
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
241 - 260 / 463
ナビゲーション装置及びプログラム
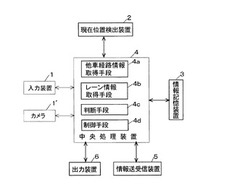
【課題】経路上の推奨レーンへの移動が互いに交差する周辺他車がいる場合にも適切な案内ができるようにする。
【解決手段】走行すべき経路を案内するナビゲーション装置において、周辺他車の経路情報を取得する他車経路情報取得手段(4a)と、取得した周辺他車経路情報及び自車経路情報から自車及び周辺他車の推奨レーン及び走行レーンを取得するレーン情報取得手段(4b)と、取得した自車及び周辺他車の推奨レーン及び現在の走行レーンから、推奨レーンへの移動によって自車と交差する周辺他車がいるか否かを判断する判断手段(4c)と、推奨レーンへの移動が交差する周辺他車がいるとき警告する制御手段(4d)とを備えたものである。
(もっと読む)
走行状況判定装置

【課題】車両搭載したカメラを利用し、道路面に書かれた道路標示の検出とその形状認識から、精度良く走行状況を判定することができる走行状況判定装置を提供すること。
【解決手段】自車が道路交通法や道路規制に反する走行状況であるか否かを判定する走行状況判定装置において、車両に搭載され、周辺道路を含む画像情報を取得するカメラ4と、カメラ4からの画像情報を俯瞰変換する画像処理部12と、予め道路標示の形状を記憶しておくメモリ10と、画像処理部12から得られる俯瞰変換された第1の道路標示と、メモリ10から抽出された第2の道路標示を形状比較する比較部(ステップS502)と、比較部による比較結果から、自車の走行状況を判定する走行状況判定部(ステップS503,ステップS504)と、を備えた。
(もっと読む)
車両周辺監視装置
【課題】カメラのレンズの特性や車体の形状に影響されず、簡易な構成でどのカメラからの画像が表示されているかを分かりやすく示す車両周辺監視装置を提供する。
【解決手段】車両に搭載され、当該車両の周囲を撮影する複数の車両周囲撮影手段と、車両周囲撮影手段が撮影する車両周囲画像を表示する表示器と、表示器に車両周囲画像を表示する要求が発生したか否かを判定する表示要求判定手段と、表示要求が発生したと判定され、表示器に、該表示要求に対応する車両周囲画像を表示する際に、該車両周囲画像を撮影した車両周囲撮影手段の搭載位置を識別可能とするための視覚効果を適用して該表示器に該車両周囲画像を表示する表示制御手段と、を備えることを特徴とする車両周辺監視装置として提供可能である。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】駆動方式がハイブリッド方式の車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段30での拘束条件を満たしている状態で、少なくともハイブリッドシステムにおける電力収支が正の場合の電力収支の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
車載用音響装置、車載用音響装置の制御方法
【課題】運転手に車両の速度の上げ過ぎに気をつけるべきことを気づかせることができ、楽曲再生に起因して車両の速度が上がり過ぎるのを防止することができる車載用音響装置を提供する。
【解決手段】楽曲を再生するナビゲーション装置10において、車両の速度を検出する車速検部13を備え、車速検出部13によって検出された速度と、予め設定された基準速度との比較結果に応じて、楽曲の再生状態を変更する。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段30と、拘束条件演算手段での拘束条件を満たしている状態で、少なくとも速度の分散の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段30とを備えることを特徴とする。
(もっと読む)
車両走行制御装置
【課題】 主要道路を走行中にナビゲーション装置などの自車両が走行環境を取得する手段によって主要道路を退出しようとしたと判断された場合に、運転者に与える違和感を少なくすることができる車両走行制御装置を提供する。
【解決手段】 走行制御ECU1は、目標車速設定部12で設定された車速に基づいて、ACC制御部13によって車速を制御する。加速意思取得部11では、運転者の加速意思を取得している。目標車速設定部12において、車両が高速道路の本線を走行中であるにも係わらず、誤って退出路を走行していると判定することがある。この場合、目標車速を低く設定して加速を抑制するが、このときに加速意思取得部11が運転者の加速意思を取得した場合には、目標車速を低くせず、加速の抑制をキャンセルする。
(もっと読む)
ナビゲーション装置及びプログラム
【課題】車両サイズに比して相対的に幅員が狭い道路へ分岐する場合に、車両の内輪差により車体が道路端へ接触しないように案内する。
