
道路情報検出装置及びプログラム
【課題】実際の道路における車両の位置を精度よく判断する。
【解決手段】車両の走行中、自車位置情報(現在位置及び絶対方位)、相対方位及び走行距離を定期的に算出し、相対方位及び走行距離を走行軌跡データとして記憶する。そして、走行軌跡データと地図データとに基づきマップマッチング処理を行い、車両の現在位置を補正するとともに地図データから道路識別子を取得する。さらに、地図データから前方道路情報を取得し、車両の前方にカーブが存在していると判定した場合には、カーブの開始位置付近に存在する反射板までの距離を計測してライト制御部へ出力する。
【解決手段】車両の走行中、自車位置情報(現在位置及び絶対方位)、相対方位及び走行距離を定期的に算出し、相対方位及び走行距離を走行軌跡データとして記憶する。そして、走行軌跡データと地図データとに基づきマップマッチング処理を行い、車両の現在位置を補正するとともに地図データから道路識別子を取得する。さらに、地図データから前方道路情報を取得し、車両の前方にカーブが存在していると判定した場合には、カーブの開始位置付近に存在する反射板までの距離を計測してライト制御部へ出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されて用いられる道路情報検出装置に関するものである。
【背景技術】
【0002】
従来、車両の現在位置を検出し、地図データから現在位置周辺の地図を読み出してディスプレイに表示するとともに、その地図上に車両の現在位置を表す自車位置マークを表示することで、車両の現在位置を乗員に把握させるナビゲーション装置が知られている。一般に、こうしたナビゲーション装置は、GPSセンサを用いた衛星航法による絶対的な測位データと、ジャイロセンサや車速センサ等を用いた推測航法による相対的な測位データとを併用して車両の現在位置を検出する。このような構成においては、地図データの表す道路と実際の道路との間の誤差等の影響により、検出した現在位置をそのまま用いて地図上に自車位置マークを表示すると、自車位置マークが地図上の道路から外れた位置に表示されてしまう場合がある。そこで、検出した車両の現在位置を地図上の道路と整合するように補正する処理(いわゆるマップマッチング処理)を行い、地図データの表す地図を基準とした車両の位置を求めるようにしている。
【0003】
そして、こうしたマップマッチング処理として、地図データの表す地図を基準とした自車位置精度を向上させるための方式が種々検討されている。例えば、車両の現在位置周辺の道路密度に応じて、車両の現在位置を道路上に補正するか否かを決定する境界値となるパラメータを設定し、設定されたパラメータを用いてマップマッチングを行うことで、道路密度が変化しても常に最適なマップマッチングを行うことができるようにする構成が提案されている(特許文献1参照)。また、道路データに基づき、一定の道路区間を示すリンクにその幅員を加味した2次元の道路面データを作成し、現在位置が道路面データ内に位置しない場合に補正を行うことで、リンク(1次元の線データ)を基準にマッチングするのに比べて誤差を小さくする構成が提案されている(特許文献2参照)。
【0004】
このように、ナビゲーション装置においては、車両の現在位置を地図に整合させて表示することが重要視されており、地図データの表す地図が実際の道路と大きく異なっている場所においても、その道路に整合させて車両の位置を表示することが求められる。
【特許文献1】特開平9−304093号公報
【特許文献2】特開2005−207821号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、近年では、ナビゲーション装置と車両制御とを連携させることにより、道路状況に応じた適切な車両制御を実現することが検討されている。例えば、車両の前面に配設された左右一組の前照灯の光軸方向を道路面に対して水平な面内において調整可能に構成し、地図データの表す地図から判断される道路状況(車両前方の道路方向)に応じて前照灯の光軸方向を調整する構成が考えられている。
【0006】
しかしながら、上述したように、現状のマップマッチング処理では、地図データの表す地図を基準とした自車位置精度を向上させることばかりが検討されており、実際の道路を基準とした自車位置精度についてはあまり考慮されていない。このため、実際の道路を基準とした自車位置精度が十分でなく、特に、道路に沿った自車位置の誤差(前後方向の誤差)により、車両制御に利用した場合には制御のタイミングが適切なタイミングからずれてしまうことが考えられる。こうした問題は、車両制御が安全支援の方向へ進むほど深刻なものとなる。
【0007】
本発明は、こうした問題にかんがみてなされたものであり、実際の道路における車両の位置を精度よく判断することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた本発明の請求項1に記載の道路情報検出装置では、状況取得手段が、位置検出手段により検出された現在位置に基づき、地図記憶手段により記憶されている地図データから車両前方の道路情報を取得する。そして、取得された道路情報が特定の道路情報である場合に、距離計測手段が、道路に存在する検出対象の地物までの距離(地物と車両との間の距離)を計測し、情報出力手段が、距離計測手段により計測された距離を車両の制御用情報として出力する。
【0009】
このような構成の道路情報検出装置によれば、道路における特定の場所に存在する検出対象の地物までの距離を制御用情報として出力することができる。このため、実際の道路における車両の位置を、地図データのみから判断する構成に比べ、精度よく判断することができる。この結果、車両制御の精度を向上させることが可能となる。
【0010】
また、請求項2に記載の道路情報検出装置では、信頼度判断手段が、位置検出手段により検出された現在位置の信頼度を判断する。そして、情報出力手段は、信頼度判断手段により判断された信頼度についても制御用情報として出力する。
【0011】
このような構成の道路情報検出装置によれば、現在位置の信頼度に応じた車両制御を実現させることが可能となる。したがって、現在位置の信頼度に関係なく画一的な車両制御を行う構成に比べ、効果的な車両制御を実現させることが可能となる。
【0012】
また、請求項3に記載の道路情報検出装置では、情報出力手段は、距離計測手段により距離が計測された時刻についても制御用情報として出力する。
