するリンク抽出手段35と、測位データから測位ベクトルを算出する測位ベクトル算出手段36と、マッチングリンク決定手段37と、を備え、マッチングリンク決定手段37は、測位ベクトルの向きに基づいて、測位ベクトルの向きに最も近い向きを有するリンクをマッチングリンクとして決定し、端末装置20の位置を表示する。
(もっと読む)
カーナビゲーション装置および現在位置算出方法
【課題】正しい現在位置を算出できるカーナビゲーション装置を提供する。
【解決手段】狹角分岐路を通過した際に、分岐後の道路について、車両が走行している方の道路とは別の道路上に車両の現在位置が算出され、その後正しく車両の現在位置が算出されると、誤って算出された方の道路について、その道路のリンク番号とそのときの時刻や曜日等を記録する。記録されたデータをリンクの番号毎に統計処理し、車両の現在位置として誤って算出される可能性が高いリンクであると判断されると、当該リンクを信頼度trstの低減対象のリンクとして設定する。そして、次に当該分岐路を通行する際に、時間帯や曜日等が信頼度trstを低減させるべき時間帯や曜日等に当てはまると判断されると当該リンクについて算出される信頼度trstを低減させる。
(もっと読む)
車載用ナビゲーション装置
【課題】微小角分岐点におけるミスマッチングを早期に解消し、自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】マップマッチング処理手段19が、微小角分岐点検出手段20によって検出された微小角分岐点を、自車両が、複数本のマッチング候補道路における第1候補上にマッチングされた状態として通過した後に、自車両による微小角分岐点の通過後に電波航法位置検出手段17によって検出される自車位置とマッチング候補道路との距離の推移に基づいて、現在の第1候補上から前記複数本のマッチング候補道路における現在の第1候補以外の道路上へとマッチングを修正することが可能に形成されていること。
(もっと読む)
車載装置
【課題】 速走行時の正確な走行距離を取得する技術を提供する。
【解決手段】 低速走行時において、路面を撮影するカメラにより撮影された画像から、路面に描かれた点線間を走行する所要時間を取得し、取得した所要時間から車輪の回転数を算出する。又は、タイヤホイールを撮影するカメラにより撮影された画像データから車軸の回転数を算出する。算出された回転数から、走行距離を算出する。
(もっと読む)
車載用ナビゲーション装置及び自車位置修正方法
【課題】マップマッチングによる自車位置の修正及びそれに基づいた画面表示を行うにあたり、画面上での自車位置の変動を大いに縮小し、安定した自車位置の表示に寄与することができる「車載用ナビゲーション装置及び自車位置修正方法」を提供すること。
【解決手段】車線用ナビゲーション装置において、地図データを参照して(S1)自車が走行中の道路の幅員あるいは車線数に応じて複数の仮想リンクを生成し(S6)、自車位置がGPS位置を中心とする所定の距離範囲から外れたときに、該自車位置をGPS位置に最も近い仮想リンク上へマップマッチングさせ(S7)、画面に表示されている当該走行中の道路の、当該仮想リンクに対応した位置に自車位置マークを表示する(S8)。さらに、走行車線間を区分する走行車線ラインも併せて表示する。
(もっと読む)
道路地図作成プログラム、地図作成装置及び位置表示システム
【課題】道路の出口を表す新しい道を生成して、地図の精度を改善する。
【解決手段】デジタルデータ化された道路地図及び該道路地図を含む領域を撮像した写真写真画像とを用いて道路地図を作成する地図作成装置であって、提供された写真画像と提供された道路地図との地理的な位置を整合し、前記整合された航空写真から、道路本線と出口分岐道とを区画する出口分岐線の始点及び終点を抽出し、前記抽出された始点及び終点を結ぶ出口分岐線を定め、前記定められた出口分岐線に基づいて出口分岐の位置を特定することを特徴とする。
(もっと読む)
マップマッチングに適するリンク設定システム、その方法およびプログラム
【課題】マップマッチングミスを無くすこと。
【解決手段】道路幅と平行する道路の道路幅や道路ネットワークの位置関係に応じてリンクのずらす方向とずらす距離を計算してリンクを設定する。
(もっと読む)
ナビゲーション装置
【課題】有効な省エネルギー運転支援機能を提供することができるナビゲーション装置を提供する。
