
Fターム[2F129BB63]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | 受信不可 (254)
Fターム[2F129BB63]に分類される特許
181 - 200 / 254
現在位置の概略地図をディスプレイに予め表示する携帯端末及びプログラム
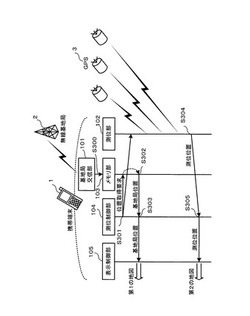
【課題】現在位置の測位中又は測位失敗であっても、現在位置に基づく概略的な地図情報を表示することによって、利用者の利便性を高めることができる携帯端末及びプログラムを提供する。
【解決手段】地図をディスプレイに表示する携帯端末であって、当該携帯端末が無線基地局と交信した際に、基地局位置情報を取得する基地局交信手段と、基地局位置を記憶するメモリ手段と、当該携帯端末の現在位置を測位する測位手段と、地図をディスプレイに表示する際に、メモリ手段に対して基地局位置を要求すると同時に、測位手段に対して測位位置を要求する測位制御手段と、測位制御手段によって取得された基地局位置に基づく第1の地図をディスプレイに表示した後、測位位置に基づく第2の地図をディスプレイに表示する表示制御手段とを有する。
(もっと読む)
位置検出装置及び位置検出方法

【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
ロケーションベースのトラッキング
ここに開示される主題は、RF環境の変化に応じて、位置決定方式を使用して位置フィックスを得ることに関する。  (もっと読む)
(もっと読む)
地図表示システム、地図表示装置および地図表示方法
【課題】所望のタイミングで音声案内データに関連付けられた音声案内テキストデータを表示するようにした地図表示システムを提供する。
【解決手段】地図データと音声案内データを含む案内経路データに基づいて地図を表示手段に表示するとともに所定のタイミングで音声案内データを出力する地図表示システムにおいて、音声案内データに関連付けられた音声案内テキストデータを記憶するデータ保存メモリ250と、テキストデータ表示リンク抽出手段243と、テキストデータ表示調整手段245と、を備え、テキストデータ表示リンク抽出手段243は表示する地図データについて、表示領域内に存在する案内経路の道路リンクを抽出し、テキストデータ表示調整手段245は、抽出された案内経路の道路リンクの画像上またはその画像の近傍に、データ保存メモリから読み出された音声案内テキストデータを案内経路に沿って表示する。
(もっと読む)
現在地測位装置及び方法
【課題】ナビセンサ14(GPSセンサ)による現在地測位不調期間では、Gセンサ15の出力に基づき現在地を測位するポータブルナビゲーション装置10において、現在地の精度を改善する。
【解決手段】ナビセンサ14の検出信号をカルマンフィルタにより処理して、該検出信号中の白色性ノイズを除去して、最適推定加速度を抽出する。最適推定加速度に基づき、移動量を算出する。ナビセンサ14による測位正常期間の所定の現在地を始点に設定し、該始点からの移動量に基づき現在地を測位する。
(もっと読む)
ハイブリッド車両
【課題】道路地図データ上で走行モードが設定されていない場所を走行する場合でも、その場所に応じて適切な走行モードに切り換えることが可能なハイブリッド車両を提供する。
【解決手段】施設ないし敷地を示す道路外エリアデータおよび道路地図データに基づき、道路地図上において車両の走行エリアを特定し、車両が道路外エリアを走行中であると特定した場合に、車両の走行動力源として走行駆動用モータを用いるモータ走行モードと、同じく内燃機関エンジンを用いるエンジン走行モードとのいずれを採用するかを決定するための走行モード決定参照情報を、車両上に設けられた道路地図データとは別の参照情報源より取得し、その走行モード決定参照情報に基づいて走行モードを切り換える構成により提供可能である。
(もっと読む)
車両用経路案内装置
【課題】情報センタから経路・案内データを受信できない場合であっても、車両を目的地まで案内することができる車両用経路案内装置を提供する。
【解決手段】出発位置から目的地までの経路を案内するための経路・案内データを分割して情報センタから移動側へ送り、該データに基づいて移動側で経路案内を行なう通信型経路案内システムにおいて、移動側に、移動側を目的地に案内するためのデータを格納する記憶装置と、経路・案内データを情報センタから受信できないことを検出する検出手段と、前記検出手段により、受信ができないことを検出した場合、前記記憶装置に格納されたデータにより目的地への経路を案内する案内実行手段と、を備えた。従って、通信不能地域の走行などが原因で、情報センタから経路・案内データを受信できない場合であっても、車両を目的地まで案内することができる。
