
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
341 - 360 / 463
合流支援装置
【課題】合流結果の状況を高い精度で予測して的確な情報を自車両の運転者に提示し、合流の際の運転者による運転操作を適切に支援することができるようにする。
【解決手段】コントローラ1が、自車両の合流挙動特性を学習し、その学習値に基づいて自車両運転者が直ちに運転行動を実行した場合の結果状況を予測して、その危険度を算出する。そして、情報提示装置9が、コントローラ1により算出された合流結果の危険度を表す情報を自車両運転者に提示する。
(もっと読む)
車両速度制御システム

【課題】途中で曲率が変化するカーブにおいても、適切に車両の速度を制御する。
【解決手段】曲率が変化するカーブをナビゲーション装置2により自車両の進行方向に検出し、制御点設定部10によりそのカーブ上に複数の制御点を設定する。こうして設定された制御点ごとに、曲率算出部11により曲率値を求めると共に、自車両の目標横加速度を目標横加速度設定部12により設定する。この曲率値と目標横加速度に基づいて、当該カーブを走行する際の自車両の目標速度を目標速度算出部13により算出し、算出された目標速度に基づいて、車両制御部16により自車両の速度を制御する。
(もっと読む)
車線別情報提供装置
【課題】例えば交差点で、行き先の異なる車線別の車両に対して異なる情報を提供しようとするとき、交差点に進入してくる側に車線検出手段を新たに設けなければならない。
既存の車線検出手段として光ビーコンがあるが、交差点の出側に設置されているのが普通であり、そのまま利用することは出来ない。
【解決手段】例えば隣の交差点の出側に設置されている車両の走行車線を特定する車線位置検出装置と、車線を検出した地点から、その後、この交差点に至る間の車線変更を検出する車線変更検出装置とにより、交差点における車両の車線を知る。この車線情報に基づいて交差点に設けたDSRCから情報を提供する。交差点進入部に新たに光ビーコンを設置しなくても、上流にある既存の光ビーコンと交差点に設置されたDSRC無線機器を使い、車線別に情報を提供することが出来る。
(もっと読む)
交差点状況検出装置及び交差点状況検出方法
【課題】交差点の状況を精度よく判定する。
【解決手段】車両1の位置を検出する自車位置検出部3と、車両1の速度を検出する車速検出部4と、少なくとも交差点の位置情報を含む道路情報を格納する道路情報データベース5と、自車位置検出部3により検出された車両1の位置情報と、車速検出部4により検出された車両1の速度情報と、道路情報データベース5に格納されている交差点の位置情報とに基づいて交差点における車両1の停止位置を検出する停止位置検出部6と、停止位置検出部6により検出された車両1の停止位置を記録する走行情報記録部7とを備える。そして、交差点状況判定部8が、走行情報記録部7に記録されている車両1の停止位置に基づいて交差点の状況を判定する。
(もっと読む)
操舵角センサの異常判定装置
【課題】車両速度が遅い場合であれ、操舵角センサの異常の有無を高い精度で判定することができる操舵角センサの異常判定装置を提供する。
【解決手段】操舵角センサ21の異常の有無を判定する異常判定装置として、ナビゲーションシステム22の地理情報及び位置情報を参照しつつ車両がカーブ路走行中にあるカーブ路走行期間を検出するプログラムと、そのカーブ路走行期間内のセンサ出力の最大値を検出するプログラムと、その最大値について所定の閾値との対比を行うことにより該最大値が相当量に足りるかあるいは満たないかを判断するプログラムと、その判断により最大値が相当量に満たないと判断された場合に操舵角センサ21が異常である旨の判定をするプログラムと、を備える構成とする。
(もっと読む)
運転支援方法及び運転支援装置
【課題】積雪状況に応じて、運転支援画像を表示する運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援システム1の制御装置2は、経路データ17及び地図描画データ18を記憶した地理データ記憶部16と、積雪データWを取得し、車両が交差点に接近した際に、積雪データWに基づき、運転者の視界状況を判断するとともに、積雪により良好な視界状況でないと判断した際に、カメラ3を制御して、進行方向の車両の周辺を撮像した映像信号を入力するCPU10と、入力した映像信号に基づく画像をディスプレイ5に出力する画像プロセッサ20とを備えた。
(もっと読む)
位置及び曲率−進行方向に関する2元道路形状表現
【課題】データとして道路を表現する方法を提供する。
【解決手段】カーブ警告システム或いは車線逸脱システムといった、道路曲率に関する運転者支援機能を実現する車両システムは、道路形状を示すデータ及び道路位置を示すデータを使用する。これらの車両システムをサポートするために、2元データ表現は、道路位置、例えば、道路センターライン或いは車線センターラインを示し、他の道路の幾何形状データ表現は、道路形状、例えば、曲率/進行方向を示す。いくつかの異なる2元形状表現を実現することができ、既存及び将来のデータベース表現と共存することができる。
