
Fターム[2F129BB62]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525)
Fターム[2F129BB62]の下位に属するFターム
Fターム[2F129BB62]に分類される特許
101 - 120 / 142
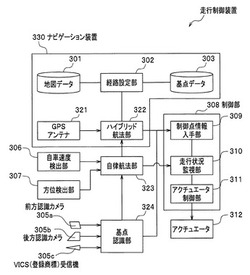
走行制御装置、走行制御方法、および、走行制御プログラム
【課題】車両の現在位置の計算誤差をもとにして、車両制御の制御範囲を拡大することにより運転者に利便性を提供すること。
【解決手段】 本発明は、出発地から目的地までの経路を設定する経路設定部302と、経路設定部302が設定した経路中に存在する基点および制御点の位置情報を記憶手段から入手する情報入手部と、現在の走行車両の位置が情報入手部により入手された基点の位置に到達したことを認識する基点認識部324と、基点認識部324が認識した最新の基点からの走行距離を所定距離として求める走行状況監視部310と、現在の走行車両の位置が情報入手部により入手された制御点の位置に到達したときに、走行状況監視部310が求めた所定距離が短いほど高度な走行車両の制御を実施する制御部308と、を有することを特徴とする。
(もっと読む)
位置検出装置、位置検出方法、位置検出プログラム及びナビゲーション装置

【課題】電源投入後に現在位置を表示できるまでの時間を短縮できるようにする。
【解決手段】ナビゲーション装置1は、静止状態であり、且つ当該ナビゲーション装置1がクレードル4に装着されているときに、環境情報処理部30により地磁気値TM、位置情報PS及び方向情報DRを記憶部13に記憶させておき、動作停止状態から電源が投入され起動した際、クレードル4に装着され、静止状態であり、且つ記憶部13に記憶している地磁気値TMと現在の地磁気値TMとの差分が所定閾値未満であれば、周囲環境が変化していないものと判定し、記憶部13に記憶している電源切断前の位置情報PS及び方向情報DRを現在の位置情報PS及び方向情報DRとして復元することにより、電源投入後直ちに現在位置を認識することができるので、当該現在位置に応じた地図画面や経路案内画面等を提示することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム
【課題】本発明は、衛星からの信号を受信できないときであっても、信頼性の高い高精度な移動体の現在位置を提示できるようにする。
【解決手段】本発明は、衛星からの信号を受信していたときに予め学習しておいた加速度センサの移動体に対する取付角度の学習程度が高ければ、その学習結果を用いた推定した自律速度の信頼性が高いと考え、その自律速度をナビゲーション動作に用い、学習程度が低ければ自律速度の信頼性が低いと考え、その自律速度を用いるのではなく、衛星からの受信情報に基づいて算出された移動体の走行速度をナビゲーション動作に用いるように切り換えることができるので、ナビゲーション動作の信頼性を一段と向上させることができる。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マルチパス波の影響を低減するとともに、各送信局の配置の偏りによる測位計算の精度の低下を低減し、従来技術に比較して高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マスク処理部23と、位置及び速度算出器22と、マッチング部35とを備える。マスク処理部23は、受信無線信号に基づいて、ナビゲーション装置10の進行方向に対する各GPS衛星の相対方位と、各GPS衛星の仰角とを算出し、算出された相対方位及び仰角に基づいて当該各GPS衛星を測位算出に使用しないようにマスクする。位置及び速度算出器22は、マスクされない各GPS衛星から受信した無線信号に基づいて自車位置を算出する。マッチング部35は、所定の地図データと、速度ベクトル算出器33により算出された速度ベクトルと、位置及び速度算出器22により算出された自車位置とに基づいて現在位置を特定する。
(もっと読む)
通信システム
【課題】通信システムにおいて、通信帯域を無駄に占有することなく、移動端末装置または車載装置が必要なデータを取得できるようにする。
