
Fターム[2F129BB63]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | 受信不可 (254)
Fターム[2F129BB63]に分類される特許
241 - 254 / 254
現在位置算出装置
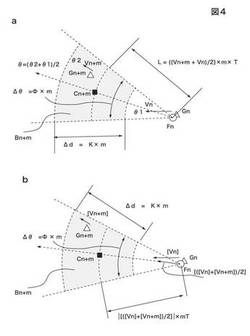
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
車載ナビゲーション装置及び自車位置推定方法

【課題】屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができるようにする。
【解決手段】周回走行判定部27が走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。周回走行判定部27により自車が周回走行を行っていると判定された場合、自車位置推定部24は、走行軌跡記憶部26に記憶されている周回走行の走行軌跡と、走行距離検出部22により検出された自車の走行距離とに基づいて、自車位置を推定する。
(もっと読む)
ナビゲーション装置
【課題】駐車場へ進入したにも関らず、付近の道路上に現在位置が求められるのを防止する。
【解決手段】ナビゲーション装置は、駐車場への進入と脱出を、GPSの受信状態と車両の高度に基づいて判定する。具体的には、ナビゲーション装置は、GPS受信装置が受信状態から非受信状態になり、その後受信状態に戻った場合において、かかる受信状態から非受信状態になったときの第1の高度と、その後受信状態に戻ったときの第2の高度との差を求め、求めた差が、予め定めた値以上の場合、車両が屋上の駐車場に在るとして、マップマッチングを行わず、道路上以外に現在位置を求める。
(もっと読む)
ナビゲーション装置
【課題】装置筐体に取り付けられた3軸加速度センサを用いて、距離センサによる走行距離の検出精度を高める。
【解決手段】ナビゲーション演算装置3は、車両への取り付け後最初に電源が投入され且つ車両が静止していることを条件に、車両に取り付けられたナビゲーション装置筐体の傾きを3軸加速度センサ4の前後、左右、鉛直方向の検出軸の出力として検出してその出力値を取付姿勢の基準値として記憶する。車両の走行中、3軸加速度センサ4の出力値の平均値と現在設定されている基準値とを加重平均することにより、基準値を車両水平状態での値に補正する。3軸加速度センサ4の出力値と補正した基準値とに基づいて車両の傾きを求め、その車両の傾きにより距離センサ6の出力による走行距離を補正する。
(もっと読む)
測位装置
【課題】
周波数の推定に要する時間を短縮し、誤った周波数でロックされることのない測位装置の提供を図る。
【解決手段】
測位装置16は、信号処理部4で、測位用衛星Gからの信号を第1のPLL回路により追尾し、測位用衛星Fからの信号を第2のPLL回路により追尾する。インターフェイス20で移動体の移動情報を受け付ける。測位演算部15で、衛星Gと衛星Fの移動によるドップラーシフトと、ドップラーシフトの移動体の移動分と、衛星発振器のドリフトと、衛星Gを追尾するための第1のPLL回路の周波数修正値と、から、衛星Fを追尾するための第2のPLL回路の周波数修正値を算出する。
(もっと読む)
位置測定システム
【課題】 切り立った山に囲まれたダムのような人工衛星からの電波が直接受信できない領域を移動体が移動する場合も、簡単な構造であるにもかかわらず、GPSを用いて正確に測定することができるようにする。
【解決手段】 移動体20と、そして、GPS機能を備えた飛行体30とを含んで構成されてなるGPSを用いた位置測定システムであって、飛行体30は、移動装置と、移動体との相対位置を計算可能な移動体位置計測装置32−34と、及び、移動体位置計測装置によって計測した位置データを移動体に送信する送信装置36とを有しており、移動体20は、飛行体30から送信される位置データを受信する受信装置と、及び、受信した位置データを保存する記録装置とを有している。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置及びナビゲーション用プログラムを記録した記録媒体
【課題】GPSの利用が困難な地域において、目標地点まで移動するためのナビゲーションシステム、ナビゲーション装置及びナビゲーション用プログラムを記録した記録媒体を提供する。
【解決手段】ナビゲーションシステムは、GPS受信機と測量機器3とコンパスデータ処理装置4とからなる。コンパスデータ処理装置4の表示部8には、地図情報Zが表示されるとともに、座標データが既知の任意の目標地点Gと開始地点Sとが設定される。そして、開始地点S又は当該開始地点Sを基に既知点となった所定地点と、現在地点との相対位置関係(距離データ及び方位角データ)を取得するといった、いわゆるコンパス測量の手法により、現在地点の座標データを算出し、これを基に目標地点Gまで移動するためのナビゲーション情報を表示する。
(もっと読む)
電子アルバム作成装置、電子アルバム作成システム、及び、電子アルバム作成プログラム
