
Fターム[2F129FF13]の内容
航行(Navigation) (246,646) | 通信技術の利用 (43,197) | ネットワーク (17,095) | 無線 (14,729) | 他車 (360)
Fターム[2F129FF13]に分類される特許
41 - 60 / 360
通話システム、車載装置、及び交換機
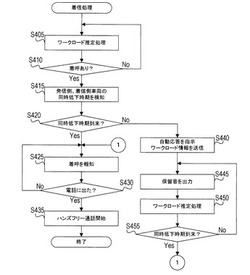
【課題】車両を運転中のドライバが互いに通話を行う場合において、双方のドライバが余裕を持って通話を行うことができる通話システムを提供する。
【解決手段】ハンズフリー装置は、自車両(着信側車両)における現在から未来にかけてのワークロードの変化を示すワークロード情報を生成する(S405)。そして、ハンズフリー装置に接続された携帯電話に、他の車両(発信側車両)におけるワークロード情報の受信を伴う着呼があると、着信側車両と発信側車両との双方でワークロードが同時に低下する同時低下時期を検知し(S415)、同時低下時期の到来後に、上記着呼のあったことを報知する(S425)。
(もっと読む)
制御装置

【課題】送信先の通信装置が指定されることなく送信された所定の情報を受信したときに、当該受信した所定の情報が自車に対するものである可能性が高いと見込まれるときに限り、当該受信した所定の情報に基づいて所定内容について報知する制御装置を提供すること。
【解決手段】他の通信装置から送信される所定の情報を受信する受信部を有する通信部と、前記所定の情報が示す内容に対応した累積回数を記憶する記憶部と、前記累積回数が所定回数に達したか否かを判定する制御部と、前記累積回数が所定回数に達したときに前記所定の情報が示す内容について報知する報知部とを備えることとする。
(もっと読む)
キャッシュ管理装置およびデータ配信システム
【課題】車車間通信により交換される、位置に関連した情報を効率よくキャッシュする。
【解決手段】各車両は、自車両の走行予定経路、キャッシュに保持しているデータの種類、位置情報を含む状態通知メッセージを周囲の車両に送信する。状態通知メッセージによって、自車両が保持しているデータのそれぞれについて、他のどの車両がそのデータを要求しているのかと、そのデータを提供可能であるかを判断可能である。要求者数の多いデータほど、また、提供者数の少ないデータほど優先的にキャッシュに格納されるようにキャッシュ管理を行う。他車両が自車両と同一方向に走行し、かつ、自車両が保持しているデータを保持している場合は、この他車両はこのデータの提供者であると判断する。他車両が自車両と反対方向に走行し、かつ、自車両が保持するデータを保持していない場合は、この他車両はこのデータの要求者であると判断する。
(もっと読む)
走行環境認識装置
【課題】車両の走行環境を高精度で認識する。
【解決手段】任意の地点を原点とする絶対座標系における自車両の位置及び向きを特定し(S20)、その絶対座標系をグリッドに分割して自車両の走行の障害となるものの占有確率をグリッドごとに記憶した占有グリッドマップを作成して、占有確率をベイズ推定により更新する(S30〜S50)。具体的には、自車両前方に存在する物体を検出するレーザレーダ20、自車両周辺に存在する他車両から送信されたその他車両の位置に関する情報を受信する通信機50、及び、車線境界線の位置を特定可能な地図データを記憶する地図データベース40からの各情報に基づき、占有グリッドマップのグリッドごとに占有確率を別々に求め(S30,S40)、それらを占有グリッドマップのグリッドごとに融合することで、自車両の走行の障害となるものの占有確率を求める(S50)。
(もっと読む)
交差点情報取得装置、交差点情報取得方法及びコンピュータプログラム
【課題】交差点の属性を正確に特定することを可能にした交差点情報取得装置、交差点情報取得方法及びコンピュータプログラムを提供する。
【解決手段】交差点を走行する各車両4から交差点の通過態様をプローブ情報として取得し、取得した各車両4の交差点における通過態様毎に、該通過態様が示す車両4の通過する前後の交差点の他の車両4の通過態様に基づいて交差点の属性候補を対応付け(S21)、通過態様毎に対応付けられた交差点の属性候補の内で比率が最も高い種類の属性候補を、該交差点の属性に特定し(S22)、特定された交差点の属性に基づく走行支援を車両4で実行させるように構成する。
(もっと読む)
運転支援装置、情報配信装置、運転支援方法及びコンピュータプログラム
【課題】取得した逆走車両情報に基づく適切な運転の支援を行うことが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】複数の取得元から逆走車両を特定する逆走車両情報を取得し(S1〜S4)、取得した逆走車両情報の取得元の種類を特定し(S6)、特定された取得元の種類に基づいて取得した逆走車両情報の信頼度を判定し(S7)、判定された信頼度に基いて、自車両に対する逆走車両を回避する為の運転の支援を行う(S8〜S10)ように構成する。
(もっと読む)
車両用ナビゲーション装置
【課題】複数の車両でグループ走行し、共通の目的地に向かう際、目的地の変更に対応した各車両の経路を効率的に探索できるとともに、目的地の変更に対する各車両への影響を最小限とすることのできる車両用ナビゲーション装置を提供する。
【解決手段】複数の車両の現在位置または出発地から共通の目的地までの各経路を探索する経路探索手段22と、前記複数の車両の前記各経路が合流する合流地点を算出する合流地点算出手段20と、前記目的地を変更する目的地変更手段12と、を備え、前記経路探索手段22は、前記目的地が変更されたとき、前記合流地点と変更後の前記目的地との間の前記各経路を新たな経路として探索する。新たな経路の探索は、他の車両に搭載された車両用ナビゲーション装置のそれぞれにおいて行わせることもできる。
(もっと読む)
移動体通信装置
