
Fターム[2F129BB62]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525)
Fターム[2F129BB62]の下位に属するFターム
Fターム[2F129BB62]に分類される特許
61 - 80 / 142
車両用減速制御装置及び車両用減速制御方法
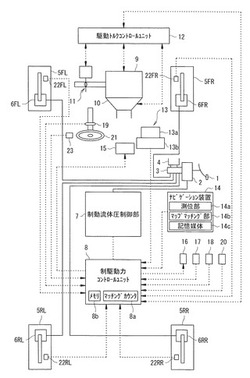
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びプログラム

【課題】トンネルの状況を直観的に把握すること。
【解決手段】
自車が走行する経路を含む地図画像を表示するナビゲーション装置において、自車が走行するトンネルの形態を表すトンネル案内画像P1が表示される。この例の場合、入口から出口までのトンネル全体を横から見たときの断面が模式的に描かれている画像を含むトンネル案内画像P1が表示される。
(もっと読む)
位置推定方法、サーバ、測位端末及び測位システム
【課題】測位端末の位置をより正確に求めるための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、GPS測位位置と当該GPS測位位置において通信可能な各基地局BSそれぞれの基地局信号の信号強度とを対応付けた端末データを蓄積記憶した端末データベースを有している。そして、携帯型電話機2の実在位置において通信可能な各基地局BSそれぞれの基地局信号の信号強度を当該携帯型電話機2から受信し、端末データベースの中から、携帯型電話機2から受信した基地局信号の信号強度に適合する信号強度を選出することで端末データを抽出する。そして、抽出した端末データに記憶されているGPS測位位置を用いて携帯型電話機2の位置座標を推定して、携帯型電話機2に送信する。
(もっと読む)
衛星ナビゲーション・システムにおけるステータス・レポートの最適化方法
【課題】衛星ナビゲーション・システムにおけるステータス・レポートを最適化する方法を提供する。
【解決手段】衛星ナビゲーション・システムの通信網に関する情報を求める情報取得ステップ(S10)と、求めた前記情報を、ステータス・レポートとして、1つまたは複数のナビゲーション・メッセージを介して伝送する情報伝送ステップ(S12)とを含む。
(もっと読む)
姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法
【課題】歩行者が携帯した場合でも自身の姿勢を特定することができる姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法を提供する。
【解決手段】座標変換部31は、装置直交3次元座標(X、Y、Z)と基準直交3次元座標(x、y、z)との間の座標変換を、ピッチ角α、ロール角β、ヨー角γをパラメータとして行う。角度算出部32は、座標変換部31での座標変換に3軸加速度センサ22で検出したデータを適用することにより、ピッチ角α、ロール角β、ヨー角γを算出する。姿勢特定部30は、基準となる基準直交3次元座標(x、y、z)に対するピッチ角α、ロール角β、ヨー角γを求めることにより、自身の姿勢を特定する。
(もっと読む)
車輌用位置推定装置、車輌用位置推定方法、および車輌用位置推定プログラム
【課題】GPS、自律センサ、マップマッチングなどの従来型自車位置特定手段が有効に機能しない状況において、自車位置を一定の誤差以下の精度で特定可能な自車輌位置推定装置等を提供すること。
【解決手段】車車間通信手段101が現在位置の特定された周辺車輌からの現在位置情報を取得し、自車輌位置補正手段102が該現在位置情報を自車輌位置として記憶するように構成した。これにより、従来型の自車輌位置特定手段が有効に機能していない状況においても車車間通信電波の最大到達距離以下の精度で自車輌位置を特定し得る。
(もっと読む)
方位特定装置、方位特定方法及びコンピュータプログラム
【課題】車両の進行方位を高精度に特定することができる方位特定装置を提供する。
【解決手段】算出した車両の方位角度に基づいて車両の進行方位を特定する方位特定装置において、まず、ジャイロセンサで車両の旋回角度を検出する。GPS信号に基づいて方位角度θn(n=0,1,2,)を算出する。方位角度θn及び旋回角度の所定時間内における変化量を算出する。算出した変化量に基づいて、算出した方位角度に対する信頼性を判定する。判定した信頼性に応じて、算出した方位角度及びジャイロセンサで検出した旋回角度に基づいて車両の進行方位を特定する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】測位精度を向上させること。
【解決手段】GNSS衛星により送信された測位信号に基づいて測位演算を行うGNSS受信装置は、山により影響を受ける測位信号を送信するGNSS衛星を選択するGNSS衛星選択手段と、GNSS衛星選択手段により選択されたGNSS衛星をマスクして測位演算を行う第1の測位演算手段とを有する。
(もっと読む)
