
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
181 - 200 / 463
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム

【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施可否を示す情報を取得し、前記運転支援制御の実施可否を示す情報が示す変速比制御の実施可否に応じて、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させるための制御を行い、前記運転支援制御の実施可否を示す情報が示す制動部による減速制御の実施可否に応じて、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための制御を行う。
(もっと読む)
車載表示装置
【課題】車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させる。
【解決手段】表示パターン生成部は、円弧形状の表示パターンPを生成する。そして表示パターン生成部は、円の真下向きを基準の向きとして横Gが加わる向きと大きさに応じて左右それぞれに0〜90°の範囲内で表示パターンPの傾きを変化させる。このような表示パターンPによれば、表示パターンPの傾きは振り子が遠心力で振れる動きを想起させる表示であるので、運転者は車両に加わる横Gを直感的に理解することができる。
(もっと読む)
ナビゲーション装置
【課題】従来のナビゲーション装置は、経路の高低差に関する情報を、標高のみに着目した表示画面によって提供するので、経路が描画された地図表示画面からは、経路の高低差に関する情報を読み取ることができない。
【解決手段】地図表示画面への推奨経路の描画を、経路の標高ごとに異なる描画色で行う。さらに、勾配の大きさ、勾配の長さおよび路面状態などの情報に基づいて、滑りやすい区間を強調表示する。これにより、経路選択や運転を行う際に、これらの情報を活用することが可能となる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方の道路区間において運転支援制御を実施するか否かを、ユーザが選択することができなかった。
【解決手段】自車両の周辺の道路の特徴を示す特徴情報を取得し、運転支援制御を実施する候補とする道路の特徴を示す候補特徴情報を取得し、前記候補特徴情報に示される特徴と合致する特徴が前記特徴情報に含まれる場合、前記運転支援制御の実施可否を、ユーザに選択させるための案内を行い、前記ユーザの選択を示す情報を取得し、前記ユーザが前記運転支援制御の実施を許可すると選択した場合、前記運転支援制御を行う。
(もっと読む)
速度警報装置
【課題】車両の乗員が煩わしさを感じてしまうことを防止しつつ適切な速度警報をおこなう。
【解決手段】速度警報装置10は、自車位置を検出する現在位置検出部41と、道路種別および道路の最高速度の情報を有する地図データを記憶する地図データ記憶部12と、自車両が異なる道路種別の道路に進入したか否かを判定する進入判定部42と、進入判定部42により自車両が異なる道路種別の道路に進入したと判定された場合に、自車両が進入した道路での積算走行距離を検知する積算走行距離算出部43および自車両が進入した道路での自車両の速度を検知する車速センサ21と、積算走行距離が所定距離以下、かつ、自車両の速度が最高速度よりも速い場合に、少なくとも聴覚的または視覚的な報知を自車両の乗員におこなう出力制御部44および出力部14とを備える。
(もっと読む)
車両用運転支援装置
【課題】渋滞の発生を未然に防止するように車両の運転を支援することが可能となると共に、実用上十分に使い勝手を向上し得る車両用運転支援装置を提供すること。
【解決手段】車両用運転支援装置であって、他車両検知手段の検知結果に基づいて、自車両と同一の走行レーンを走行している、当該自車両の前方及び後方の所定距離内に存在する他車両の車両密度を各々求める車両密度算出手段を備え、走行状態判定手段は、車両密度算出手段の算出結果に基づいた、自車両における後方の車両密度から、前方の車両密度を差し引いた差が、第1の規定値よりも大きく、且つ、自車両検知手段によって検知された当該自車両の走行速度に対応して予め設定された閾値から、後方の車両密度を差し引いた差が、第2の規定値以下である場合、当該自車両の走行状態が渋滞の発生原因になり得ると判定するようにした。
(もっと読む)
道路形状学習装置
【課題】走行中の車両状態に基づいて適切な学習を行うことができる道路形状学習装置を提供する。