【解決手段】目的地や車両サイズを入力する入力手段(1)と、車両の現在位置を検出する現在位置検出手段(2)と、道路データを含む経路案内に必要なデータを記憶した情報記憶手段(3)と、道路データを読み出し、現在位置から目的地までの経路を探索する経路探索手段(4a)と、車線内走行位置を検出する走行位置検出手段(7)と、入力された車両サイズに対して経路中の案内分岐点における分岐先道路が狭いか否か判断する判断手段(4b)と、案内分岐点において案内画面の交差点拡大図上に矢印表示により分岐を案内する制御手段(4c)とを備え、車両サイズに対して分岐先道路が狭いと判断され、車線内走行位置が車線中央から分岐側寄りであることが検出されたとき、交差点拡大図上の矢印表示を分岐側と反対側へ膨らみを持たせて表示する。
(もっと読む)
運転支援システム、運転支援方法及び統計プログラム
【課題】各地点に対する運転支援を、各車両の状態に応じて行うことができる運転支援システム、運転支援方法及び統計プログラムを提供する。
【解決手段】道路上のスリップ地点に対する運転支援を行う運転支援システムにおいて、管理サーバ2は、各車両Cのナビゲーション装置5から、車両Cの走行状態を検出した加速度を含むプローブデータを取得し、プローブデータ記憶部に蓄積する。また、蓄積したプローブデータのうち、同じスリップ地点に対するプローブデータを抽出し、抽出したプローブデータに含まれる加速度と、プローブデータの蓄積数とに基づき、支援を実行するためのスリップ閾値を取得する。ナビゲーション装置5は、スリップ閾値と、スリップ地点に接近した車両Cの加速度とを比較して、スリップ地点に対する支援を該車両Cに対して実行するか否かを判断する。
(もっと読む)
自車位置演算装置、自車位置演算方法、および、自車位置演算プログラム
【課題】測定した自車位置を地図の道路上にマップマッチングするときに、自車が走行している道路を高精度に選択すること。
【解決手段】コンピュータが、道路を示すリンクについて、リンクの長さ方向を示す方位ベクトルを含む地図情報を、記憶手段から取得し、通信手段により自車位置を検出し、検出した自車位置を、取得した地図情報上に対応づけて補正前自車位置とし、自車への操舵操作を検知することで、自車の進行方向における方位ベクトルを演算し、自車周辺の各リンクについて、自車の方位ベクトルと、リンクの方位ベクトルとのベクトル差分が最小となるリンクを、補正先の道路を示すリンクとして選択し、選択されたリンク上の位置を補正後自車位置として決定し、地図情報上に表示する。
(もっと読む)
分岐路内位置演算装置、分岐路内位置演算方法、および、分岐路内位置演算プログラム
【課題】分岐路内の自車位置を高精度で求め、分岐路内の自車の制御に有効な情報を出力すること。
【解決手段】コンピュータが、自車位置を検出し、分岐路情報で示される所定分岐路の付近に検出した自車位置が存在するとき、所定分岐路の分岐開始点を検出し、自車位置が所定分岐路の分岐元となる本線から所定分岐路へと進入したことを検出し、所定分岐路へと進入した自車位置について、分岐開始点からの走行距離に基づいて分岐路内位置を演算し、分岐路内位置から分岐路情報で示される制御点の位置までの残距離を演算し、分岐路内位置および残距離を出力する。
(もっと読む)
車両用ナビゲーション装置
【課題】道路地図データのアップデート作業の手間を軽減することができ、それにより、最新の道路地図データが、より早期のユーザへの提供を促進可能な車両用ナビゲーション装置を提供すること。
【解決手段】車両用ナビゲーション装置20は、車載カメラ4の撮影画像に基づいて認識された道路形状と、記憶している道路地図データによる道路形状が異なると判定したときに、その道路情報が異なる地点及びその地点での撮影画像を含む情報を外部のデータ管理サーバーに送信する。データ管理サーバーには、道路地図データにおける道路形状が、実際の道路形状と相違する地点に関する情報が蓄積される。従って、道路地図データをアップデートする際に、道路地図データを修正する必要がある箇所の情報が得られるので、アップデートの手間を軽減することができる。
(もっと読む)
画像表示システム及び画像表示装置
【課題】車輌が走行している道路又は交差点等の状況に応じて、車輌に搭載したカメラが撮像した画像を車内のディスプレイに自動的に表示することができる画像表示システム及び画像表示装置を提供する。
【解決手段】信号機情報送信装置91からの信号機情報及び道路標識情報送信装置81からの道路標識情報を、車輌に搭載したECU4の無線通信部44にて受信する。ECU4は、車輌の車速が所定速度以下のときに、信号機情報を受信した場合にはカーナビゲーション装置61の画像をディスプレイ3に表示し、信号機情報を受信していない場合にはカメラ2が撮像した車外の画像を表示する。また、ECU4は、道路標識情報を受信した場合には報知画像を表示する。更に、車輌が道路標識から所定範囲内に存在するときに、車輌の車速が所定速度以下の場合にはカメラ2が撮像した車外の画像を表示し、車速が所定速度より速い場合には報知画像を強調表示する。
(もっと読む)
車載ナビゲーション装置及びプログラム
【課題】側方映像に切り替える地点を登録する操作を省くことが可能な車載ナビゲーション装置及びプログラムに関する。