(もっと読む)
現在位置算出装置
【課題】駐車場内の車両の位置を正確に算出できる現在位置算出装置を提供する。
【解決手段】駐車場入口に進入後、車両10の高さ方向の移動量が駐車場の1階層分の高さと等しくなったと判断され、かつ、そのときの車両10の進行方位と、駐車場入口進入時の車両10の進行方位との差が所定の角度θ1以内である場合には、駐車場入口進入時の車両10の進行方位と一致するように、算出された車両の進行方位を補正するように構成した。これにより、駐車場で車両10が旋回を繰り返しても、ジャイロセンサ11aの誤差による車両10の進行方位のずれが補正されるので、駐車場内の車両10の位置を正確に算出できる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、自動車
【課題】非接触慣性航法装置を用いた際に、GPS測位が困難な経路上での精度の高いナビゲーションを実現できるようにすることを課題とする。
【解決手段】道路ネットワークに対応するXYZ座標系の3次元座標データに対応させて、事前に撮影された情景のオプティカルフロー情報を記憶する3次元座標DB22および地図・音声・OF情報DB23を使用する。非接触慣性航法装置を有するナビゲーションセンサ6を用いて、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、カメラ7から取得される画像のオプティカルフロー情報と地図・音声・OF情報DB23のオプティカルフロー情報とのマッチングを行い、不一致の際は、3次元位置情報の補正を実行する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、自動車
【課題】非接触慣性航法装置を用いた際に、経路状態に応じて精度の高いナビゲーションを実現できるようにすることを課題とする。
【解決手段】3次元座標DB22は、道路形状に応じて自動車の移動に加速を伴うと予測される座標位置に対してあらかじめ属性を付与した3次元座標データを記憶する。ロケーションコンピュータ21は、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、ナビゲーションセンサ6においてあらかじめ設定された閾値以上の加速度を検出した場合、属性を参照して、加速度の変化をキャンセルして移動距離を補正して、3次元マップマッチングを実行する。
(もっと読む)
ナビゲーション装置
【課題】運転者が、進入しようとする道路が正しいかどうかを正確に判断することができる案内を提示できるナビゲーション装置を提供する。
【解決手段】現在位置を算出する現在位置算出部11と、地図データを格納した地図データベース2と、車両の中から見た画像を画像データとして格納した画像データベース3と、現在位置の周辺の地図データを地図データベースから読み出して地図を生成する地図表示制御部13と、地図データに基づき交差点を検出する交差点検出部21と、現在位置が交差点検出部で検出された交差点の手前の所定距離の地点になった場合に、該交差点から進行方向に分岐した複数の道路に進んだ場合の交差点通過時の画像データを画像データベースから読み出して案内画像を生成する案内画像生成部22と、地図表示制御部で生成された地図と一緒に案内画像生成部で生成された案内画像を表示するディスプレイ装置7とを備えている。
(もっと読む)
測位装置、電子機器、測位不適衛星判定方法及びプログラム
【課題】測位に不適な測位用衛星を適切に判定すること。
【解決手段】道路及び道路の区間毎に定められた仰角マスクデータの中から、仮計測等によって判断された仮の現在位置に対応する仰角マスクデータが択一的に選択される。そして、当該現在位置を基準とした各捕捉衛星の天空位置と、選択された仰角マスクデータとに基づいて、測位不適衛星が判定される。
(もっと読む)
衛星測位方法及び衛星測位システム
【課題】 減衰した衛星受信信号であっても超高感度でかつ応答性良く自己位置を知るこ
とができ、しかも、衛星の正確な位置に基づいて自己位置の計算ができ、精度が極めて高
い衛星測位方法を提供することを目的とする。
【解決手段】 衛星Sからの信号を受信すると共に外部基地局1との間において情報通信
する受信機端末11が自己位置の計算を行う衛星測位方法である。衛星Sから受信機端末11
が受信した衛星受信信号の航法データと外部基地局1から受信機端末11が受信した外部航
法データとを比較して、外部航法データの遅延時間を算出する。遅延時間に基づいて受信
機端末11が衛星受信信号を処理する際の衛星位置を推定する。推定した衛星位置に基づい