【解決手段】カーブの推定形状と認識形状とが同等となるように道路データを修正する修正28を備える道路形状学習装置において、自車両のカーブの通過状態がカーブ形状を推定するのに適した状態か否か判定するとともに、カーブ形状を推定するのに適した状態ではないと判定した場合に、修正部28による道路データの修正を禁止する道路比較部27を備えることを特徴とする。
(もっと読む)
ウィンカー制御支援装置、ウィンカー制御支援方法、及び、ウィンカー制御支援プログラム
【課題】車線変更、路肩発進等による操舵角の小さな変化でもウィンカーの自動的な解除に貢献する。
【解決手段】動作中検出手段11aが車両のウィンカーの動作中を検出すると、針路変更完了判定手段11dが進行方向ベクトル検出手段11bによって検出された車両の進行方向ベクトルと道路情報取得手段11cによって取得された、例えば道路の基準線、基準ベクトル等を示す道路情報とを比較し、その比較結果に基づいて車両の針路変更が完了したか否かを判定する。針路変更完了判定手段11dによって針路変更が完了したと判定されると、解除制御手段11eがウィンカーの動作解除を制御する。
(もっと読む)
運転支援装置
【課題】信号サイクル情報に応じて適切な停止支援を行う運転支援装置を提供することを課題とする。
【解決手段】信号サイクル情報に基づいて停止支援を行う運転支援装置であって、信号サイクル情報において停止信号から進行許可信号に切り替わるまでの時間が確定していない不確定サイクル情報を特定する不確定サイクル情報特定手段と、不確定サイクル情報特定手段で特定した不確定サイクル情報に基づいて停止支援を抑制する支援抑制手段とを備えることを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】駆動源の出力制御が解除されたときに、運転者自身のアクセルペダルの踏み込み量から予測される車両の挙動と実際の車両の挙動とがスムーズに合致しないと感じることがあった。
【解決手段】自車両のアクセルペダルの位置と駆動源の出力の調整量とについて予め設定された対応関係を適用せずに前記調整量が制御されることによって前記自車両が基準車速で走行する基準車速走行区間の終了地点を取得し、前記基準車速走行区間の終了地点を前記自車両が通過後、前記アクセルペダルの位置に前記対応関係を適用した場合に対応する調整量と実際の調整量とが不一致であるとき、第一変化度合いで前記調整量を変化させる。
(もっと読む)
車両用逆走防止装置、車両用逆走防止方法、及び車両用逆走防止プログラム
【課題】車両の進行方向に対して片面のみ反射板を有する視線誘導標が設置された一方通行路において、視線誘導標を利用し精度の高い車両の逆走判定を行うと共に、車両の逆走を防止する車両用逆走防止装置、車両用逆走防止方法、及び車両用逆走防止プログラムを提供する。
【解決手段】本発明は、車両の前方の道路に沿って予め設けられ、前記車両の進行方向に対して片面のみ反射板を有する視線誘導標からの反射光の光量を検出する対象物体検出手段32と、前記対象物体検出手段32によって得られた検出結果を用いて、前記車両が逆走しているか否かを判定する逆走判定手段34と、前記逆走判定手段34によって前記車両が逆走していると判定された場合に、運転者に対して警告を出力する警告制御手段36とを備えることを特徴とする。
(もっと読む)
走行道路特定装置および走行道路特定方法
【課題】微小な角度差で道路が分岐する特定分岐点の通過後における自車位置を正しい走行道路上に直ちに更新することができる「走行道路特定装置および走行道路特定方法」を提供する。
【解決手段】車載カメラによって撮像された撮像画像から走行中の道路である走行道路上の白線を検出する白線検出部210と、白線検出部210によって検出された白線が連続しているか否かを判定する連続判定部220と、特定分岐点における連続判定部220による判定の判定結果に基づいて、特定分岐点の通過後の走行道路を特定する走行道路特定部230とを設け、白線が特定分岐点にて連続しているか否かのみに基づいて特定分岐点の通過後の走行道路を特定するようにしている。
(もっと読む)
車両運転支援システムおよび車両運転支援方法
【課題】理論上不可避とされる地図データ上での自車両位置と実位置との誤差を考慮して、一時停止に関する運転支援のための案内や警報出力を高い精度で行うことができるシステムを提供する。
