
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
261 - 280 / 463
車両制御装置、車両制御方法及びコンピュータプログラム
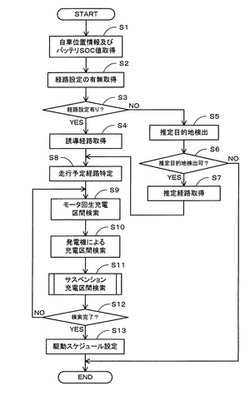
【課題】モータを駆動源とする電動車両において、サスペンションによる発電によりバッテリの充電を行うことも考慮して、燃料消費量が最少となるように、モータの制御スケジュールを設定することを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】駆動源として駆動モータ5を備え、電磁サスペンション13A〜13Dの変位により発電した電力でバッテリ7の充電を行うことが可能な電動車両に対し、車両が今後に走行を予定する走行予定経路内にある充電区間について、各充電区間でのバッテリ7の充電量を推定し(S9〜S11)、推定された充電量を用いて目的地までの燃料消費量が最少となるように、走行予定経路を車両が走行する際のエンジン4と駆動モータ5の駆動スケジュールを設定する(S13)ように構成する。
(もっと読む)
車両用照明装置

【課題】車両走行中に適切な照射角度や照射範囲が適切となる車両用照明装置を提供する。
【解決手段】照明50消灯時に、走行中の車両の車両速度、車両位置及び前方道路状況を取得するとともに、カメラ30で取得した運転者の顔画像から運転者の視線を画像処理によって取得する。取得した車両速度、車両位置及び前方道路状況と運転者の視線を外部記憶装置60に蓄積し、車両速度、車両位置及び前方道路状況と運転者の視線の関係を学習し学習結果として蓄積する。そして、夜間など照明50点灯時には、GPS車載器20と地図データベース10とから車両前方の道路の曲率を取得し、外部記憶装置60に蓄積された学習結果の車両速度、車両位置と視線との関係に基づいて、車両走行中の照明50の照射角度を車両前方の道路の曲率に適した角度になるように制御する。
(もっと読む)
情報報知装置、情報報知方法及びプログラム
【課題】案内交差点の進行方向を運転者に違和感を感じさせないで的確に報知することが可能となる情報報知装置、情報報知方法及びプログラムを提供する。
【解決手段】案内交差点の進行方向を案内する交差点案内区間内に、この案内交差点の進行方向に対して逆方向に進む逆カーブがある場合には、CPU41は、自車位置が逆カーブのコーナ区間を通過して退出クロソイド区間に進入し、且つ、ハンドル3が案内交差点の進行方向と同じ方向に切られるのを待つ。そして、自車位置が逆カーブのコーナ区間を通過して退出クロソイド区間に進入し、且つ、ハンドル3が案内交差点の進行方向と同じ方向に切られた場合には、CPU41は、案内交差点の進行方向に対応する右側振動体53又は左側振動体54の振動を開始して、該案内交差点の進行方向を運転者に報知する(S11〜S19)。
(もっと読む)
車両制御装置
【課題】制動制御後において車両が経路方向とは異なる方向へ発進するおそれを低減することが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、車両を停止させる制動制御を行った後、所定のタイミングで制動制御を解除する制動制御部11を備えている。さらにこの車両制御装置1は、制動制御後に、車両が走行する経路方向を取得する経路方向取得部12と、その制動制御を解除した後の車両の進行方向を推定する進行方向推定部13と、を備え、制動制御部11は、経路方向と進行方向との偏差が所定値よりも大きい場合にその制動制御を保持する。
(もっと読む)
カーナビゲーション装置、道路標識認識方法およびプログラム
【課題】道路標識を認識するまでの時間を短縮する。
【解決手段】処理部20において、道路状況判定部21は、車両2が走行中の道路の道路状況を判定する。このとき、認識順序情報12には、道路状況ごとにその道路状況に応じて存在する可能性の高い道路標識を優先して認識するような認識順序が記憶されている。そこで、認識順序決定部22は、認識順序情報12を参照して、前記判定した道路状況に応じて適切な道路標識の認識順序を決定し、画像認識処理部23は、その決定された認識順序に従って道路標識を認識する。従って、画像認識処理部23は、車両2が走行中の道路の道路状況に応じて存在する可能性の高い道路標識を優先して認識する。従って、道路標識の認識に到るまでの時間が短縮される。また、警告出力部28は、走行状況判定部24により判定された車両2の走行状況に応じて必要な場合に道路標識の警告を出力する。
