
Fターム[2F129BB62]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525)
Fターム[2F129BB62]の下位に属するFターム
Fターム[2F129BB62]に分類される特許
41 - 60 / 142
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、燃費比較方法
【課題】自車両の走行区間における燃費を他車両と仮想的に競い合うことによって、利用者のエコドライブへの意欲を掻き立て、省エネルギーを推進するナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、燃費比較方法を提供することを課題とする。
【解決手段】本発明は、道路区間における車両の燃費を算出し、道路区間、車両データ、および、当該道路区間における燃費を記憶部に格納し、道路区間について、記憶部に記憶された車両データと、当該道路区間における燃費と、に基づいて燃費関連データを生成し、燃費関連データと、燃費と、を比較し、当該比較に基づく比較結果を生成し、比較結果を出力させる。
(もっと読む)
位置情報提供システム、位置情報提供方法及び測位統合装置

【課題】屋内外をシームレスに移動する利用者の位置を検出するデバイスを、適切な時期に切り替える。
【解決手段】移動体端末と、ネットワークを介して前記移動体端末と接続される測位統合装置と、を備える位置情報提供システムであって、前記位置情報提供システムは、複数の領域の各々において使用される測位方法に関する情報を保持し、前記測位統合装置は、前記移動体端末から現在地取得要求を受信した場合、前記移動体端末の位置を示す情報に基づいて、前記移動体端末の現在の位置を判定し、前記移動体端末が第1領域に位置する場合、前記移動体端末の位置を示す情報に基づいて、前記移動体端末が第2領域に接近したか否かを判定し、前記移動体端末が前記第2領域に接近したと判定された場合、前記第2領域において使用される測位方法に関する情報を取得し、前記取得した情報を前記移動体端末に送信する。
(もっと読む)
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 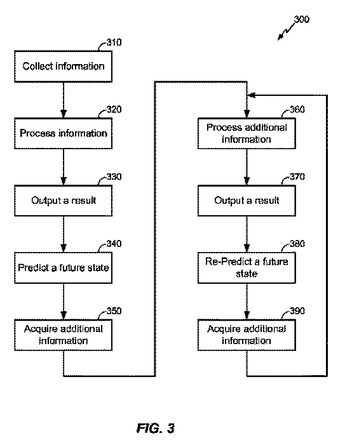 (もっと読む)
(もっと読む)
受信機
【課題】受信装置を搭載した移動体が走行している道路情報を取得し、取得した道路の軌道と受信信号から得られる情報とを用いて測位し、取得する道路情報を限定した受信装置を提供することにある。
【解決手段】移動体に備え付けられる受信装置であって、衛星信号受信手段が衛星から衛星信号を受信し、信号処理手段が前記衛星信号から衛星位置情報と、誤差を含んだ前記衛星から前記受信装置までの距離である擬似距離情報とを算出し、道路情報取得手段が、限定された道路に関する3次元の道路情報を取得し、測位計算手段が前記道路情報に基づいた軌道、前記衛星位置情報、及び前記擬似距離情報に基づいて前記受信機の位置情報を算出する。
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
衛星信号受信装置
【課題】GPS衛星などの衛星の信号の感度を向上させる。
【解決手段】S/N測定部13は、記憶部12に蓄積された航法データのS/Nを測定する。解析部14は、記憶部12に蓄積された航法データを解析する。事前確率部15は、解析部14における航法データの解析に基づいて、航法データに含まれる各ビットについて当該ビットの値が“−1”となる確率(“+1”となる確率)を求める。基準値判定部16は、S/N測定部13で測定したS/N、及び事前確率部15で求めた確率(事前確率)に基づいて、BPSK復調部11で復調を行うのに用いる基準値を判定する。この基準値は、BPSK復調部11で使用される。
(もっと読む)
移動体用測位装置
【課題】より正確な移動体の速度ベクトルを出力することが可能な移動体用測位装置を提供すること。