【課題】運転者に関する情報(運転者情報)に基づいて移動体と他の移動体とが接触する危険性があることを示す所定の報知を行う移動体通信装置を提供すること。
【解決手段】移動体に備えられ、前記移動体の運転者情報を取得する運転者情報取得部と、前記移動体の車両情報を取得する車両情報取得部と、少なくとも他の移動体の車両情報を含む情報を受信する通信部と、少なくとも前記移動体の車両情報と前記他の移動体の車両情報とに基づいて前記移動体と前記他の移動体とが接触する危険性があるか否かを判定する制御部と、報知部と、を備える移動体通信装置であって、前記制御部は、前記移動体と前記他の移動体とが接触する危険性があるときに前記移動体の運転者情報に基づいて前記報知部を制御して所定の報知を行うこととする。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
風景画像合成装置、風景画像合成方法及び風景画像合成プログラム
【課題】走行途上の視覚的な有益情報を運転手に提供すること。
【解決手段】第1の車10の車載カメラ11aで撮影された第1の風景画像を入力し、第2の車20の車載カメラ21aで撮影された第2の風景画像を無線通信ネットワーク700を介して受信して、第1の風景画像の一領域と第2の風景画像の一領域とを比較して類似度が最も高い領域を特定し、その特定領域でそれら2枚の風景画像を重ね合わせて、重ね合わされた合成風景画像を表示する。
(もっと読む)
可動物予測装置及びプログラム
【課題】適切な精度で、可動物の将来の位置及び移動状態を予測することができると共に、計算量の増大を抑制することができるようにする。
【解決手段】行動変化度算出部44は、検出された可動物の各々について、可動物の種類及び位置に基づいて、可動物の行動変化度を算出する。予測方法選択部46は、可動物の各々について、行動変化度が閾値未満である場合、可動物の種類、位置、及び移動状態に基づいて、可動物単位で、可動物の将来の位置及び移動状態を線形予測し、算出された行動変化度が閾値以上である場合、可動物を表わす複数の可動物粒子の各々について将来の位置及び移動状態を予測することにより、可動物の将来の位置及び移動状態を予測する。
(もっと読む)
ナビゲーションシステム
【課題】自車両の前方を走行する他の車両を追い越す際、自車両及び前方の他車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供する。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
(もっと読む)
追従対象車特定装置
【課題】 追従対象車両と他の車両が近接している場合であっても、追従対象車両を精度よく特定することを可能とした追従対象車特定装置を提供する。
【解決手段】 車々間通信機30で取得した周辺車両情報と、レーダ装置41で取得した前方車両の車両情報とを追従走行ECU10が比較することで、追従対象車両を特定する追従対象車特定装置であって、車々間通信機30で取得した他車両の速度とレーダ装置41で取得した前方車両の速度とを自車両進行方向の速度成分で比較することにより、追従対象車を特定する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】道路形状を考慮してタイヤの溝の残量を予測することができ、その予測残量に応じた案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置10は、地図情報DB12aと、走行経路探索部11aと、車両が道路を走行する場合のタイヤの変化量コストを道路形状毎に格納した変化量コストテーブル12bと、タイヤの溝の現在残量を特定する現在残量特定部11bと、道路形状毎の変化量コストとに基づいて、タイヤの変化量コストを算定する変化量コスト算定部11cと、現在残量と変化量コストとに基づいてタイヤの溝の予測残量を算定する予測残量算定部11dと、予測残量に基づいてタイヤに関する案内を行う案内制御部11eとを備える。
(もっと読む)
ナビゲーション装置
【課題】通信機およびナビゲーション装置の移動を考慮した待ち合わせ地点を提供するナビゲーション装置を得る。
【解決手段】待ち合わせ場所算出部6は、通信機15に位置情報送信要求を周期的に送信し、当該位置情報送信要求に応じて位置情報検出部4で検出された通信機15の位置情報、通信機15の位置情報が検出された時点で自位置情報検出部5が検出した位置情報、および地図情報記憶部8から読み出した地図情報を用いて通信機15との待ち合わせ地点を逐次算出すると共に、算出した待ち合わせ地点について無線インタフェース部2を介して通信機15に許可要求を行い、許可された待ち合わせ地点を自身の走行ルートの経由地または目的地に設定する。
(もっと読む)
モータービークルに対する絶対位置を決定する方法
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
運転アシストシステム
【課題】運転者が違和感を覚えることなく曲がるべきポイントを的確に把握することが可能な運転アシストシステムを提供する。
【解決手段】本発明は、車両のウインドシールド上に所定画像情報を重畳表示することによって、運転者に対する運転アシストを行う運転アシストシステムであって、前記画像情報における案内方向を示す矢印の太さを補正する補正手段を有することを特徴とする。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
車両情報提示装置
【課題】交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して安全性を向上する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
(もっと読む)
41 - 60 / 360
[ Back to top ]