位置測定装置
【課題】 移動体の位置測定をする際に、移動体の位置の測定結果に変化が生じた場合であっても、精度よく移動体の位置を測定することができる位置測定装置を提供する。
【解決手段】 VTOL機1は、GPS−GYRO7と、GPS−GYRO7の検出結果に基づいて、VTOL機1の位置の変化を検出する位置制御部6とを備えている。また、位置制御部6には、ファン2を駆動するACモータ3が接続されており、電源5からACモータ3に供給される電流の電流値をモニタリングしている。ここでモニタリングしている電流の電流値が所定の電流値を下回った場合に、GPS−GYRO7で検出されたGPS緯度経度情報に基づく位置データを補正することなく、VTOL機1の現在位置を求める。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
歩行者誘導装置、コンピュータプログラム及び歩行者誘導方法
【課題】歩行者に対して目的地点までの経路を効果的に誘導することができる歩行者誘導装置、コンピュータプログラム及び歩行者誘導方法を提供する。
【解決手段】経路特定部179は、歩行者の現在位置から目的地点までの経路をすべて歩行した場合の歩行距離L1を算出するとともに、交通機関を利用して目的地点まで到達する経路での歩行距離L2を算出する。経路特定部179は、算出した距離L1がL2よりも所定の閾値以上長いときには、交通機関を利用した経路を選択する。経路特定部179は、選択した経路上に所定の経由地点があるか否かを判定し、経由地点がある場合、その経由地点を特定する。歩行者誘導部20は、経路特定部179で特定された経路上の経由地点へ歩行者を誘導する。また、歩行者誘導部20は、歩行者が最後の経由地点に到達した場合、目的地点へ誘導する。
(もっと読む)
位置情報処理装置、位置情報処理プログラムおよび移動体端末
【課題】信頼性の高い測位情報を適切に選択することを課題とする。
【解決手段】測位情報の信頼性の度合いを示す信頼性指数を、移動体端末に装着されたGPS受信部によって測位された測位情報に関して算出する。また、移動体端末に装着された自律航法測位部によって測位された測位情報を用いて累積移動距離を算出し、当該累積移動距離を用いることで、信頼性指数を、当該自律航法測位部によって測位された測位情報に関して算出する。そして、信頼性指数が示す信頼性の度合いについて、いずれが高いかを比較する。比較した結果、信頼性の度合いが高いとされた信頼性指数に対応する測位情報を、位置情報の導出に用いる測位情報として選択する。
(もっと読む)
電離層補正値を算出するネットワーク及び方法
本発明は、電離層補正値を計算し、衛星ナビゲーションシステムのユーザに提供することを可能にするネットワークに関し、ネットワークが、
− 衛星(GNSS)によって伝送されたナビゲーション信号の遅延を計測可能な機上搭載のRF受信機(21)をそれぞれが備える複数の航空機(2)によって構成される航空ユーザセグメントと、遅延の前記測定値を地上セグメント(300)に伝送するための、複数の航空機(2)と地上セグメント(300)との間の航空データ通信手段(5)と、を備える航空セグメント(200)と、
− グリッドの計算に使用される遅延の計測値であり、複数の航空機(2)から及び複数の地上局(SBAS G)からもたらされる遅延の計測値を、地上セグメント(300)のレベルで受信する手段と、を有することを特徴とする。 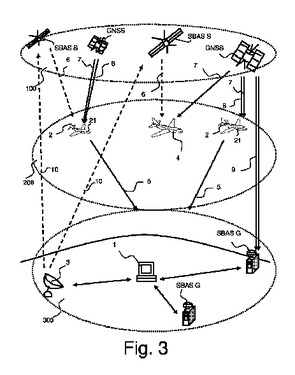 (もっと読む)
(もっと読む)
衛星ナビゲーションシステムのインテグリティのリアルタイム監視用の装置および方法
本発明は、衛星ナビゲーションシステムのインテグリティ(11)の表示を推定する手段を提供する計算装置であって、ナビゲーションシステムによって計算されたデータを測定することによって、非常に低確率のロケーションエラーに対してシステムのインテグリティ(11)の表示をリアルタイムで推定する手段を含み、これらの手段が
−ロケーションシステムによって計算されたデータを受信する手段、
−ロケーションエラーの分布モデル(H)を推定する手段、
−分布モデル(H)を特徴づけるパラメータを推定する手段、
−非常に低確率のロケーションエラーの分布のモデリングを可能にする分布モデルを特徴づけるパラメータの関数として極値理論を適用する計算手段、
−非常に低確率のロケーションエラーのためにインテグリティ(11)の表示をリアルタイムで推定する手段、
−リアルタイムでインテグリティ(11)の表示を送信する手段
を含むことを特徴とする計算装置に関する。  (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】衛星測位が不能となった場合に有益な経路案内を行う「ナビゲーション装置」を提供する。