(もっと読む)
走行制御関連データ記憶装置および走行制御関連データ収集装置
【課題】記憶しておくデータ量を少なくしつつ、データの特徴の損失を抑制することができる走行制御関連データ収集装置を提供する。
【解決手段】サンプリング距離α(=1m)を走行する毎に走行制御関連データを取得する(S20)。この走行制御関連データをそのまま保存するのではなく、1つの道路区間(1セグメント)を単位として、そのセグメントを走行中に取得した走行制御関連データを用いて近似式を算出する(S40)。そして、S20で取得したデータに代えて、近似式を保存する(S70)。走行制御関連データを出力する際には、保存した近似式からデータを再現して出力する。
(もっと読む)
ナビ協調走行制御システム、ナビ協調走行制御方法、および、ナビゲーション装置
【課題】誤った走行制御の実施を回避する。
【解決手段】道路属性情報取得部13は、地図情報17から走行中の車両前方の道路に付された道路属性情報(一時停止線、カーブ、速度制限区間など)を取得し、協調制御情報出力部14は、その道路属性情報に応じた協調制御情報を出力し、協調走行制御装置21に対し、所定の協調走行制御を指示する。また、制御中断・再開指示部15は、協調走行制御が不可となる可能性がある道路属性情報(三差路など)が取得されたときには、協調走行制御の可・不可を判定し、不可であったときには、協調走行制御装置21に対して制御の中断を指示し、警報装置222によりその旨をドライバに通知する。また、制御再開が可能になったときには、協調走行制御装置21に対し制御の再開を指示し、警報装置222によりその旨をドライバに通知する。
(もっと読む)
運転支援装置
【課題】車両が検出した路面標示に対して制御対象物が複数関連付けられた場合であっても、不要な案内や誤制御が行われることなく、正確な制御対象物に対する運転の補助を行うことを可能とした運転支援装置を提供する。
【解決手段】車両2から所定範囲内に路面標示が存在すると判定された場合に、後方カメラ3によって撮像された画像から路面標示を検出し、検出された路面標示に関連付けられた制御対象物が単数である場合、又は前記関連付けられた制御対象物が複数であって且つそれぞれの物間距離の差が制御実施可否距離以上である場合に、車両から案内及び車両制御の対象となる制御対象物までの対象距離を算出し、算出された対象距離に基づいて、制御対象物に応じた案内及び車両制御を行うように構成する。
(もっと読む)
運転支援装置
【課題】重複した運転支援を抑制して適切な運転支援が行える運転支援装置を提供すること。
【解決手段】信号機に基づく第一運転支援と他の移動体に基づく第二運転支援を行う運転支援装置であって、第一運転支援により信号機が赤表示となることから信号停止位置での停止を促す運転支援を行う場合に、他の車両、歩行者、自転車の状況による第二運転支援を行わないようする(S22、S24)。これにより、複数ある運転支援処理のうち不要な運転支援を行わないようにして、適切な運転支援が可能となる。
(もっと読む)
車両の走行支援装置
【課題】他車両の走行状態に基づいて路面状態を推定し、自車両の減速制御に反映させる。
【解決手段】車両に搭載され基地局20または他車両Voとの間で通信可能な双方向無線機5と、双方向無線機5により取得された情報に基づき車両の走行支援を行う演算部6と、を備えた車両の走行支援装置1において、道路情報を記憶する道路情報記憶部4と、道路情報記憶部4に記憶された道路上の車両位置を検出するGPS受信器2と、車両の走行状態を検出する走行状態検出部3と、を備え、双方向無線機5は基地局20または他車両Voとの間で車両位置情報および走行状態情報を送受信し、演算部6は双方向無線機5により取得された他車両の走行状態に基づいて該他車両の車両位置における路面状態を推定するとともに、推定された路面状態に基づいて自車両Vmの減速制御または乗員に対する警告を行う。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】道路上の特定の位置における頻度の高い車両の挙動を、高い位置精度を伴って学習することが可能な車両挙動学習装置を提供する。