て擬似距離を求め自己位置の計算を行う。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置
【課題】立体駐車場や地下駐車場などのように、GPS信号を受信できない場所であり、かつ道路以外の場所において、自車位置の検出精度を向上するナビゲーションシステムを提供する。
【解決手段】GPS受信部14によるGPS信号の受信結果、自車両が道路上を走行しているか否かの判定結果、および自車両の走行速度に基づいて、自車両が立体駐車場や地下駐車場など、GPS信号を受信できない場所であり、かつ道路以外の場所にいるか否かを判定する。このような場所にいると判定した場合は、振動ジャイロ11、車速センサ12および加速度センサ13の検出結果に基づいて自律航法により求められる自車位置候補点と、ミリ波レーダ2による障害物の検出結果とに基づいて、自車位置を特定する。
(もっと読む)
歩行ナビゲーション方法、システムおよびプログラム
【課題】 自律航法による歩行ナビゲーションの精度を向上させる。
【解決手段】 単位質量に作用する重力と慣性力の合成ベクトルを示すデータを加速度データとして出力する三次元加速度センサから前記加速度データを任意区間内の離散時間に取得し、前記加速度データに基づいて前記三次元加速度センサの加速度の水平成分と鉛直軸成分とを導出し、前記加速度の水平成分の分布の長軸である水平振動軸の前記三次元加速度センサの姿勢を基準とする傾きを統計演算により導出し、前記加速度の前記水平振動軸成分の振動位相と前記加速度の鉛直軸成分の振動位相とのずれに基づいて前記水平振動軸に平行な二方向のうちいずれか一方向を前記任意区間における前記三次元加速度センサの姿勢を基準とする歩行方向として判定する、ことを含む。
(もっと読む)
測位装置及び測位情報受信方法
【課題】衛星からの測位情報を継続して受信することができない状況下でも、短時間での位置計測を可能とする。
【解決手段】測位装置を、常時動作する時計部1と、位置計測時にだけ動作するGPS部2とにより構成する。測位情報の受信タイミングを生成する高精度の第1のカウンター8をGPS部2に設け、GPS部2の動作の有無に関係なく連続して動作する高精度の第2のカウンター14を時計部1に設ける。位置計測の終了時に、第2のカウンター14を第1のカウンター8に同期させておき、所定時間内における再計測時には、第1のカウンター8を第2のカウンター14に同期させる。再計測を開始した時点における測位情報の受信タイミングと送信タイミングとのズレが少なく、再計測時における測位衛星の捕捉作業が短時間に行える。
(もっと読む)
安全支援情報提供車載システム
【課題】道路地図情報に基づく予測車両位置を通信情報として、立体交差などでの誤判定を防ぐとともに、判定装置および通信装置を追加するのみで、安価な安全支援情報提供車載システムを得る。
【解決手段】車両の予測車両位置を道路地図情報106に基づき求める車両位置予測装置110と、予測車両位置を他車両との間で通信する通信装置120と、車両および他車両の各予測車両位置を比較する判定装置119と、ドライバに情報を提供する表示再生装置109を備えている。道路地図情報106には立体交差情報が付加されており、平面的な予測車両位置に立体的な情報を加えて送信する。自車両の予測車両位置および道路の高さ情報を通信で他車両に送信し、受信側では車両および他車両との各予測車両位置および高さ情報を比較して、衝突可能性を判定する。
(もっと読む)
方位判別装置、方位判別方法及び方位判別プログラム
【課題】本発明は、簡易な構成で移動体の方位や位置を正確に求め得るようにする。
【解決手段】本発明は、車両に設置された二軸加速度センサ3により、当該車両が旋回したときの遠心力によって発生する移動体の進行方向と直交した横G値を検出し、横G値と所定の閾値TH1、TH2とに基づいて車両が右旋回したか左旋回したかを判別することにより、角速度センサを用いることなく単一の二軸加速度センサ3だけの簡易な構成で車両の旋回方向を正確に判別することができる。
(もっと読む)
音声再生装置、音声再生方法、プログラム
【課題】自動車の障害物警告システムなどとして、より付加価値の高いものを提供する。
【解決手段】警告音として楽曲データA,B,C,Dの組を記憶保持しておく。これらの楽曲データは、例えば、その音声内容が異なっており、例えば楽曲データA,B,C,Dの順で緊張感が強くなる曲調とされる。そして、障害物距離センサにより障害物までの距離Disを検出し、この距離Disに応じて楽曲データA,B,C,Dのうちから対応するものを選択して再生出力するようにされる。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
181 - 200 / 254
[ Back to top ]