【解決手段】衛星電波を用いて移動体の位置を算出する位置演算手段と、衛星電波又は慣性航法により前記移動体の速度ベクトルを算出する速度演算手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、前記速度ベクトル算出手段により算出された速度ベクトルを、前記リンクのうち移動体が存すると推定されるリンクに投影した投影速度ベクトルを出力する投影手段と、前記投影手段により出力される投影速度ベクトルの採用の可否を判定する投影可否判定手段と、を備え、該投影可否判定手段により前記投影速度ベクトルを採用すべきと判定された場合に、前記投影速度ベクトルを前記移動体の速度ベクトルとして出力することを特徴とする、移動体用測位装置。
(もっと読む)
車両位置提示方法、及びカーナビゲーション装置
【課題】衛星が見渡せない場所であっても車両の現在位置を特定し、かつ、車両の現在位置の特定精度を向上させる。
【解決手段】タグ200は、各所に設けられたマンホール300内に設置されている。走行する車両400のリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取る。位置特定部603は、読み取ったタグ受信情報(ID)と登録タグ情報記憶部602の登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに地図情報上にプロットし、表示機能部606により表示する。
(もっと読む)
GPS受信機搬送波位相測定値の品質監視装置、方法、プログラム
【課題】GPS受信機において搬送波位相測定値の品質を監視する技術に関し、特別に設計した受信アンテナもしくはGPS受信機を使用しなくても、複数周波数信号対応のGPS受信機の搬送波位相測定値に生じている異常を数cm級の精度で監視し、正確に衛星を特定する。
【解決手段】測定値異常判定部3は、GPS受信機1の搬送波位相測定部2が測定した複数周波数信号に対する搬送波位相測定値に基づき、複数周波数の受信信号に対する電離層遅延項を含む線形結合量の時系列値を各GPS衛星10に対して計算する。測定値異常判定部3は、その時系列値の時間的連続性を監視することにより、不連続を生じている衛星の搬送波位相測定値を特定してその搬送波位相測定値の異常を検出する。異常が検出されなかった衛星に対して、座標計算部4で測位が実行される。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】誤マッチングを少なくすると共に、誤マッチングから早期に回復する。
【解決手段】狭角分岐通過時に推測航法だけで確実に正しい道路にマッチングさせることは難しいため、各候補地点のコスト計算において、通常のコスト計算による通常コストに、GPS座標からの距離に応じたGPSコストを加算することで速やかに正しい道路にマッチングを復帰させる。このとき、GPS座標には誤差があり、また、幅の広い道路では車両がDBリンクから離れた位置を走行していることも考えられるため、GPSの信頼度および幅員を加味してコストを算出する。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、走行軌跡の補正を適切に行う。
【解決手段】GPSの測定精度から求めた最大想定誤差eを半径とする信頼度円を求め、対応する推測位置と候補地点から信頼度円までの距離の二乗値を両地点の地点相関値sとし、推測軌跡、候補軌跡上の各地点の地点相関値を累計した値を、推測軌跡の相関値Sp、候補軌跡の相関値Sqとする。推測軌跡の相関値Spが、候補地点による推測軌跡(候補軌跡)の相関値Sqよりも悪く(大きな値)なる場合、推測軌跡の補正を行わず、相関値が良く(小さく)なる場合に推測軌跡の補正、すなわち候補軌跡を補正後の推測軌跡とする。このように、GPSの測位位置に対する信頼度だけではなく、所定区間のGPS軌跡に対する補正前後の推測軌跡の相関値を考慮することで、より推測軌跡をより正確な位置に残すことが可能となり、結果として自車位置精度の向上が可能となる。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、誤マッチングから早期に回復する。