【課題】GPS機能により位置データが取得できない場合でも、走行ルートを算出することができ、画像データをリンクできる電子アルバム作成装置を提供する。
【解決手段】GPS機能を有する位置データ取得装置3から取得された位置データと、デジタルカメラ1で取得した画像データとをリンクさせるデータリンク手段28と、地図データを記憶する地図データ記憶手段25と、画像データにリンクされた位置データに基づいて、走行ルートを算出するルート算出手段29と、地図上に画像を走行ルートに対応させて表示させるための画像表示手段31とを備えた電子アルバム作成装置であって、位置データの取得に連動して作動するジャイロセンサー7からの補間用位置データを取得可能な補間データ取得手段24と、GPSからの位置データが得られていない場合、補間用位置データに基づいて走行ルートを補間するルート補間手段32とを備えている。
(もっと読む)
ナビゲーションシステム、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測すること。
【解決手段】累積部11は、車両の加速度又は加速度に対応する値を加速度値として取得し、その累積値を算出する。車速算出部12は、GPSで得る位置の変化量に基き車速を算出し、記録部13は、同じ時点における前記累積値と前記車速との各組を対応付けて対照データDとして記憶メディア部5に記録する。推定処理部14は、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、対照データDを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する。
(もっと読む)
走行支援装置
【課題】 車両位置の測位精度を向上させることができる走行支援技術を提供する。
【解決手段】 走行支援装置10は、車両800の進行方向および走行速度に基づく車両800の位置である自律位置を測位する自律測位部112と、道路上において天球CSが地物PFによって遮られる態様を示す天球情報Dspを含む道路地図情報Irmを記憶する記憶部120と、GPS信号を送信する複数のGPS衛星910の中から幾つかを天球情報Dspに基づいて選択する衛星選択部114と、選択されたGPS衛星910から送信されるGPS信号に基づく車両800の位置である他律位置を測位する他律測位部116と、測位された他律位置を用いて、自律位置に生じる累積誤差を補正する誤差補正部118とを備える。
(もっと読む)
測位システム及び測位方法及び移動体端末及び地図サーバ装置
【課題】 例えば、移動体端末がより短時間で測位衛星を捕捉することを目的とする。また、例えば、移動体端末が閉空間から開放空間に移動した直後の測位精度を向上させることを目的とする。
【解決手段】 受信装置700は、GPS衛星500から航法データを受信し、航法データの軌道情報を送信する。無線LANアクセスポイント600は、受信装置700が送信した軌道情報を携帯電話機300に伝送する。携帯電話機300は、無線LANアクセスポイント600から軌道情報を受信する。携帯電話機300は、閉空間から開放空間に移動すると、GPS衛星500から航法データを受信する。携帯電話機300は、受信装置700から受信した軌道情報とGPS衛星500から受信した航法データとを用いて測位を行う。
(もっと読む)
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置が開示されている。開示されている方法は、電子デバイスによって記録された場所を表すデータを当該データの完全性または精度のうちの少なくとも1つを向上させるべく処理すること、処理されたデータから位置決定を導出すること、および、導出された位置決定のうちの少なくとも1つを既知の移動コースと整列するべく修正することを含む。 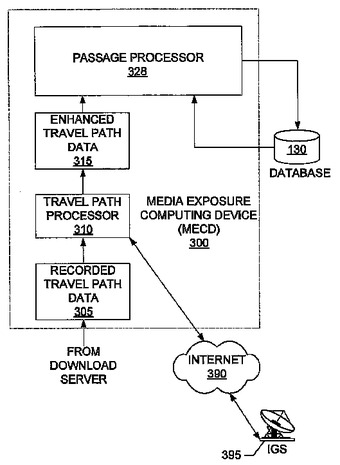 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 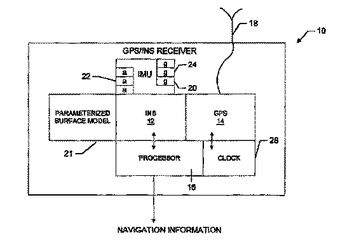 (もっと読む)
(もっと読む)
移動通信端末機の位置情報を用いたナビゲーションサービス提供方法
本発明による移動通信端末機の位置情報を用いたナビゲーションサービス提供方法は、(1)ユーザの第1端末機の位置情報を検出する段階と、(2)検出された前記第1端末機の位置情報を出発地情報として受け取る段階と、(3)所定の目的地情報を受け取る段階と、(4)前記出発地情報と前記目的地情報に基づいて所定の経路情報を出力する段階と、(5)前記出力された経路情報を前記ユーザの前記第1端末機に提供する段階と、(6)前記ユーザの第2端末機でのGPS信号の受信可否を判断する段階と、(7)GPS信号を受信することができる場合、前記GPS信号を介して出力される前記ユーザの位置情報に基づいて前記経路情報を補正する段階と、(8)前記補正された経路情報を前記第1端末機に提供する段階とを含む。 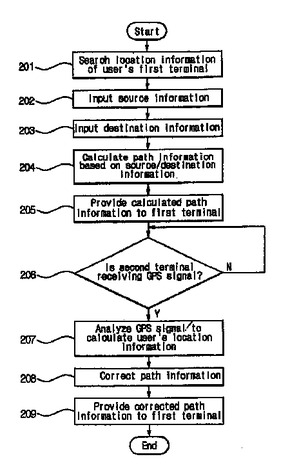 (もっと読む)
(もっと読む)
241 - 254 / 254
[ Back to top ]