このような構成の道路情報検出装置によれば、検出対象の地物までの距離が計測されてから車両制御を実行するまでに要する時間を加味した車両制御を実現させることが可能となる。すなわち、検出対象の地物までの距離は車両の走行に伴い変化するため、距離の計測から車両制御の実行までのタイムラグを加味した車両制御を実現できるようにしている。この結果、車両制御の精度を一層向上させることが可能となる。
【0013】
また、請求項4に記載の道路情報検出装置では、距離計測手段は、状況取得手段により取得された道路情報に応じて検出対象とする地物の種類を変化させる。
このような構成の道路情報検出装置によれば、状況に適した地物を検出することにより、道路における車両の位置を様々な場所で検出することができる。この結果、複数種類の車両制御に利用するといったことが可能となる。
【0014】
次に、請求項5に記載のプログラムは、請求項1から請求項4までのいずれか1項に記載の道路情報検出装置における状況取得手段、距離計測手段及び情報出力手段としてコンピュータを機能させるためのものである。このようなプログラムを、位置検出手段及び地図記憶手段を備えたコンピュータに実行させれば、上述した道路情報検出装置と同様の作用効果を得ることができる。特に、プログラムはネットワーク等を用いて流通させることも可能である上、プログラムの入れ替えは部品の入れ替えに比較して容易であるため、道路情報検出装置の機能向上等を容易に行うことができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明が適用された実施形態について、図面を用いて説明する。
[第1実施形態]
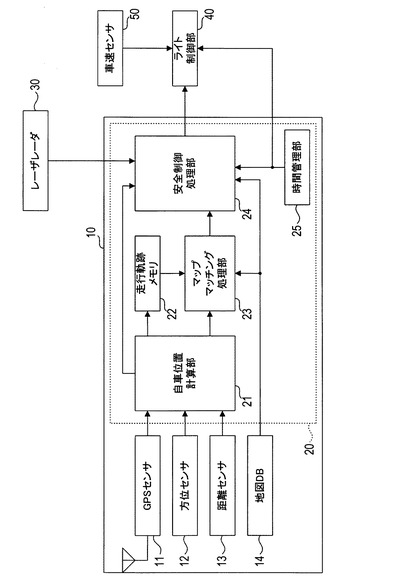
図1は、第1実施形態の道路情報検出装置としてのナビゲーション装置10の概略構成を示すブロック図である。
【0016】
ナビゲーション装置10は、車両に搭載された状態で用いられるものであり、GPSセンサ11と、方位センサ12と、距離センサ13と、地図データベース14と、制御部20とを備えている。
【0017】
GPSセンサ11は、GPS(Global Positioning System)用の人工衛星からの電波をGPSアンテナを介して受信し、車両の現在位置(緯度、経度及び高度)を検出する。
【0018】
方位センサ12は、地磁気に基づき車両の絶対方位を検出する。
距離センサ13は、車両の走行距離を検出する。
地図データベース14は、ハードディスク装置(HDD)によって構成されており、ノード及びリンクに関するデータを含んだ地図データが記憶されている。ここで、ノードデータとは、道路の交差点や分岐点を表すデータである。また、リンクデータとは、ノードとノードとをつなぐ道路を表すデータである。なお、地図データベース14は、ハードディスク装置に限定されるものではなく、例えば、磁気ディスク、光磁気ディスク、半導体製メモリ等などの可搬型記憶媒体から地図データを読み出す構成とすることも可能である。
【0019】
制御部20は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、各種処理を実行する。例えば、GPSセンサ11、方位センサ12及び距離センサ13からの各検出信号に基づき車両の現在位置を算出するとともに、地図データベース14に記憶されている地図データから現在位置周辺の地図を読み出して、車両の現在位置を表す自車位置マークとともに図示しない表示部(ディスプレイ)に表示させる現在位置表示処理や、現在位置から目的地までの最適な経路を検索して案内する経路案内処理等を実行する。なお、ROMには、後述する処理(図3〜図6)を実行するためのプログラムが記憶されている。
【0020】
また、制御部20には、車両に搭載されたレーザレーダ30からの情報が入力される。
レーザレーダ30は、車両の前面中央に配置され、指向性を有するレーザ光を左右に振りながら発射する送信部及び送信部から発射されたレーザ光の反射光を受信する受信部等を備えている。そして、送信部から発射されるレーザ光と、受信部にて受信された反射光とに基づいて、車両前方の物体を検出するとともに、その物体の車両に対する相対位置を計測する。
【0021】
一方、制御部20は、車両に搭載されたライト制御部40に対し、地図データから取得した車両前方の道路情報(少なくとも道路形状が把握可能な情報)と、マップマッチング処理による補正後の現在位置とを制御用情報として定期的に出力する。さらに、制御部20は、ライト制御部40により行われる車両制御の高精度化を図るため、現在位置の信頼度と、道路に存在する検出対象の地物までの距離の実測値(以下「地物距離」という。)と、地物距離を計測した時刻(以下「距離計測時刻」という。)とについても制御用情報として出力する。
【0022】
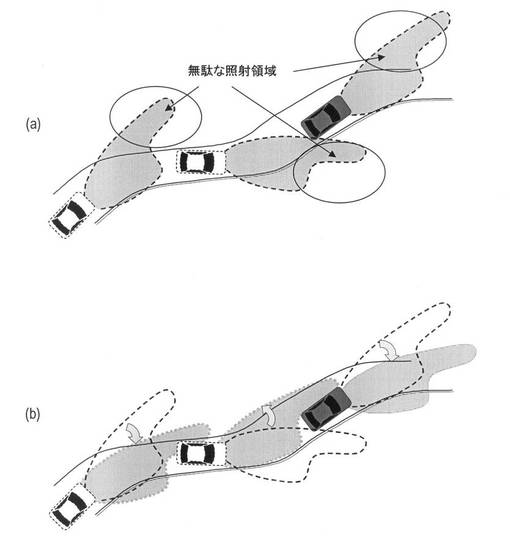
ライト制御部40は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、ナビゲーション装置10の制御部20と通信ラインを介して通信可能に接続されている。そして、ライト制御部40は、制御部20から定期的に出力される制御用情報に基づき、車両の前面に配置された左右一組の前照灯の光軸方向を変化させる制御(ライト制御)を行う。すなわち、前照灯の光軸方向が固定されている場合、前方の道路がカーブしていると前照灯の光が車両の進行方向へ適切に照射されない(無駄な照射領域が生じる)ため(図2(a)参照)、前方の道路がカーブしている場合には、前照灯の光軸方向を進行方向へ照射されるように制御するのである(図2(b)参照)。具体的には、制御部20から入力した車両前方の道路情報及び補正後の現在位置に基づいて前方道路のカーブ状態を判断し、前方道路が右カーブの場合にはそのカーブの度合いに応じて前照灯の光軸方向を右方向に調整し、前方道路が左カーブの場合にはそのカーブの度合いに応じて前照灯の光軸方向を左方向に調整する。特に、本実施形態では、ライト制御部40は、制御部20から入力した現在位置の信頼度が低いほど、光軸方向の調整量(調整角度)を小さくする。例えば、信頼度が中程度の場合には、光軸方向の調整量を、信頼度が高い場合の調整量の70%に抑え、信頼度が低い場合には、信頼度が高い場合の調整量の40%に抑える。このようにすることで、制御部20から入力した情報の誤差が大きい場合に生じる制御の悪化を低減するようにしている。
【0023】