【解決手段】推測航法により求めた推測位置P1に対し、推測方位の信頼度とGPS方位の信頼度の高い方の信頼度に基づく想定方位誤差を求め、信頼度が高い方の方位と、最適候補地点に推測位置P1を補正した場合の進行方向の方位との方位差θが想定方位誤差の範囲内にない場合には推測位置P1を補正しない。推測軌跡方位の信頼度は、前回の信頼度、想定累積方位誤差、ジャイロ左右感度学習状態から、GPS方位の信頼度は、推測方位一致度、GPS速度、DOPから決定する。これにより、画面表示では最適候補地点に車両マークを移動させることで誤マッチングであっても、実際の推測位置P1は補正させず、未補正の推測位置P1を基準に次の推測位置P2を求めるので、次回以降のマッチング処理で、より早く正しい道路に車両マーク及び推測位置を復帰させることができる。
(もっと読む)
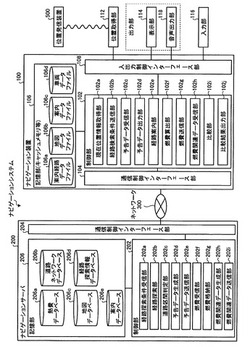
ナビゲーション装置、位置決定システム及び方法
ナビゲーション装置(200)は、識別できる基地局(282,286,290)によってサポートされた無線通信ネットワーク(280)を介してデータを通信する無線通信ユニット(228)を備える。装置(200)は、使用中に、作動環境(262)をサポートするように構成された処理リソース(202)をさらに備え、作動環境(262)は、無線通信ユニット(228)によって受信できる、識別できる基地局(282,286,290)のアイデンティティの少なくともいくつかを、現在位置において無線通信ユニット(228)から受信するように構成された位置決定モジュール(268)をサポートする。位置決定モジュール(268)は複数のデータ関連付けエントリを含むデータ記憶部(214,160)にアクセスすることがでる。データ関連付けエントリの各々は、識別できる基地局のいくつかの記憶されたアイデンティティと、いくつかの記憶されたアイデンティティが受信できる位置に関連付けられた位置識別子とを含む。位置決定モジュール(268)はさらに、複数のデータ関連付けエントリからいくつかの記憶されたアイデンティティに関連する現在位置を決定するように構成されている。 (もっと読む)
車載用ナビゲーション装置
【課題】車両に関する盗難を防止する車載用ナビゲーション装置
【解決手段】 車両の現在位置を検出する現在位置検出手段と、施設データおよび地図データを記憶する記憶手段と、目的地の指定を行う入力手段と、出力手段と、前記入力手段により目的地が指定されると前記地図データを用いて該目的地までの最適経路を探索し、前記出力手段を介して経路案内を行う制御手段と、を備えた車載用ナビゲーション装置において、前記施設データには、少なくとも施設毎の位置と種別、さらに盗難情報が含まれており、前記制御手段は、前記目的地の前記盗難情報に基づき、前記目的地が盗難多発施設か否かを判別し、前記目的地が盗難多発施設でないとき、前記目的地から所定範囲内に前記目的地と同種別の盗難多発施設が存在するか否かを検出し、前記目的地と同種別の盗難多発施設の存在を検出すると前記出力手段を介して盗難警告を出力することを特徴とする。
(もっと読む)
自律運転乗物用の制御及びシステム
ナビゲーション及び制御システムは、乗物の位置及び進行方向を示すポジション信号を生成するように構成される1つ以上のポジションセンサを含む。このシステムは、入力を有し、乗物の動作を制御する出力を生成する1つ以上の動作制御機構を含み、動作制御機構から離れた内蔵式自律型制御器を含む。自律型制御器は、ポジションセンサからポジション信号を受信し、乗物の更新された移動経路を定める動作制御信号を生成するように構成されるプロセッサと、ポジションセンサ、動作制御機構、及びプロセッサの間で通信を行うプログラマブルインタフェースとを含む。プログラマブルインタフェースは、ポジションセンサからのプロセッサへの入力を正規化し、動作制御機構への入力として加えられる適合する動作制御信号を生成するように構成され、それによって内蔵式自律型制御器は、様々な異なるセンサ及び異なる動作制御機構と共に動作するように構成可能である。  (もっと読む)
(もっと読む)
車載情報処理装置、情報処理方法およびプログラム
【課題】高頻度で指定され得る目的地について、簡易な操作でルート案内を開始できるようにすることを課題とする。
【解決手段】予め自宅等の所定地点の地点情報を保持する所定地点情報保持機能部55aと、ユーザが操作を開始するにあたっての起点となる基本画面に表示される、所定地点を目的地に設定してルート案内を開始させるための「自宅」ボタンの画像を生成するボタン画像生成機能部51dと、「自宅」ボタンを含む基本画面をタッチパネル21に表示させる映像処理機能部57と、「自宅」ボタンがユーザによって操作されたことを検知するユーザ操作検知機能部51bと、を備え、「自宅」ボタンへの操作が検知されると、所定地点情報保持機能部55aによって保持される地点情報を用いて所定地点へのルートを検索し、索出されたルートに従ってルート案内を行う、ナビゲーション装置1とした。