【解決手段】車載ナビゲーション装置1には、車両の前側方を撮像する撮像装置2及びGPS受信用のアンテナ3が接続されている。処理部14は、操作受付部22により切替操作を受け付けた場合、表示部20に表示されている道路地図画面を、撮像装置2から映像入力部21を介して与えられた側方映像に切り替えると共に、アンテナ3を介してGPS受信部11が受信した信号及びジャイロセンサ12からの信号により処理部14が検出した車両の走行位置を切替登録地点としてDRAM19に記憶する。また、処理部14は、車両の走行中に検出した走行位置がDRAM19に記憶されている切替登録地点から所定範囲内にある場合に、表示部20に表示されている道路地図画面を側方映像に切り替える。
(もっと読む)
道路情報取得装置、運転支援装置、道路情報取得方法および道路情報取得プログラム
【課題】段差が存在せず、車両の安定化制御を実施する必要がない場所であっても安定化制御を実施してしまうことがあった。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両が道路から退出することを判定し、前記自車両が道路から退出すると判定されたときに、前記自車両が段差を通過したか否かを検出する検出部の検出結果を参照して段差を示す情報を取得し、前記退出路に前記段差が存在するときに、前記自車両の現在位置を示す情報に基づいて前記段差の位置を記憶媒体に記録する。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】カーブ通過中の急激な加減速を防止してスムーズにカーブを通過できる新規な車両用走行制御装置および車両用走行制御方法を提供。
【解決手段】カーナビゲーションシステム20からのナビゲーション情報に基づいて算出された目標減速度と、ヨーレートセンサ22のヨーレートから目標減速度を算出された目標減速度とを比較して低い方の目標減速度を選択(セレクトロー)して選択した目標減速度に基づいて減速制御手段を制御すると共に、ヨーレート目標減速度の方が選択された場合には、その最小値を「0」とする。これによって、ナビゲーション情報に基づく減速制御が作動した後に、ヨーレートによる減速制御が作動した場合であっても急激な加減速の変化を防止できるため、スムーズにカーブを通過することができる。
(もっと読む)
走行支援装置、走行支援方法及び走行支援プログラム
【課題】カーブ走行時にシフト制御を行うとともに、変速ショックを緩和することができる走行支援装置、走行支援方法及び走行支援プログラムを提供する。
【解決手段】車両Cの自動変速装置と制動装置とを制御して、車両前方のカーブに対して支援を行うナビゲーションユニット20において、メインCPUは、車両の進行方向前方の道路に関する道路情報を取得して、前記道路情報に基づき支援対象となるカーブがあるか否かを判断し、車両の進行方向前方に支援対象のカーブが検出された際に、該カーブの走行に適した推奨変速段を算出し、車両情報に基づき、その時点の変速段から前記推奨変速段に変更した際に生じるトルク変化量を推定し、該トルク変化量に基づいて、ブレーキECU12を制御して制動力を付加するとともに、自動変速装置を制御して前記推奨変速段に変更する。
(もっと読む)
運転支援装置
【課題】
不要な運転支援動作を低減して適切な運転支援が行える運転支援装置を提供すること。
【解決手段】
交差点において車両の停止について運転支援を行う運転支援装置であって、信号機30に矢灯器31が設置されている交差点に車両が差し掛かる際に、矢灯器31の点灯により車両の進路によって信号停止を促す運転支援の必要性が異なる場合に、運転支援動作の開始タイミングを遅らせて運転支援を実行する。これにより、不要な運転支援動作が行われることを抑制することができる。
(もっと読む)
速度監視装置、その制御方法及び制御プログラム
【課題】ナビゲーション装置が逐次監視している車速の変化について、道路の勾配すなわち傾斜角との関係において安全のための判定値をもとに監視及び運転者に警告すると共に、その判定値を運転者白身で変更可能とすることにより、定速走行による安全運転を効果的に支援する。
【解決手段】勾配算出手段21は、加速度センサ1により逐次検出される加速度を用いて走行中の道路の勾配を算出する。車速算出手段22は、車速を算出する。上記のように算出される勾配と車速とに関し、判定値設定手段23は、車速の監視及び警告に用いる安全のための判定値を設定し、このように設定する判定値について、設定変更手段24が変更を受け付ける。この判定値は、勾配及び速度変動の各基準値を含み、これら各基準値をもとに、所定以上の勾配において、所定以上の速度変動を判定及び報知する手段が、勾配判定手段25及び車速判定手段26である。
(もっと読む)
車線認識装置及びナビゲーション装置
【課題】車両が走行している車線の特定の確実性を向上させた「車線認識装置」、及び、当該車線認識装置により認識された車線に応じた処理を行う「ナビゲーション装置」を提供する。
【解決手段】車線認識装置100は、特徴抽出部12が、車両周辺の撮影によって得られる画像データから俯瞰画像を生成し、当該俯瞰画像における道路上の特徴部位を抽出する。不要特徴削除部18は、特徴部位のうち、白線以外に対応する道路上の特徴部位を削除し、白線認識部20が、残った白線に対応する道路上の特徴部位に基づいて白線の絶対位置を認識し、更に、車線特定部22が、車両が走行している車線を特定する。
(もっと読む)
241 - 260 / 463
[ Back to top ]