(もっと読む)
車両用ナビゲーション装置
【課題】誘導経路に沿った経路案内動作時において、交差点での右左折が困難になった状況に的確に対応可能にすること。
【解決手段】制御装置2は、地図データ入力器4から取得した地図データなどを用いて出発地から目的地までの誘導経路を探索し、探索した誘導経路に沿った経路案内動作を行う。また、制御装置2は、経路案内動作時には、前方カメラ18により撮影した画像の解析結果に基づいて、自車両前方の交差点内に静止状態で存在する他車両を検知すると共に、その車両の交差点内へのはみ出し量を把握し、当該はみ出し量、自車両のサイズ、交差点に交差する道路の幅員及び交差角に基づいて交差点での左折が困難であるか否かを判定し、困難であると判定したときに、交差点での左折を避けた誘導経路を再探索して新たな誘導経路とすると共に、誘導経路が変更された旨の音声報知をスピーカ8aにより行う。
(もっと読む)
車載ナビゲーション装置
【課題】ハンズフリー通話中での安全運転を適切に確保する。
【解決手段】運転手がハンズフリー通話を開始すると、オフ状態の運転支援機能をオン状態に切替えるので、運転支援機能が動作することにより、運転手に十分な注意を喚起することができ、ハンズフリー通話中での安全運転を適切に確保することができる。また、オートクルーズ機能よりも普及度が高いナビゲーション機能を利用して実現することができるので、実現性をも高めることができる。
(もっと読む)
自車位置測定装置
【課題】本発明は、自車位置測定装置に係り、自車位置の精度をある程度高精度に維持しつつ地物認識の処理負担を軽減することにある。
【解決手段】地図データベースに情報が格納される道路上の地物のうち自車両が今後走行するエリアにおける特徴的な地物、例えば、支援制御の目標対象物に応じた複数の道路種類ごとの出現可能性の高い地物の配置パターンを参照して出現頻度の高い地物を、自車位置補正のために必要な認識すべき地物として設定する(ステップ150)。そして、その設定された地物を認識し、その認識結果に基づいて自車位置をGPS及び走行軌跡に基づくものから補正する。
(もっと読む)
交通違反再発防止システム
【課題】交通事故や違反の再発を防止できる交通違反再発防止システムを提供する。
【解決手段】事故情報および違反情報を含む免許証情報が記録された運転免許証2とナビゲーション装置1とを備えた交通違反再発防止システムであって、ナビゲーション装置は、地図情報を記憶する情報記憶部19と、運転免許証に記録されている事故情報および違反情報を含む免許証情報を読み取る読取部17、18と、読取部で読み取られた免許証情報に含まれる事故情報または違反情報によって示される事故または違反の発生地点を情報記憶部に記憶されている地図情報に反映する情報解析部20と、情報記憶部に記憶されている地図情報に基づき案内を行い、案内する地点が情報記憶部に記憶されている地図情報によって示される事故または違反の発生地点に至った場合に注意喚起メッセージを出力するシステム制御部21とを備えている。
(もっと読む)
対象物認識装置
【課題】本発明は、対象物認識装置に係り、道路上の対象物の認識に要する処理負荷を軽減することにある。
【解決手段】GPSや車速,舵角等による走行軌跡に基づいて自車両の位置を測位すると共に、カメラ撮像画像を用いた対象物の認識結果に基づいて自車両の位置を測位する。また、主に車両の移動距離が長くなるほど低下する自車両の位置を測位するうえでの測位精度を算出する。予め地図データベースに自車両の認識すべき道路上の対象物の位置データを格納する。そして、測位される自車両の位置、地図データベースに格納されている認識すべき対象物の位置、及び算出される自車位置の測位精度に基づいて、対象物を認識すべき道路の認識範囲を設定する。この設定された認識範囲においてカメラ撮像画像を処理して対象物を認識する。
(もっと読む)
車両位置検出装置
【課題】演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出すること。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
(もっと読む)
移動体用運転支援装置
【課題】安全運転の自覚に関する対話を運転者と行うことにより、安全運転を遂行させる運転支援装置を提供する。
【解決手段】運転支援装置101は、移動体の走行状況に関する情報と運転操作に関する情報との少なくとも一方を含む運転状態情報を、車載センサ103から取得する運転状態検出部105と、安全運転に関する運転者の自覚度を数値化して表した自覚度情報を記憶する運転者情報記憶部107と、前記運転状態情報と前記自覚度情報とが所定の対話開始条件を満たす場合に、安全運転に関する運転者の自覚度を確認する質問を生成して合成音声によって出力し、前記質問に対する運転者の回答音声から回答内容を認識する対話制御部106と、対話制御部106により認識された回答内容に応じて前記自覚度情報を更新する自覚度情報作成部107とを備える。