さらに、ライト制御部40は、制御部20から入力した地物距離及び距離計測時刻に基づき、ライト制御のタイミングを補正する。すなわち、制御部20から入力した車両前方の道路情報(地図データから取得した道路情報)及びマップマッチング処理による補正後の現在位置に基づいて(つまり、地図上の道路形状及び自車位置に基づいて)一応の制御タイミングは判断可能であるが、地図上の道路における車両の現在位置は、実際の道路における車両の現在位置に対して誤差があることが考えられる。そこで、ライト制御を実行すべき道路(カーブ路)に存在する検出対象の地物(本実施形態では反射板)までの距離を目安にカーブの開始位置を判断し、制御タイミングを補正するのである。具体的には、距離計測時刻からの経過時間に応じて地物距離を補正し、補正後の地物距離に基づき制御を行う。すなわち、まず、ナビゲーション装置10から入力した距離計測時刻と時間管理部25からの入力に基づく現在時刻との差に基づき、地物距離が計測されてからの経過時間(タイムラグ)を算出する。そして、車両に搭載された車速センサ50により検出される車両の速度に経過時間を乗ずることにより、地物距離が計測されてからのおおよその走行距離を算出し、この走行距離を地物距離から減ずることにより、地物距離を補正する。このようにすることで、地物距離計測時から制御実行時までの間の車両の移動分を加味した補正を行うことができる。
【0024】
次に、ナビゲーション装置10の制御部20が実行する処理の具体的内容について説明する。
制御部20は、自車位置計算部21、走行軌跡メモリ22、マップマッチング処理部23及び安全制御処理部24として機能する。また、制御部20は、安全制御処理部24及びライト制御部40に対して共通の時刻(基準時刻)を提供するための時間管理部25としても機能する。図1にはその機能ブロック図を示している。なお、これら各構成要素はそれぞれ独立したハードウェアで構成する必要はなく、共通化することが可能である。
【0025】
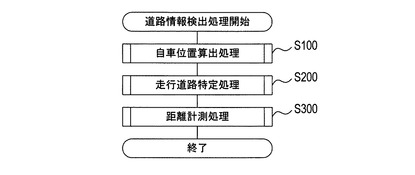
そして、制御部20は、図3のフローチャートに示す道路情報検出処理を定期的(時間tごと(例えば100msごと))に実行する。すなわち、この道路情報検出処理が開始されると、まずS100で、自車位置計算部21が、後述する自車位置算出処理を行う(図4)。続いて、S200では、マップマッチング処理部23が、後述する走行道路特定処理を行う(図5)。続いて、S300では、安全制御処理部24が、後述する距離計測処理を行う(図6)。その後、道路情報検出処理を終了する。
【0026】
ここで、S100,S200,S300の各処理内容について具体的に説明する。
まず、自車位置計算部21が実行する自車位置算出処理(S100)について、図4のフローチャートを用いて説明する。
【0027】
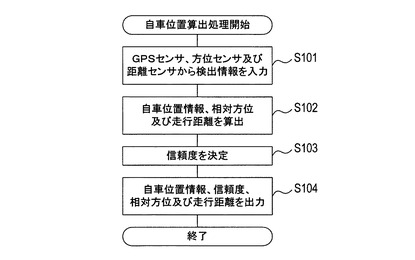
この自車位置算出処理が開始されると、まずS101で、GPSセンサ11、方位センサ12及び距離センサ13から検出情報を入力する。
続いて、S102では、S101で入力した検出情報に基づき、車両の現在位置及び絶対方位(以下、これらを「自車位置情報」という。)と、時間tだけ前の状態を基準とした相対方位及び走行距離とを算出する。
【0028】
続いて、S103では、GPSセンサ11により検出された車両の現在位置の精度を表す予測誤差を算出し、算出した予測誤差の大きさに基づき現在位置の信頼度を判断する。本実施形態では、予測誤差が低い場合(例えばしきい値A1未満の場合)には信頼度を「高」、予測誤差が高い場合(例えばしきい値A2(>A1)以上の場合)には信頼度を「低」、予測誤差がしきい値A1以上A2未満の場合には信頼度を「中」とする。つまり、信頼度を3段階で評価するようにしている。ここで、予測誤差の算出方法としては種々の方法が考えられるが、本実施形態では、GPSセンサ11により電波が受信された人工衛星の数が多いほど予測誤差が小さくなるという評価方法で予測誤差を算出する。なお、マルチパスによる影響を考慮して予測誤差を算出するようにしてもよいし、人工衛星の配置に基づき予測誤差を算出するようにしてもよい(DOP:Dilution Of Precision)。また、カルマンフィルタ等のフィルタ処理によりセンサの誤差補正を行う場合には、その誤差補正に基づき予測誤差を算出してもよい。具体的には、センサの検出情報に含まれるノイズ等を収束させる学習ロジックが用いられている場合に、学習が進行しているほど(安定した検出情報が得られる状態であるほど)予測誤差を小さく算出するといった方法が考えられる。
【0029】
続いて、S104では、相対方位及び走行距離を走行軌跡メモリ22へ出力し、自車位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力し、さらに、信頼度を安全制御処理部24へ出力する。その後、自車位置算出処理を終了する。なお、走行軌跡メモリ22は、自車位置計算部21相対方位及び走行距離を入力すると、これらを走行軌跡データとして記憶(蓄積)する。
【0030】
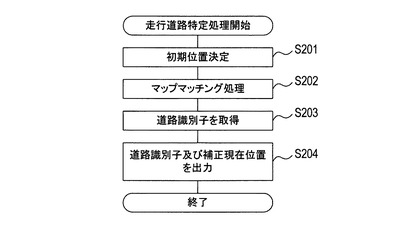
次に、マップマッチング処理部23が実行する走行道路特定処理(S200)について、図5のフローチャートを用いて説明する。
この走行道路特定処理が開始されると、まずS201で、自車位置計算部21から入力した自車位置情報に基づいて初期位置を決定する。
【0031】
続いて、S202では、地図データベース14に記憶されている地図データの表す地図を基準として車両の現在位置を補正するマップマッチング処理を行う。具体的には、走行軌跡メモリ22に記憶されている走行軌跡データの表す走行軌跡と、地図データの表す道路パターンとを比較し、走行軌跡と最も相関の高い道路パターンを走行中の道路として判別して(パターンマッチング)、その道路パターンと整合するように車両の現在位置を補正する。
【0032】
続いて、S203では、車両が走行中の道路の識別情報である道路識別子(地図データに含まれるリンクの識別子)を地図データから取得する。
続いて、S204では、S203で取得した道路識別子と、マップマッチング処理による補正後の現在位置(以下「補正現在位置」という。)とを、安全制御処理部24へ出力する。その後、走行道路特定処理を終了する。
【0033】
次に、安全制御処理部24が実行する距離計測処理(S300)について、図6のフローチャートを用いて説明する。なお、安全制御処理部24は、この距離計測処理の開始時に時間管理部25から基準時刻を入力する。