【解決手段】通信システム1においては、ナビゲーション装置10が携帯電話機30に対して一対一で通信するよう構成されている。そして、携帯電話機30およびナビゲーション装置10のうちの少なくとも一方の装置に備えられた近距離無線通信モジュール18,36は、自己の記憶部に格納されたデータの少なくとも一部を送信する。また、携帯電話機30およびナビゲーション装置10のうちの他方の装置に備えられた近距離無線通信モジュール18,36は、送信されたデータを受信する。よって、一方の装置は、他方の装置と一対一で通信を行うことによりデータを取得することができるので、広域通信網における通信帯域を無駄に占有することなく、必要なデータを外部から取得することができる。
(もっと読む)
衛星ナビゲーション受信機の性能を高めるシステム及び方法
【課題】衛星ナビゲーション受信機の性能を高める。
【解決手段】GPS受信機102は、高精密(例えば、原子)クロック発生源106及び処理装置108を備える。処理装置は、複数の宇宙基地の衛星送信機からの複数の測定信号を受信処理し、クロック発生源を制御して精密周波数を生成させる。処理装置は、例えば5以上の測定信号が受信された場合、従来のRAIMを実施して周波数誤差をモデル化し、受信した測定信号が4以下の場合、3つの位置エラーを計算し、複数の現在のクロック位相オフセット値を推定し、3つの位置エラーに対するポスト更新測定誤差を画定し、該ポスト更新測定誤差を正規化し、モデル化された複数の周波数誤差の値の増大をモデル化し、3つの位置誤差値及びモデル化されたクロックエラーを使用して保全性をチェックする。
(もっと読む)
位置情報利用装置
【課題】POIへの立ち寄りをより正確に認識し、POIへの立ち寄りをトリガとする車両制御を行うための技術を提供する。
【解決手段】POI認識処理部33は、走行軌跡処理部31及びマップマッチング処理部32により算出された現在位置と、ジャイロセンサ23及びステアリングセンサ24からの検出信号とに基づき、自車両がPOIに立ち寄ったか否かを判定する。そして、自車両がPOIへ立ち寄ったと判定した場合、当該判定の精度に関する認識自信度を算出する。そして、車両制御ECU27は、この認識自信度に応じた動作モードで車載機器に対して当該POIに対応する所定の動作を実行させる。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、参照位置Pが静止条件Bを満たすか否かを判断する静止条件判断手段と、静止条件Bを満たす参照位置Pと、測位によって算出した現在の測位位置Pgを平均化して平均位置Pavを算出する平均位置算出手段と、平均位置Pavを出力する位置出力手段と、平均位置Pavを参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
移動体搭載測位装置及びその測位方法
【課題】移動体搭載の測位装置において、位置データを受信することが出来る衛星の数が不足している場合でも、GNSS衛星からのデータのみで測位演算をすることによって、移動体搭載の測位装置の小型化、単純化を図る。
【解決手段】位置データを受信できる衛星が不足した場合には、過去の測位データから現在の車両1の速度ベクトルを推定して、車両1はこの速度ベクトルを延長した直線30上を走行しているものとして、GNSSデータから求めたGNSS衛星20と車両1との距離ρ1を用いて、車両1の測位位置を特定する。
(もっと読む)
GPS測位による位置算出装置
【課題】 GPS測位環境や移動体の高さ方向の動きを監視して、3次元測位を判定するためのしきい値を動的に決定する「GPS測位による位置算出装置」を提供する。
【解決手段】 GPS測位を利用して移動体の位置を算出する位置算出方法は、GPS測位環境の良否を判定するステップと(S101)、測位環境が悪いと判定されたとき、しきい値を下げるステップと(S102)、測位環境が良好と判定された場合に移動体の高さ変動があるか否かを判定するステップ(S103)と、高さ変動があると判定されたとき、しきい値を上げるステップと(S104)を含み、PDOP値がしきい値より大きい場合には2次元測位を行い、PDOP値がしきい値以下の場合には3次元測位を行う。
(もっと読む)
ナビゲーション装置及びナビゲーション表示方法
【課題】GPS等を使用したナビゲーションを行う場合において、衛星信号の受信可否情報を地図上に表示させるようにする。