(もっと読む)
情報処理装置、画像処理装置、及び画像処理プログラム
【課題】車内に配置されたタッチパネルに表示される操作ボタンの操作性を低下させることなく、並べて表示された各画面の境界の位置を変更可能にする情報処理装置、画像処理装置、及び画像処理プログラムを提供することを課題とする。
【解決手段】情報処理装置1であって、タッチパネル21と、ナビゲーション画面と所定画面とを並べた画面にナビ操作ボタンが配置された画像を生成する画像生成部57と、タッチパネル21でナビゲーション画面が占める表示範囲の変更要求を受け付けると、タッチパネルに表示されるナビゲーション画面と所定画面との境界の位置が変更されるように、画像生成部57を制御する境界制御部51と、を備え、画像生成部57は、ナビ操作ボタンがタッチパネル21の表示面の一部を画定する所定領域に表示されるように画像を生成すると共に、変更要求を受け付けると、所定画面が所定領域に侵入しない範囲で境界の位置が変更されるように画像を生成する。
(もっと読む)
画像照射システムおよび画像照射方法
【課題】HUD上のPOI情報表示の視認性を向上させる画像照射システムおよび画像照射方法を提供する。
【解決手段】画像照射システムが、車両の運転者を撮像する撮像部と、撮像された画像から運転者の単眼位置を算出する第1の算出部と、車両位置を算出する第2の算出部と、車両走行方向を算出する方向算出部と、複数の対象物とこれら対象物の位置を表す位置情報とを記憶する記憶部と、算出された車両位置と算出された走行方向と記憶された対象物の位置情報との関係から、走行方向に存在する1以上の対象物を選択する第1の選択部と、選択された対象物の第1の画像を含む第2の画像を生成する画像生成部と、算出された単眼位置に基づいて生成された第2の画像の投影位置を決定する決定部と、生成された第2の画像を決定された投影位置に照射する照射部と、を具備する。
(もっと読む)
ナビゲーション装置および商品注文処理方法
【課題】経路の周辺に存在する所望のドライブスルーを選択して、予め商品を注文できるナビゲーション装置において、注文の取消し処理、代金の返還処理を可能とする。
【解決手段】サーバ30から取得したメニュー画像を用いて商品を注文する注文手段13と、注文した商品の調理時間をサーバ30から取得する調理時間取得手段21と、店舗への到着予想時刻を算出する到着予想時刻算出手段15と、到着予想時刻と調理時間とに基づいて注文を確定する時刻または該時刻の車両の所在位置を算出し、注文の確定を判別する注文確定判別手段22とを備え、注文確定判別手段22が算出した注文を確定する時刻または該時刻の車両の所在位置に基づいて、ナビゲーション装置20が該時刻または所在位置に到達するまでの間、サーバ30に注文の取消しのデータの送信を許可し、注文を取消した場合、サーバ30から代金相当のクーポンを受信し、クーポン記憶手段25に記憶する。
(もっと読む)
ナビゲーション装置および商品注文処理方法
【課題】経路の周辺に存在する所望のドライブスルーを選択して、予め商品を注文することができるナビゲーション装置において、注文のキャンセル処理を可能とする。
【解決手段】ナビゲーション装置20は、選択した所望の店舗のサーバ30と通信するための通信手段16と、サーバ30から取得したメニュー画像を用いて商品を注文する注文手段13と、注文した商品の調理時間をサーバ30から取得する調理時間取得手段21と、店舗への到着予想時刻を算出する到着予想時刻算出手段15と、到着予想時刻と調理時間とに基づいて注文を確定する時刻または該時刻の車両の所在位置を算出し、注文の確定を判別する注文確定判別手段22と、を備え、注文確定判別手段22が算出した注文を確定する時刻または該時刻の車両の所在位置に基づいて、ナビゲーション装置20が該時刻または所在位置に到達するまでの間、サーバ30に注文の取消しのデータの送信を許可する。
(もっと読む)
41 - 60 / 142
[ Back to top ]