【0034】
この距離計測処理が開始されると、まずS301で、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子と、地図データベース14に記憶されている地図データとに基づいて、車両前方の道路情報である前方道路情報(少なくとも道路形状が把握可能な情報)を地図データから取得する。
【0035】
続いて、S302では、S301で取得した前方道路情報に基づき、車両の前方にカーブが存在しているか否かを判定する。
そして、S302で、車両の前方にカーブが存在していると判定した場合には、S303へ移行し、レーザレーダ30からの検出情報に基づき、カーブの開始位置付近に存在する反射板までの距離(地物距離)を計測する。具体的には、まず、道路に存在する反射板の相対位置(車両からの距離及び方向)を計測する(図7参照)。カーブ路には複数の反射板が道路に沿って設置されているのが通常であるため、複数の反射板についての相対位置が計測され、こうして計測された複数の反射板の相対位置から前方の道路形状を推測することができる。そして、推測した道路形状に基づき、カーブの開始位置付近に存在する反射板を特定するのである。
【0036】
続いて、S304では、S301で取得した前方道路情報と、S303で計測した地物距離と、地物距離を計測した時刻(距離計測時刻)と、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置とを、ライト制御部40へ出力する。その後、距離計測処理を終了する。
【0037】
一方、S302で、車両の前方にカーブが存在していないと判定した場合には、S303,S304の処理を行うことなくそのまま距離計測処理を終了する。なお、車両の前方にカーブが存在していても、前照灯が点灯されていなければそのまま距離計測処理を終了するようにしてもよい。
【0038】
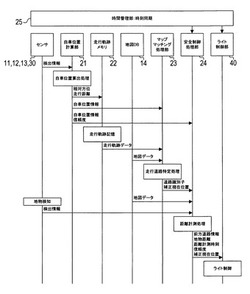
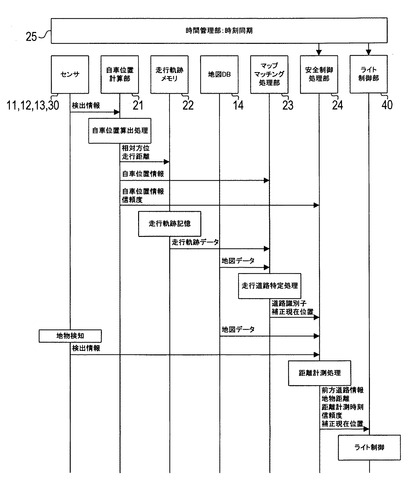
次に、第1実施形態のナビゲーション装置10により実行される処理の概要について、図8のタイムチャートを用いて説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出情報に基づき、自車位置情報(現在位置及び絶対方位)、相対方位及び走行距離を定期的に算出する。また、現在位置についてはその信頼度を判断する。そして、相対方位及び走行距離を走行軌跡メモリ22へ出力し、自車位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力し、さらに、信頼度を安全制御処理部24へ出力する。
【0039】
走行軌跡メモリ22は、自車位置計算部21から入力した相対方位及び走行距離を走行軌跡データとして記憶する。
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行い、車両の現在位置を補正するとともに地図データから道路識別子を取得する。そして、道路識別子及び補正現在位置を安全制御処理部24へ出力する。
【0040】
安全制御処理部24は、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子と、地図データベース14に記憶されている地図データとに基づいて、地図データから前方道路情報を取得する。そして、取得した前方道路情報に基づき、車両の前方にカーブが存在していると判定した場合には、レーザレーダ30からの検出情報に基づき、カーブの開始位置付近に存在する反射板までの距離(地物距離)を計測する。そして、前方道路情報と、地物距離と、距離計測時刻と、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置とを、ライト制御部40へ出力する。
【0041】
これにより、ライト制御部40では、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態が判断され、地物距離及び距離計測時刻に基づきライト制御のタイミングが補正された上で、ライト制御が行われる。
【0042】
以上説明した第1実施形態のナビゲーション装置10によれば、カーブの開始位置に存在する反射板までの距離(地物距離)を制御用情報としてライト制御部40へ出力することができる。このため、ライト制御部40においては、実際の道路における車両の位置を地図データのみから判断する構成に比べ、高精度のライト制御を実現することができる。
【0043】
また、ナビゲーション装置10は、現在位置の信頼度をライト制御部40へ出力するようにしているため、ライト制御部40においては、信頼度に応じた効果的なライト制御を実現することができる。
【0044】
さらに、ナビゲーション装置10は、距離計測時刻をライト制御部40へ出力するようにしているため、地物距離の検出からライト制御を実行するまでに要する時間(タイムラグ)を加味した高精度のライト制御を実現させることができる。
【0045】
なお、第1実施形態では、ライト制御部40が、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断するようにしているが、これに限定されるものではない。例えば、ライト制御部40が、地図データベース14から地図データを直接入力して前方道路のカーブ状態を判断するように構成することも可能である。
【0046】
また、第1実施形態のナビゲーション装置10では、GPSセンサ11が、本発明の位置検出手段に相当し、地図データベース14が、本発明の地図記憶手段に相当する。また、S103の処理を実行する制御部20が、本発明の信頼度判断手段に相当し、S301の処理を実行する制御部20が、本発明の状況取得手段に相当し、S303の処理を実行する制御部20が、本発明の距離計測手段に相当し、S304の処理を実行する制御部20が、本発明の情報出力手段に相当する。
【0047】
[第2実施形態]
次に、第2実施形態のナビゲーション装置10について説明する。
第2実施形態のナビゲーション装置10は、基本的な構成は第1実施形態のものと同一であるが、第1実施形態とは異なる機能を有するライト制御部40を対象として構成されており、出力する情報が異なる。具体的には、第2実施形態のナビゲーション装置10は、第1実施形態でライト制御部40へ出力した情報(前方道路情報、地物距離、距離計測時刻、信頼度及び補正現在位置)に加え、自車位置情報及び道路識別子をライト制御部40へ出力する。以下、具体的に説明するが、説明の重複を避けるため、第1実施形態と共通の構成については同一符号を付して説明を省略している。