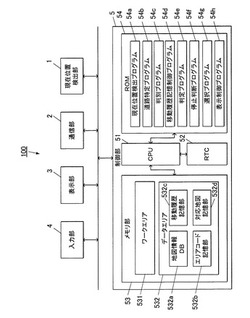
【解決手段】車両の走行状況を検出するセンサ部と、現在位置を測位するGPS受信部と、地図情報を記憶した地図記憶部と、出力手段と、を備えたナビゲーション装置10において、ナビゲーション装置10は、更に、停車判定部111と、アイドリング情報記録部18と、を備え、停車判定部111は、センサ部15の出力に基づいてアイドリングした状態で車両が所定時間以上停車したことを判定するとともに、GPS受信部12が測位した現在位置の情報および現在位置に基づいて地図記憶部から得た地図情報に基づいてアイドリングの適否を判定し、不適切なアイドリング状態にあることを示すアイドリング情報をアイドリング情報記録部18に記録する。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
車載用ナビゲーション装置
【課題】近接した道路が複数ある場合でも、より確実に現在位置を求める。
【解決手段】車載用ナビゲーション装置は、車両の前方を撮像するための撮像手段と、撮像手段により撮像した画像から車両の前方を横切る物体の存在を検知する物体検知手段と、定期的に複数の現在位置の候補点を求め、その中から一つの候補点を選択して、表示候補点に設定する現在位置算出手段とを備える。現在位置算出手段は、高速道上の候補点が表示候補点である場合で、前記車両が所定時間、停止している場合で、一般道にある候補点が信号の所定距離手前にある場合で、かつ前記物体検知手段が前記車両の前方を横切る物体の存在を検知した場合に、一般道上にある候補点を表示候補点に設定し直す。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
ナビゲーションシステム
【課題】 GPS機能を有しない、コストが低減した簡易な構成で緊急車両に搭載できる一方、現場に急行した際、より詳細な地図データを順次表示するようにして、地理が不明となるような不具合を生じさせないナビゲーションシステムを提供することを目的とする。
【解決手段】 本部側端末1を、署所と火災発生現場とを結ぶ最短のルートを地図データベース8から検索するルート検索手段18と、初期作成手段と再作成手段とからなる地図データ作成手段19と、付随情報表示手段21とを備えた中央処理装置7とで構成する一方、車載端末11を、ディスプレイ装置12と、タッチパネル22と、車両位置修正手段23と、ルート切替手段24とで構成し、前記タッチパネル22上で、現在車両位置と思われる箇所をタッチすると、現在車両位置と火災現場とを結ぶ新た地図データが本部側端末1により再作成され車載端末11に繰り返し送信されるようにする。
(もっと読む)
ナビゲーション装置および車両位置確定方法
【課題】ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止することが可能な「ナビゲーション装置および車両位置確定方法」を提供する。
【解決手段】車両の回転角度を検出する角度センサ5aの出力信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θと同じ角度をランダバウトの中心角∠A’OB’とするような点B’をマッチングポイントとして求める。このように、距離センサ5bにより検出される距離情報は用いず、回転角度変化量θを利用してマップマッチングを行うことにより、距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようにする。
(もっと読む)
車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法
【課題】 車両を取り巻く環境にかかわらず、また、他のマップマッチング技術と組み合わせることで、車両が存在する道路を精度良く特定することが可能な車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法を提供する。
【解決手段】 距離センサ5bと、制御部17とからなる車両の速度を検出する速度検出手段と、車両の期待速度の変化を示す期待速度パターンデータを、道路地図上の道路を示す道路データに関連付けて有する地図データベースとを備える車載用ナビゲーション装置10であって、速度検出手段が検出した速度に基づき、車両の速度変化を示す速度パターンデータを算出する処理と、速度パターンデータと期待速度パターンデータとを比較して、相関の度合いを算出する処理と、算出した相関の度合いに基づき、車両が存在する道路を特定する処理とを実行する制御部17を備える。