【解決手段】予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている一時停止が必要な地点に自車両が到達する前から当該地点での一時停止に関する案内または警報を発するものとする。また、一時停止が必要な地点の停止線を自車両が通過したことを検知する車載監視カメラを設けておく。監視カメラの視覚情報から停止線を自車両が通過したと判定したならば、一時停止に関する案内または警報を直ちに停止する。
(もっと読む)
路車間通信装置
【課題】適切な精度の位置情報を提供できる路車間通信装置を提供すること。
【解決手段】車両と通信し車両の運転支援に用いられる位置情報を提供する路車間通信装置1であって、車両に装備される運転支援機能において必要な位置情報の精度を取得し(S10、S12)、その精度に応じた位置情報を車両に送信する(S14、S16)。これにより、過不足ない位置情報を車両に送信できる。このため、位置情報の情報量が無駄に多くなることを防止でき、位置情報以外の有用な他の情報を送信することが可能となる。
(もっと読む)
逆走警告装置、逆走警告方法
【課題】コストの増大を最小限に抑制し、逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供すること。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、道路を含む領域を撮影する撮影手段22と、撮影手段22が撮影した画像データから走行レーンに平行な対象物を認識する画像処理手段23と、画像データにおける対象物の長手方向の向きから、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする逆走警告装置100を提供する。
(もっと読む)
運転補助装置
【課題】より安全な走行を実現することができる運転補助装置を提供すること。
【解決手段】本発明による運転補助装置1は、車両の位置を検出する位置検出手段2aと、道路Rと道路Rに付属する所定領域SAと道路Rから所定領域RAに退出する退出路Aと所定領域SAから道路Rに合流する合流路Bを含む地図情報を記憶する記憶手段6と、地図情報と車両の位置に基づいて車両が所定領域SAに位置するか否かを判定する位置判定手段2eと、車両の方向指示器の左右出力を検出する左右出力検出手段2fと、位置判定手段2eが、車両が所定領域SAに位置すると判定した後、左右出力検出手段2fの左右出力の検出結果に基づいて車両が逆走しているか否かを判定する逆走判定手段2gを備えることを特徴とする。
(もっと読む)
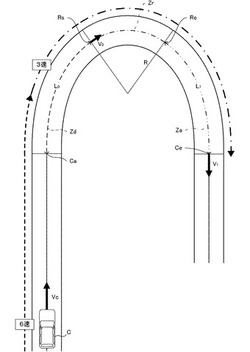
運転評価装置、及び運転評価方法
【課題】交差点で車両を右左折させる際の運転操作を適切に評価する運転評価装置、及び運転評価方法を提供すること。
【解決手段】交差点で車両を右左折させる際の運転操作を評価する運転評価装置10において、車両の走行距離Dの推移とステアリングハンドル又は車輪の操舵角θの推移とを検出し記憶させる検出記憶手段21と、検出記憶手段21により検出し記憶させた走行距離Dの推移と操舵角θの推移とに基づいて交差点への進入地点Qを検出する進入地点検出手段23と、進入地点検出手段23により検出された進入地点Qを考慮して運転操作を評価する運転操作評価手段25と、を備える。
(もっと読む)
車両通信システム
【課題】変更した走行計画に応じた情報を路側装置から提供されない場合であっても、その変更した走行計画に応じた情報を取得することができる車両通信システムを提供すること。
【解決手段】路側装置1と車載装置2との通信により車両の走行計画に応じた情報を提供する車両通信システムであって、路側装置1が、通信エリア内を走行する第一の車両に対しその第一の車両の走行計画に応じた情報を提供し、第一の車両が通信エリア外において走行計画を変更した場合に第二の車両にその変更した走行計画に応じた情報を提供し、その第二の車両が第一の車両に対し変更した走行計画に応じた情報を送信する。これにより、第一の車両が変更した走行計画に応じた情報を路側装置から直接提供されない場合であっても、その変更した走行計画に応じた情報を取得することができる。
(もっと読む)
逆走警告装置、逆走警告方法
【課題】逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置及び逆走警告方法を提供すること。
【解決手段】自車位置を検出する手段24と、自車両の車長方向の車線区分線に対する角度を検出する角度検出手段22と、自車位置が高速道路の本線を走行している場合であって、角度が略90度になった場合、乗員に警告する警告手段32、25と、を有することを特徴とする逆走警告装置100を提供する。
(もっと読む)
181 - 200 / 463
[ Back to top ]