【解決手段】衛星測位の不能状態が発生した時点の自車位置303である第0基準地点通過後の、推奨ルート301上の最初の右左折交差点である304が、第1番目の進路変更地点として算定され(a)、この第0基準地点と第1番目の進路変更地点とを含む範囲の地図を、推奨ルート301を表す推奨ルート図形312と共に表す案内地図320が、第1番目の進路変更地点の案内情報330と共に表示される。案内情報330には、第1番目の進路変更地点である交差点の交差点名称331や、当該交差点の目印や構造を表す案内画像332や、当該交差点の推奨ルート301に従った通過方向を表す図形333や、第0基準地点から第1番目の進路変更地点までの道程距離334や、当該道路区間の道の特徴の表示335を含める。
(もっと読む)
電子機器
【課題】ラジオ放送の受信とは関係しない経路案内画面などの画面を表示中であっても、受信中のラジオ放送の放送電波の受信電界強度を表示する。
【解決手段】車載用電子機器は、表示部16と表示部の表示を制御する表示制御部を含む制御手段10とを備え、ラジオ放送受信部11は、該ラジオ放送受信部で受信中の放送局の放送電波の電界強度を検出する手段を含み、車載用電子機器がラジオ放送を受信し、録音データ記憶部に録音するとともに、ラジオ放送以外の機能を起動して表示部にラジオ放送以外の機能に基づく表示画像を表示中に、制御手段は、前記ラジオ放送受信部が検出した受信中の放送局の放送電波の電界強度に基づき、表示部に表示中の表示画像の一部に前記ラジオ放送の受信状態を示す受信状態報知画像を表示する。
(もっと読む)
精度不良を検出するための装置を備えるナビゲーションシステム
【課題】電離層誤差データを用いて、保護限界を精度良く求める。
【解決手段】複数の送信機から複数の信号を受信するように動作可能な受信機を有する車両用のナビゲーションシステムは、プロセッサ16と、メモリデバイス18とを備える。メモリデバイス18は、機械読取り可能命令を格納しており、当該命令は、プロセッサ16によって実行されると、プロセッサ16が、複数の信号から導出される擬似距離測定値に対応する1組の誤差推定値を求めること、電離層遅延データを用いて、主ナビゲーション解の誤差共分散行列を求めること、及び解分離技法を用いて、誤差共分散行列に基づいて、少なくとも1つの保護レベル値を求めることを可能にする。
(もっと読む)
ナビゲーション装置
【課題】不要な処理負荷の増大や消費電力の増加などを生じることなく、自車両の補正精度を向上させる。
【解決手段】ナビゲーション装置は、複数の自車位置候補点を算出し(ステップS10)、各候補点に対して信頼度を算出する(ステップS20)ことにより、自車両の位置を検出する。その後、所定のカメラ動作条件を満たすか否かを判定する(ステップS30)。その結果、カメラ動作条件を満たすと判定されたときには、カメラ動作指令を出力して(ステップS40)、カメラに画像情報を取得させ、反対にカメラ動作条件を満たさないと判定されたときには、カメラ停止指令を出力して(ステップS60)、カメラによる画像情報の取得を禁止する。そして、カメラにより取得された画像情報に基づいて、検出された自車両の位置を補正する(ステップS70〜S90)。
(もっと読む)
空気循環システム
【課題】測定誤差が生じるような状況にあっても遮蔽区域で内気循環と外気導入とを確実に切り替えることができる空気循環システムを提供する。
【解決手段】空気を室内で循環させる内気循環モードにするか外気を導入する外気導入モードにするかを切り替える空調制御部1と、現在位置を測位する測位部11と、地図データを記憶した地図データ記憶部13と、測位部で測位された現在位置が、地図データ記憶部から読み出した地図データによって示される遮蔽区域の手前の第1の所定距離から該遮蔽区域を通過した後の第2の所定距離の範囲にある場合に、空調制御部に内気循環モードへの切り替えを指示する制御部15を備えている。
(もっと読む)
改善されたナビゲーション装置及び方法
比較的弱いGPS信号のみが利用可能な場合の、ナビゲーション装置(500)の位置を決定する方法と、このような状況で自身の位置を決定できるナビゲーション装置とが説明される。この方法は、複数のGPS衛星(51−54)から複数のGPS信号(502)を受信する工程と、衛星のそれぞれに特有の識別情報とともに信号の一部を構成するタイミング情報から、距離情報を決定する工程と、信号のそれぞれの一部をさらに構成する、衛星のそれぞれに特有の軌道歴データペイロードの全体を受信及び格納することを試みる工程とを含む。この方法はさらに、無線通信プロトコルを用いて、近傍の装置(508)との通信(510)を確立する工程と、近傍の装置が、特定された衛星についての衛星位置に関する軌道歴データ又は軌道歴データの特定の部分を、既に格納していることを判定する工程と、特定された衛星についての軌道歴データ又は軌道歴データの特定の部分を、要求及び受信する工程と、ナビゲーション装置が続けて、距離情報と、距離情報が決定された衛星に特有の無線で受信された軌道歴データと、を用いてナビゲーション装置の位置を決定する工程と、を含むことを特徴とする。 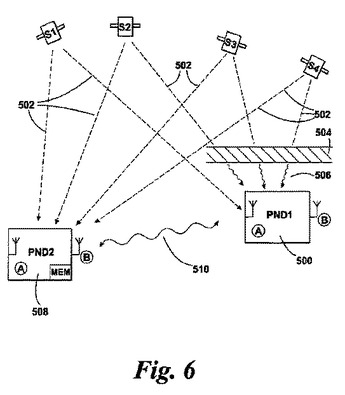 (もっと読む)
(もっと読む)
61 - 80 / 142
[ Back to top ]