(もっと読む)
位置評定装置、位置評定方法および位置評定プログラム
【課題】 都市部などGPSの衛星補足数が十分確保できない条件下でも測位精度の劣化を防ぐことを目的とする。
【解決手段】 天空画像カメラ部110が撮影して撮像データを生成し、天空画像変換部120が撮像データを仰角・方位角面に投影する。また、DSM取得部140が各地点において天空画像カメラ部110が撮影するであろう範囲の地理データをDSMデータベース190から取得し、DSM変換部150が地理データを仰角・方位角面に投影する。そして、位置・姿勢推定部160が仰角・方位角面に投影した撮像データと各地点における地理データとを比較し、地理データが撮像データと一致する地点を天空画像カメラ部110の撮影時の位置評定装置100の位置とする。
(もっと読む)
ナビゲーション装置及び車両位置推定方法
【目的】 カーブ走行時に直線走行時と異なる方法で車両位置推定を行なう「ナビゲーション装置及び車両位置推定方法」を提供することである。
【構成】 車両回転方向計算部は車両方位の変化から車両回転方向を判別し、角速度計算部は車両の角速度を求め、回転半径計算部は該角速度と所定時間毎の移動距離とから車両の回転半径Rを求め、回転半径補正部は左回転であれば道路上の走行位置に応じた補正値WLだけ大きくなるように回転半径Rを補正し、右回転のであれば道路上の走行位置に応じた補正値WRだけ小さくなるように回転半径Rを補正し、車両位置推定部は該補正した回転半径を用いて道路中心線上に車両位置を推定する。
(もっと読む)
経路表示装置及び地図表示方法
【課題】 探索された経路が交差する場合に、先に行くべき経路を明確にすることのできる技術を提供する。
【解決手段】 地図情報と、目的地へ到達する経路とを表示する経路表示装置であって、表示される地図データの範囲内に、順番が連続せず、且つ、一方のノードのみ一致する経路の道路データがある場合、その経路の表示形態を変更する。
(もっと読む)
車載ナビゲーション装置
【課題】車両が走行している道路をより正確に認識することができること。
【解決手段】高架道路と高架道路下の道路とでは車両周辺の状況が大きく異なる点、すなわち、高架道路と高架道路下の道路とのそれぞれ特有の車両周辺の状況がある点に着目する。この着目点から、画像処理された車両周辺の画像に、道路上方に高架道路があると検出された場合、車両は高架道路下の道路を走行しており、画像処理された車両周辺の画像に、道路側方に街灯列があると検出された場合、車両は高架道路を走行していると決定する。これにより、車両が走行している道路をより正確に認識することができる。
(もっと読む)
移動通信端末機を用いた地図データ提供方法およびシステム
本発明は、移動通信端末機を用いた地図データ提供方法およびシステムに関し、より詳しくは、移動通信端末機にフルマップのサブセットで構成される地図データを提供する地図データ提供方法およびシステムに関する。本発明による地図データ提供方法は、所定の地図データ提供サーバから所定の経路と関連したシンプルマップデータを受信する段階と、GPS受信機を用いて前記移動通信端末機の現在位置の入力を受ける段階と、前記現在位置を前記シンプルマップデータにマッチングして前記移動通信端末機の表示手段に表示する段階とを含み、前記シンプルマップデータは、道路中で前記経路に対応する第1道路と関連した第1道路データ、および前記第1道路上のノードと前記第1道路上に位置していない他のノードを連結する第2道路と関連した第2道路データを含む地図データであり、前記ノードは、道路上の交差点または道路上の袋小路地点であることを特徴とする。本発明によると、移動通信端末機に所定の経路と関連した道路データおよび地点情報データのみ含む地図データであるシンプルマップデータを送信することによって、移動通信端末機に送信されるデータ量を減少させることができる地図データ提供方法およびシステムが提供される。従って、ユーザが前記地図データを要請して受信するまでの時間も短縮される。 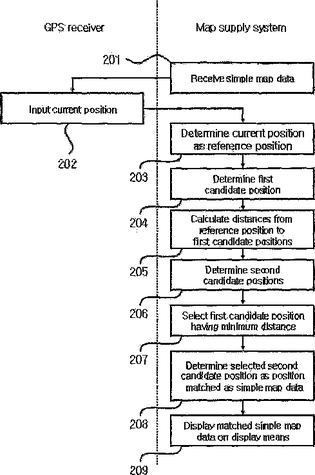 (もっと読む)
(もっと読む)
21 - 40 / 42
[ Back to top ]