【解決手段】測位衛星からの信号を受信して移動体の現在位置を算出し、算出された現在位置周辺の別位置における測位衛星からの信号受信の可否を、測位地点周辺建造物の三次元情報を用いて判断し、受信可否判定結果を、移動体の現在位置及び測位位置周辺の地図上に重畳して表示させるようにした。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部230により探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置がマップマッチングにより得られた場合、再ルート探索制御部240が、推奨ルート上に車両が存在しないことが確実であると判断できるか否かを判定する。この判定の結果が肯定的であったときには、再ルート探索制御部240が、直ちに、再ルート探索指令をルート探索部230へ送る。この再ルート探索指令を受けたルート探索部230は、再ルート探索を行う。
(もっと読む)
現在地検出装置、地図表示装置、および現在地検出方法
【課題】地図表示装置等で使用される現在地検出装置において、自身の位置をより高精度に検出できるようにする。
【解決手段】位置補正処理では、地図情報から位置情報が対応付けられた目標物の情報が抽出された場合に、レーダが検出した被測定対象物の相対位置を取得する。次いでGPS受信機等により検出された現在地、および被測定対象物の相対位置に基づいて、被測定対象物の絶対位置を推定する。そして絶対位置が推定された被測定対象物から、目標物までの距離を算出し、算出した距離が予め設定された閾値未満である場合に、レーダにより検出された被測定対象物を目標物として認識する。そして、目標物の位置情報、および目標物との相対位置に基づいて自身の絶対位置を算出し、GPS受信機等により検出された現在地を、該算出した絶対位置に補正する。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
車両位置推定装置及び車両位置推定方法
【目的】GPS受信データより得られるGPS位置及びGPS速度を用いて、GPS受信情況が悪くなっても車両位置を正しく推定して表示する「車両位置推定装置及び車両位置推定方法」を提供することである。
【構成】GPS衛星より受信したGPS受信信号より算出されるGPS位置に基づいて車両位置を推定する車両位置推定装置において、(1)車両の進行方向履歴を進行方向履歴保存部に保存し、(2)GPS位置とGPS速度とGPS進行方向とから次の位置測定時刻における車両位置と車両が存在する可能性のある位置範囲を予測し、(3)GPS位置が前記予測位置範囲内に存在すれば該GPS位置を現在位置とみなし、(4)予測位置範囲内に存在しなければ、予測位置を現在位置とみなすと共に、該現在位置とGPS速度と保存されている車両進行方向とから次の車両位置と車両位置範囲を予測する。
(もっと読む)
通信端末
【課題】GPSにより取得した測位データを選別可能な通信端末を提供する。
【解決手段】測位ポイントPnで測位した後(S25)、前回、取得した有効な測位ポイントPaと、今回測位したPnとの距離差Ldを算出する(S26)。算出した距離差Ldが、移動体の限界移動距離L以下のときに、測位ポイントの測位データを有効と判断し(S27にてYES)、地図上へのロギングをする(S32)。
(もっと読む)
位置検出装置、位置検出方法、位置検出プログラムおよび記録媒体
【課題】移動量に伴う誤差を累積することなく、的確な位置検出を図ること。
【解決手段】オプティカルフロー算出部202は、任意のルート上を走行する移動体の側方に関する一連のフレーム画像に基づいて、オプティカルフローを算出する。そして、距離算出部203は、算出されたオプティカルフローと、移動速度検出部201によって検出された車両401の移動速度と、に基づいて被写体までの距離を算出する。地物特定部204は、算出された被写体までの距離に基づいて、被写体がどのような地物であるかを特定する。位置検出部205は、特定された地物の地点データと、算出された被写体までの距離と、に基づいて、移動体の現在位置を検出する。
(もっと読む)
移動体用位置推定装置
【課題】道路形状や周辺環境に影響されずに高精度に移動体の位置を推定する移動体用位置推定装置を提供すること。
【解決手段】移動体に搭載され、移動体の位置を推定する移動体用位置推定装置に、移動体に搭載された慣性航法センサ群(加速度センサ、ヨーレートセンサなど)の出力に基づいて移動体の位置を推定する第一の推定手段と、少なくともノード情報を含む地図情報を記憶した記憶手段と、ノード情報から予測された移動体の予想移動軌跡に基づいて移動体の位置を推定する第二の推定手段と、第一の推定手段により推定された移動体位置と第二の推定手段により推定された移動体位置とを合成処理して移動体の最終推定位置を決定する合成手段とを備える。
(もっと読む)
101 - 120 / 142
[ Back to top ]