【0048】
第2実施形態のナビゲーション装置10が対象とするライト制御部40は、ナビゲーション装置10の制御部20から入力した自車位置情報を軌跡情報として記憶(蓄積)する。具体的には、制御部20から自車位置情報を、その自車位置情報とともに入力した信頼度及び道路識別子と関連付けて記憶する。このように自車位置情報を記憶していくことで、自車位置情報の軌跡による局所的な道路情報が作成されることになる。この道路情報は、自車位置情報の信頼度が高い場合や、地図データの表す道路の精度が低い場合には、地図データよりも精度の高いものとなる。なお、同一の道路に関する軌跡情報が既に記憶されている場合には、情報を更新しないようにしてもよく、逆に、常に更新するようにしてもよい。また、既に記憶されている自車位置情報の信頼度に比べ新たに入力した自車位置情報の信頼度の方が大きい場合にのみ情報を更新してもよい。さらに、信頼度のレベルが同じの場合には、既に記憶されている自車位置情報との平均値をとってその平均値に更新するようにしてもよい。
【0049】
そして、ライト制御部40は、軌跡情報が記憶されていない場所においてライト制御を行う場合には、第1実施形態と同様、制御部20から入力した前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断する。つまり、地図データに基づき道路形状を判断する。一方、軌跡情報が既に記憶されている場所(制御部20から入力した道路識別子と軌跡情報として記憶されている道路識別子とが一致する場所)においてライト制御を行う場合には、その軌跡情報及び自車位置情報に基づいて前方道路のカーブ状態を判断する。なお、軌跡情報が既に記憶されている場所においても、軌跡情報の信頼度が低い場合や、地図データの表す道路の精度が高いと判断される場所(例えば都市部)の場合には、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断するようにしてもよい。
【0050】
このようなライト制御部40を対象としていることから、第2実施形態のナビゲーション装置10において、制御部20は、自車位置情報及び道路識別子をライト制御部40へ出力する。具体的には、距離計測処理(図6)のS304において、前方道路情報、地物距離、距離計測時刻、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置に加え、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子とを、ライト制御部40へ出力する。
【0051】
以上説明した第2実施形態のナビゲーション装置10によれば、第1実施形態と同様の効果を得ることができる。特に、第2実施形態のナビゲーション装置10は、自車位置情報をライト制御部40へ出力するようにしているため、ライト制御部40においては、自車位置情報から作成した軌跡情報に基づく高精度のライト制御を実現することができる。
【0052】
なお、既に走行したことのある道路においては、前方道路情報や補正現在位置を制御部20からライト制御部40へ出力しないようにしてもよい。また、既に走行したことのある道路においては、マップマッチング処理自体を行わない構成とすることも可能である。
【0053】
以上、本発明の一実施形態について説明したが、本発明は、種々の形態を採り得ることは言うまでもない。
例えば、上記実施形態のナビゲーション装置10では、道路に沿って設置されている複数の反射板のうち、カーブの開始位置付近に存在する反射板までの距離を地物距離としてライト制御部40へ出力するようにしているが、これに限定されるものではない。すなわち、検出されたすべての反射板についての距離及び方向(相対位置)をライト制御部40へ出力し、ライト制御部40において、複数の反射板についての情報に基づき道路形状やカーブ開始位置を判断するように構成することも可能である。なお、地物までの距離そのものではなく、例えば複数の距離の平均値を出力するようにしてもよい。
【0054】
また、上記実施形態では、ライト制御部40が、制御部20から入力した信頼度に応じた車両制御として、前照灯の調整量を変更する構成を例示しているが、信頼度に応じた車両制御としては種々の制御が考えられる。例えば、信頼度が高い場合には左右の前照灯を調整し、信頼度に応じて片方の前照灯のみを調整するといった構成が可能である。また、信頼度に応じて実行可能な車両制御の項目を変更するようにしてもよい。例えば、信頼度が高い場合には、前照灯の制御に加え、道路情報に応じた制動力の制御を行い、信頼度が中程度の場合には前照灯の制御のみを行い、信頼度が低い場合には道路情報に応じた車両制御を行わないように構成することも可能である。
【0055】
一方、上記実施形態では、車両制御としてライト制御を行うライト制御部40に対し、道路に存在する検出対象の地物(反射板)までの距離等の情報を出力する構成のナビゲーション装置10を例示したが、これに限定されるものではなく、その他の車両制御を行う車両制御部へ各種情報を出力するように構成してもよい。ここで、その他の車両制御としては、例えば次のような車両制御が挙げられる。
【0056】
(1)踏切侵入時の車両制御(減速制御、運転席側サイドガラス開制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、遮断機を検出対象の地物とし、遮断機までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、踏切までの距離を正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0057】
(2)また、トンネル侵入時の車両制御(前照灯点灯制御、窓閉制御、エアコン内気切替制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、トンネル入り口に設置されている看板を検出対象の地物とし、看板までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、トンネルに侵入したタイミングを正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0058】