【解決手段】自車位置情報Lと、自車両の周辺の画像情報Gと、自車両の周辺の地物情報Fとを取得し、画像情報Gに含まれる対象地物の認識処理が行われる。挙動検出手段7は、画像認識に成功した位置から所定範囲内の自車両の挙動を検出する。検出結果を表す挙動検出情報Bは、検出位置の情報と関連づけて検出結果記憶手段8に記憶される。学習挙動抽出手段29は、自車両が同じ場所を複数回通行することにより検出結果記憶手段8に記憶された、同じ自車両の挙動についての複数の挙動検出情報Bに基づいて、繰り返し検出される自車両の挙動を学習挙動として抽出し、学習挙動の属性情報及び位置情報を対応する対象地物の地物情報Fと関連づけた学習挙動情報Rとして出力する。
(もっと読む)
車両用分岐路選択装置および車両用分岐路選択方法
【課題】車両前方に存在する分岐路の中から、自車両が進むと考えられる適切な進路を選択する。
【解決手段】自車両61の位置および地図データに基づいて、自車両前方に存在する分岐路60A,60Bを検出するとともに、検出した分岐路の情報を取得する。また、自車両61の前方に存在する先行車両62を検出するとともに、検出した先行車両62の走行状態を検出する。そして、各分岐路の情報と、先行車両の走行状態とに基づいて、分岐路60A,60Bの中から、自車両が進むと考えられる進路を選択する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】ドライバーがミラー越しに車両周辺を見た際にピラーによって死角が生じる場合でも、死角領域の画像をピラーに表示することができる運転支援方法及び運転支援装置を提供する。
【解決手段】自車両に取り付けられた死角撮影カメラ4を用いて、自車両のピラーによって生じる死角エリアを撮影し、該死角エリアに相当する画像をピラーの内側に表示する運転支援方法において、ドライバーの頭部位置を検出するとともに、車室内に設けられたルームミラーの角度を取得し、ドライバーの頭部位置及びルームミラーの角度に基づき、ドライバーがルームミラーを介して車両周辺を視認した際に、ルームミラーに映ったピラーによって生じる死角エリアを算出し、死角撮影カメラ4が撮影した画像データのうち、死角エリアに相当する領域をピラーに投影する。
(もっと読む)
交通情報表示装置
【課題】道路利用者や道路管理者が予め走行上の問題点や注意点を把握して、交通事故などを抑制できる交通情報表示装置を提供する。
【解決手段】 道路地図に係る地図情報7、道路地図の道路に沿って走行した走行車両の挙動情報9および走行車両の走行に従った車外画像情報8を読み出す読み出し部15と、挙動情報9と挙動情報9に含まれる座標情報に連動する地図画像および挙動情報9に含まれる時刻情報に連動する車外画像の少なくとも一つを同一画面に表示する表示画像13を生成する表示制御部3と、ユーザーからの情報を受け付けてユーザー情報11を分析する受付部4と、地図情報7、挙動情報9、車外画像情報8およびユーザー情報11の少なくとも2つを関連付けて、ユーザーに対する警告情報12を生成する生成部5と、表示画像13に、警告情報12を付加して表示する表示部6を備える交通情報表示装置1である。
(もっと読む)
車両用制御装置
【課題】前方の車両に接近した場合であっても違和感のない走行をおこなうことができる制御装置を提供することを目的とする。
【解決手段】走行中の自車両と前方の車両との車間距離に基づいて自車両のいずれかの動作機構を制御する車両用制御装置において、自車両の前方の車両に対する接近状態を検出する接近状態検出手段(ステップ11)と、交通渋滞の発生状態を検出する渋滞検出手段(ステップ12)と、自車両が前方の車両に接近していることを前記接近状態検出手段が検出し、かつ自車両が交通渋滞区間の中にあることもしくは自車両が交通渋滞区間に入ることを前記渋滞検出手段が検出したことに基づいて前記動作機構の制御内容を変更する渋滞制御実行手段(ステップ14)とを備えている。