(もっと読む)
車両用測位情報更新装置
【課題】本発明は、車両用測位情報更新装置に係り、実行する支援制御の特徴やレベルに合わせて道路地図データや自車両位置などの測位情報を適切に更新することで、その支援制御を適切に実行させることにある。
【解決手段】自車両の位置に応じて実行される支援制御を適切に実行するうえで要求される自車両位置の測位精度に基づいて、自車両の位置を補正するマップマッチングの実行条件を設定する(ステップ122)。具体的には、要求される測位精度が高くその誤差が小さいほどマップマッチングの実行頻度が多くなるように設定する。そして、その設定された実行条件に従ってマップマッチングを行う(ステップ124)。
(もっと読む)
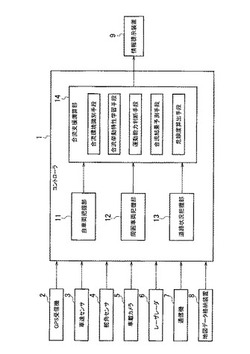
ナビゲーション装置
【課題】急加減速操作が行われたことを検出して報知する運転支援機能を備え、急加減速操作が行われたことを適切なタイミングで報知できるようにしたナビゲーション装置を提供する。
【解決手段】ナビゲーション装置10は、経路探索部112と、車両の走行状況を検出するセンサ部15と、現在位置を測位するGPS受信部12と、地図記憶部13と、出力手段14,19と、加速度判定部111と、急加減速情報記録部18と、報知出力制御部113と、を備えている。加速度判定部111は、センサ部15またはGPS受信部12の出力に基づいて算出した加速度と所定の閾値を比較して急加減速操作が行われたことを検出し、急加減速情報を前記急加減速情報記録部18に記録し、報知出力制御部113は、GPS受信部12が測位した現在位置の情報および現在位置に基づいて地図記憶部13から得た地図情報に基づいて車両が所定の条件下で移動している場合、急加減速情報の報知出力を抑制する。
(もっと読む)
支援制御装置
【課題】本発明は、支援制御装置に係り、対象物位置に応じて実行される支援制御を、位置測位の誤差精度に対応して適切に実行させることにある。
【解決手段】マップマッチングの実行履歴の情報及び地図データベースの更新履歴の情報に基づいて、自車両の位置を測位するうえでの精度誤差を算出すると共に、その算出した精度誤差に基づいて、所定のマップを参照して、測位を行ううえでの精度誤差レベルを複数の段階的なものから特定する。そして、自車両の位置に応じて実行される支援制御の制御レベルを、その特定した精度誤差レベルに応じて変更させる。
(もっと読む)
ナビゲーション装置
【課題】有効な省エネルギー運転支援機能を提供することができるナビゲーション装置を提供する。
【解決手段】指定された出発地から目的地までの経路を探索する経路探索部112と、車両の走行状況を検出するセンサ部15と、現在位置を測位するGPS受信部12と地図情報を記憶した地図記憶部13と、出力手段と、を備えたナビゲーション装置10において、ナビゲーション装置10は、更に、加速度判定部111と、急加減速情報記録部18と、を備え、前記加速度判定部111は、前記センサ部15またはGPS受信部12の出力に基づいて加速度が所定の閾値を超えたことを判定するとともに、前記GPS受信部12が測位した現在位置の情報および現在位置に基づいて地図記憶部13から得た地図情報に基づいて前記急加減速の操作の適否を判定し、不適切な急加減速状態にあることを示す急加減速情報を前記急加減速情報記録部18に記録する。
(もっと読む)
道路情報検出装置及びプログラム
【課題】実際の道路における車両の位置を精度よく判断する。
【解決手段】車両の走行中、自車位置情報(現在位置及び絶対方位)、相対方位及び走行距離を定期的に算出し、相対方位及び走行距離を走行軌跡データとして記憶する。そして、走行軌跡データと地図データとに基づきマップマッチング処理を行い、車両の現在位置を補正するとともに地図データから道路識別子を取得する。さらに、地図データから前方道路情報を取得し、車両の前方にカーブが存在していると判定した場合には、カーブの開始位置付近に存在する反射板までの距離を計測してライト制御部へ出力する。
(もっと読む)
車両制御装置
【課題】実際の天候に応じてスリップや横滑りあるいは車輪回転ロックの発生を予防できるようにする。
【解決手段】制御装置5は、車両のスリップなどの異常挙動が検出されて対応制御動作を行なうと、その時点での車両制御状況を補正データとして取得し、さらに、道路状況データ及び天候情報を取得し、当該動作時点での走行地点を走行注意地点として外部メモリ11に記憶する。そして、走行注意地点での前記補正データに基づき当該走行注意地点での最適な車両制御モードを道路状況及び天候情報に応じて割出し、車両が前記走行注意地点に進入するときもしくは進入が予測されるときに、現時点での前記天候情報に応じた前記車両制御モードを設定し、適宜、実際の天候に合った車両走行状態制御を行なう。
(もっと読む)
341 - 360 / 463
[ Back to top ]