(3)また、交差点侵入時の車両制御(ウインカ制御、音声案内制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、交差点に設置された信号機を検出対象の地物とし、信号機までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、交差点までの距離を正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0059】
また、上記実施形態のナビゲーション装置10では、検出対象の地物を反射板のみとしているが、これに限定されるものではなく、例えば上記(1)〜(3)のような地物についても検出対象としてもよい。具体的には、距離計測処理(図6)のS302において、前方道路情報に基づき、車両の前方にカーブ、踏切、トンネル又は交差点が存在しているか否かを判定する。そして、カーブが存在していると判定した場合には検出対象の地物を反射板に特定し、同様に、踏切の場合には遮断機に、トンネルの場合には看板に、交差点の場合には信号機に、検出対象の地物を特定する。そして、特定した対象地物までの距離を地物距離として計測する。つまり、前方道路情報に応じて検出対象とする地物の種類を変化させるのである。このようにすれば、ナビゲーション装置10からの情報を複数種類の車両制御に利用することができる。
【0060】
また、上記実施形態のナビゲーション装置10では、検出対象の地物をレーザレーダ30により検出するようにしているが、これに限定されるものではない。すなわち、検出対象の地物を検出する手段としては、レーザレーダの他、例えば、ミリ波レーダ、カメラ、赤外線センサ等を用いることが可能である。また、こうした手段を組み合わせて用いることにより検出精度の向上を図ることも可能である。
【0061】
さらに、上記実施形態では、時刻に関する情報として、地物距離を計測した時刻のみをライト制御部40へ出力しているが、これに限定されるものではなく、例えば、車両の現在位置や絶対方位等を検出した時刻や、道路識別子を判定した時刻などについてもライト制御部40へ出力するようにしてもよい。このようにすることで、ライト制御部40においては、地物距離の補正をより高精度に行うことが可能となる。
【0062】
また、時刻をそのまま出力するのではなく、時刻に車両の速度を乗じて距離の形に変換した上で出力するようにしてもよい。具体的には、ナビゲーション装置10が車速センサ50からの検出情報を入力し、ライト制御部40へ出力すべき情報についての時刻(その情報を検出、判定等した時刻)と現在時刻との差に車速を乗ずることで、検出、判定等した時刻から現時点までの車両の走行距離を算出する。そして、その算出した走行距離(又は、算出した走行距離を地物距離から差し引いた距離(補正後の地物距離))を、時刻に替えてライト制御部40へ出力するのである。このようにすれば、ライト制御部40における車速センサ50の検出情報の入力を不要とすることも可能となる。
【0063】
なお、時刻に関する情報や信頼度をライト制御部40へ出力しないように構成することも可能である。
また、上記実施形態では、ナビゲーション装置10からライト制御部40へ情報を提供するシステムを例示したが、これに限定されるものではなく、これらを一体とした装置として構成してもよい。また、本発明が適用される装置はナビゲーション装置に限定されない。
【図面の簡単な説明】
【0064】
【図1】第1実施形態のナビゲーション装置の概略構成を示すブロック図である。
【図2】ライト制御の説明図である。
【図3】道路情報検出処理のフローチャートである。
【図4】自車位置算出処理のフローチャートである。
【図5】走行道路特定処理のフローチャートである。
【図6】距離計測処理のフローチャートである。
【図7】地物距離計測の説明図である。
【図8】ナビゲーション装置により実行される処理のタイムチャートである。
【符号の説明】
【0065】
10…ナビゲーション装置、11…GPSセンサ、12…方位センサ、13…距離センサ、14…地図データベース、20…制御部、21…自車位置計算部、22…走行軌跡メモリ、23…マップマッチング処理部、24…安全制御処理部、25…時間管理部、30…レーザレーダ、40…ライト制御部、50…車速センサ
【技術分野】
【0001】
本発明は、車両に搭載されて用いられる道路情報検出装置に関するものである。
【背景技術】
【0002】
従来、車両の現在位置を検出し、地図データから現在位置周辺の地図を読み出してディスプレイに表示するとともに、その地図上に車両の現在位置を表す自車位置マークを表示することで、車両の現在位置を乗員に把握させるナビゲーション装置が知られている。一般に、こうしたナビゲーション装置は、GPSセンサを用いた衛星航法による絶対的な測位データと、ジャイロセンサや車速センサ等を用いた推測航法による相対的な測位データとを併用して車両の現在位置を検出する。このような構成においては、地図データの表す道路と実際の道路との間の誤差等の影響により、検出した現在位置をそのまま用いて地図上に自車位置マークを表示すると、自車位置マークが地図上の道路から外れた位置に表示されてしまう場合がある。そこで、検出した車両の現在位置を地図上の道路と整合するように補正する処理(いわゆるマップマッチング処理)を行い、地図データの表す地図を基準とした車両の位置を求めるようにしている。
【0003】
そして、こうしたマップマッチング処理として、地図データの表す地図を基準とした自車位置精度を向上させるための方式が種々検討されている。例えば、車両の現在位置周辺の道路密度に応じて、車両の現在位置を道路上に補正するか否かを決定する境界値となるパラメータを設定し、設定されたパラメータを用いてマップマッチングを行うことで、道路密度が変化しても常に最適なマップマッチングを行うことができるようにする構成が提案されている(特許文献1参照)。また、道路データに基づき、一定の道路区間を示すリンクにその幅員を加味した2次元の道路面データを作成し、現在位置が道路面データ内に位置しない場合に補正を行うことで、リンク(1次元の線データ)を基準にマッチングするのに比べて誤差を小さくする構成が提案されている(特許文献2参照)。
【0004】
このように、ナビゲーション装置においては、車両の現在位置を地図に整合させて表示することが重要視されており、地図データの表す地図が実際の道路と大きく異なっている場所においても、その道路に整合させて車両の位置を表示することが求められる。