(もっと読む)
車両ガイドシステム
【課題】個々の車両がネットワーク内で自由に走行できるようにすること
【解決手段】所定の経路に沿って車両(10)を管理するための車両ガイドシステムは、車載コンピュータ(26)と、多数の距離センサ(18、20、22、24)と、コンピュータによって制御可能なステアリングシステム(16)とを備える。コンピュータ(26)のメモリ(28)内には所定の経路が記憶されており、作動時に所定の経路に従うようにステアリングシステムが制御される。センサ(18、20、22、24)は、所定の経路に沿って設けられた縁部(30、32)とセンサとの間の、車両の走行方向Aに対する横方向の距離を測定するようになっており、コンピュータ(27)は、センサが検出した所定の経路からの横方向の偏差を補正するように、ステアリングシステム(16)を制御するようになっている。
(もっと読む)
車載用ナビゲーション装置
【課題】前方にカーブがある場合に、運転者が現在の走行速度が危険であるか否かを容易に感知することを可能とする車載用ナビゲーション装置を提供する。
【解決手段】自車位置検出装置により求めた現在地から入力装置により入力された地図上の目的地に至る経路探索を行い、表示装置に探索された誘導経路に自車位置マークを重ねて表示する車載用ナビゲーション装置において、自車位置から進行方向前方の所定距離以内に所定曲率半径以下の曲率半径のカーブがあり、走行速度が所定速度以上である場合には、現在の進行速度で前記カーブを通行するときに車両に加わる横滑り方向の摩擦力が発生しない道路の傾斜角度を表示装置に表示する。
(もっと読む)
走行レーン判定装置
【課題】走行環境やドライバ意図、道路形状に影響されることなく精度良く車両の走行レーンを判定する。
【解決手段】情報処理部1は、車速が設定車速以上で、且つ、道路地図情報より複数の走行レーンが存在する道路上を走行している車車間通信が確立されている他車両の中から判定対象とする車両を選択し、判定対象が旋回走行状態の場合は、運転状態を基に判定対象の旋回半径を演算し、該旋回半径と予め設定しておいた閾値とを比較して走行レーンを判定する一方、判定対象が直進走行状態の場合は、過去に走行レーンを走行した車両位置の分布を基に判定対象の位置座標を座標変換し、該座標変換した位置座標の値と予め設定しておいた閾値とを比較して走行レーンを判定する。
(もっと読む)
位置特定装置、位置特定方法および位置特定プログラム
【課題】車両位置を高精度に算出することを目的とする。
【解決手段】擬似距離測位部210は擬似距離測位により測位位置Aを得る。白線データ取得部221は測位位置Aの周辺に位置する各白線の三次元座標データを取得する。白線データ撮像面投影部222は各白線データをカメラ撮像面に投影する。映像白線抽出部223はカメラ映像から白線を抽出する。特徴量投影部224は各撮像面白線データと映像白線データとの特徴量を算出し、特徴量相関係数算出部225は各撮像面白線データを映像白線データと比較し、相関係数判定部226は映像白線データに対応する撮像面白線データを特定する。車両位置算出部227は、カメラ映像における当該白線の二次元位置に当該白線データが示す三次元座標を当てはめ、焦点距離や画角や設置角などのカメラの特性に基づいて、車両位置を算出する。
(もっと読む)
車両運転警告装置
【課題】車両が旋回運動を終了した後に、運転者の車両操作に対する警告を行う車両運転警告装置を提供する。
【解決手段】車両2において各種センサで検出された車両状況とナビゲーション装置10から取得したナビゲーション情報に基づいて車両2の旋回運動が終了したか否かを判定し(S13)、車両2の旋回運動が終了したと判定された場合(S13:YES)には、運転者の車両操作のタイミングが適切であるか否かを判定する際の基準となる地点として旋回開始点Sを検出し(S14)、検出した旋回開始点Sを基準として、旋回運動に対する運転者の車両操作が適切であったか否かを判定し(S16)、判定結果に基づいて運転者に対して警告を行う(S17)ように構成する。
(もっと読む)
261 - 280 / 463
[ Back to top ]