【特許文献1】特開平9−304093号公報
【特許文献2】特開2005−207821号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、近年では、ナビゲーション装置と車両制御とを連携させることにより、道路状況に応じた適切な車両制御を実現することが検討されている。例えば、車両の前面に配設された左右一組の前照灯の光軸方向を道路面に対して水平な面内において調整可能に構成し、地図データの表す地図から判断される道路状況(車両前方の道路方向)に応じて前照灯の光軸方向を調整する構成が考えられている。
【0006】
しかしながら、上述したように、現状のマップマッチング処理では、地図データの表す地図を基準とした自車位置精度を向上させることばかりが検討されており、実際の道路を基準とした自車位置精度についてはあまり考慮されていない。このため、実際の道路を基準とした自車位置精度が十分でなく、特に、道路に沿った自車位置の誤差(前後方向の誤差)により、車両制御に利用した場合には制御のタイミングが適切なタイミングからずれてしまうことが考えられる。こうした問題は、車両制御が安全支援の方向へ進むほど深刻なものとなる。
【0007】
本発明は、こうした問題にかんがみてなされたものであり、実際の道路における車両の位置を精度よく判断することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた本発明の請求項1に記載の道路情報検出装置では、状況取得手段が、位置検出手段により検出された現在位置に基づき、地図記憶手段により記憶されている地図データから車両前方の道路情報を取得する。そして、取得された道路情報が特定の道路情報である場合に、距離計測手段が、道路に存在する検出対象の地物までの距離(地物と車両との間の距離)を計測し、情報出力手段が、距離計測手段により計測された距離を車両の制御用情報として出力する。
【0009】
このような構成の道路情報検出装置によれば、道路における特定の場所に存在する検出対象の地物までの距離を制御用情報として出力することができる。このため、実際の道路における車両の位置を、地図データのみから判断する構成に比べ、精度よく判断することができる。この結果、車両制御の精度を向上させることが可能となる。
【0010】
また、請求項2に記載の道路情報検出装置では、信頼度判断手段が、位置検出手段により検出された現在位置の信頼度を判断する。そして、情報出力手段は、信頼度判断手段により判断された信頼度についても制御用情報として出力する。
【0011】
このような構成の道路情報検出装置によれば、現在位置の信頼度に応じた車両制御を実現させることが可能となる。したがって、現在位置の信頼度に関係なく画一的な車両制御を行う構成に比べ、効果的な車両制御を実現させることが可能となる。
【0012】
また、請求項3に記載の道路情報検出装置では、情報出力手段は、距離計測手段により距離が計測された時刻についても制御用情報として出力する。
このような構成の道路情報検出装置によれば、検出対象の地物までの距離が計測されてから車両制御を実行するまでに要する時間を加味した車両制御を実現させることが可能となる。すなわち、検出対象の地物までの距離は車両の走行に伴い変化するため、距離の計測から車両制御の実行までのタイムラグを加味した車両制御を実現できるようにしている。この結果、車両制御の精度を一層向上させることが可能となる。
【0013】
また、請求項4に記載の道路情報検出装置では、距離計測手段は、状況取得手段により取得された道路情報に応じて検出対象とする地物の種類を変化させる。
このような構成の道路情報検出装置によれば、状況に適した地物を検出することにより、道路における車両の位置を様々な場所で検出することができる。この結果、複数種類の車両制御に利用するといったことが可能となる。
【0014】
次に、請求項5に記載のプログラムは、請求項1から請求項4までのいずれか1項に記載の道路情報検出装置における状況取得手段、距離計測手段及び情報出力手段としてコンピュータを機能させるためのものである。このようなプログラムを、位置検出手段及び地図記憶手段を備えたコンピュータに実行させれば、上述した道路情報検出装置と同様の作用効果を得ることができる。特に、プログラムはネットワーク等を用いて流通させることも可能である上、プログラムの入れ替えは部品の入れ替えに比較して容易であるため、道路情報検出装置の機能向上等を容易に行うことができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明が適用された実施形態について、図面を用いて説明する。
[第1実施形態]
図1は、第1実施形態の道路情報検出装置としてのナビゲーション装置10の概略構成を示すブロック図である。
【0016】
ナビゲーション装置10は、車両に搭載された状態で用いられるものであり、GPSセンサ11と、方位センサ12と、距離センサ13と、地図データベース14と、制御部20とを備えている。
【0017】
GPSセンサ11は、GPS(Global Positioning System)用の人工衛星からの電波をGPSアンテナを介して受信し、車両の現在位置(緯度、経度及び高度)を検出する。
【0018】
方位センサ12は、地磁気に基づき車両の絶対方位を検出する。
距離センサ13は、車両の走行距離を検出する。
地図データベース14は、ハードディスク装置(HDD)によって構成されており、ノード及びリンクに関するデータを含んだ地図データが記憶されている。ここで、ノードデータとは、道路の交差点や分岐点を表すデータである。また、リンクデータとは、ノードとノードとをつなぐ道路を表すデータである。なお、地図データベース14は、ハードディスク装置に限定されるものではなく、例えば、磁気ディスク、光磁気ディスク、半導体製メモリ等などの可搬型記憶媒体から地図データを読み出す構成とすることも可能である。
【0019】
制御部20は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、各種処理を実行する。例えば、GPSセンサ11、方位センサ12及び距離センサ13からの各検出信号に基づき車両の現在位置を算出するとともに、地図データベース14に記憶されている地図データから現在位置周辺の地図を読み出して、車両の現在位置を表す自車位置マークとともに図示しない表示部(ディスプレイ)に表示させる現在位置表示処理や、現在位置から目的地までの最適な経路を検索して案内する経路案内処理等を実行する。なお、ROMには、後述する処理(図3〜図6)を実行するためのプログラムが記憶されている。
【0020】
また、制御部20には、車両に搭載されたレーザレーダ30からの情報が入力される。
レーザレーダ30は、車両の前面中央に配置され、指向性を有するレーザ光を左右に振りながら発射する送信部及び送信部から発射されたレーザ光の反射光を受信する受信部等を備えている。そして、送信部から発射されるレーザ光と、受信部にて受信された反射光とに基づいて、車両前方の物体を検出するとともに、その物体の車両に対する相対位置を計測する。
【0021】
一方、制御部20は、車両に搭載されたライト制御部40に対し、地図データから取得した車両前方の道路情報(少なくとも道路形状が把握可能な情報)と、マップマッチング処理による補正後の現在位置とを制御用情報として定期的に出力する。さらに、制御部20は、ライト制御部40により行われる車両制御の高精度化を図るため、現在位置の信頼度と、道路に存在する検出対象の地物までの距離の実測値(以下「地物距離」という。)と、地物距離を計測した時刻(以下「距離計測時刻」という。)とについても制御用情報として出力する。
【0022】
ライト制御部40は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、ナビゲーション装置10の制御部20と通信ラインを介して通信可能に接続されている。そして、ライト制御部40は、制御部20から定期的に出力される制御用情報に基づき、車両の前面に配置された左右一組の前照灯の光軸方向を変化させる制御(ライト制御)を行う。すなわち、前照灯の光軸方向が固定されている場合、前方の道路がカーブしていると前照灯の光が車両の進行方向へ適切に照射されない(無駄な照射領域が生じる)ため(図2(a)参照)、前方の道路がカーブしている場合には、前照灯の光軸方向を進行方向へ照射されるように制御するのである(図2(b)参照)。具体的には、制御部20から入力した車両前方の道路情報及び補正後の現在位置に基づいて前方道路のカーブ状態を判断し、前方道路が右カーブの場合にはそのカーブの度合いに応じて前照灯の光軸方向を右方向に調整し、前方道路が左カーブの場合にはそのカーブの度合いに応じて前照灯の光軸方向を左方向に調整する。特に、本実施形態では、ライト制御部40は、制御部20から入力した現在位置の信頼度が低いほど、光軸方向の調整量(調整角度)を小さくする。例えば、信頼度が中程度の場合には、光軸方向の調整量を、信頼度が高い場合の調整量の70%に抑え、信頼度が低い場合には、信頼度が高い場合の調整量の40%に抑える。このようにすることで、制御部20から入力した情報の誤差が大きい場合に生じる制御の悪化を低減するようにしている。
【0023】
さらに、ライト制御部40は、制御部20から入力した地物距離及び距離計測時刻に基づき、ライト制御のタイミングを補正する。すなわち、制御部20から入力した車両前方の道路情報(地図データから取得した道路情報)及びマップマッチング処理による補正後の現在位置に基づいて(つまり、地図上の道路形状及び自車位置に基づいて)一応の制御タイミングは判断可能であるが、地図上の道路における車両の現在位置は、実際の道路における車両の現在位置に対して誤差があることが考えられる。そこで、ライト制御を実行すべき道路(カーブ路)に存在する検出対象の地物(本実施形態では反射板)までの距離を目安にカーブの開始位置を判断し、制御タイミングを補正するのである。具体的には、距離計測時刻からの経過時間に応じて地物距離を補正し、補正後の地物距離に基づき制御を行う。すなわち、まず、ナビゲーション装置10から入力した距離計測時刻と時間管理部25からの入力に基づく現在時刻との差に基づき、地物距離が計測されてからの経過時間(タイムラグ)を算出する。そして、車両に搭載された車速センサ50により検出される車両の速度に経過時間を乗ずることにより、地物距離が計測されてからのおおよその走行距離を算出し、この走行距離を地物距離から減ずることにより、地物距離を補正する。このようにすることで、地物距離計測時から制御実行時までの間の車両の移動分を加味した補正を行うことができる。
【0024】
次に、ナビゲーション装置10の制御部20が実行する処理の具体的内容について説明する。
制御部20は、自車位置計算部21、走行軌跡メモリ22、マップマッチング処理部23及び安全制御処理部24として機能する。また、制御部20は、安全制御処理部24及びライト制御部40に対して共通の時刻(基準時刻)を提供するための時間管理部25としても機能する。図1にはその機能ブロック図を示している。なお、これら各構成要素はそれぞれ独立したハードウェアで構成する必要はなく、共通化することが可能である。
【0025】
そして、制御部20は、図3のフローチャートに示す道路情報検出処理を定期的(時間tごと(例えば100msごと))に実行する。すなわち、この道路情報検出処理が開始されると、まずS100で、自車位置計算部21が、後述する自車位置算出処理を行う(図4)。続いて、S200では、マップマッチング処理部23が、後述する走行道路特定処理を行う(図5)。続いて、S300では、安全制御処理部24が、後述する距離計測処理を行う(図6)。その後、道路情報検出処理を終了する。
【0026】
ここで、S100,S200,S300の各処理内容について具体的に説明する。
まず、自車位置計算部21が実行する自車位置算出処理(S100)について、図4のフローチャートを用いて説明する。
【0027】
この自車位置算出処理が開始されると、まずS101で、GPSセンサ11、方位センサ12及び距離センサ13から検出情報を入力する。
続いて、S102では、S101で入力した検出情報に基づき、車両の現在位置及び絶対方位(以下、これらを「自車位置情報」という。)と、時間tだけ前の状態を基準とした相対方位及び走行距離とを算出する。
【0028】
続いて、S103では、GPSセンサ11により検出された車両の現在位置の精度を表す予測誤差を算出し、算出した予測誤差の大きさに基づき現在位置の信頼度を判断する。本実施形態では、予測誤差が低い場合(例えばしきい値A1未満の場合)には信頼度を「高」、予測誤差が高い場合(例えばしきい値A2(>A1)以上の場合)には信頼度を「低」、予測誤差がしきい値A1以上A2未満の場合には信頼度を「中」とする。つまり、信頼度を3段階で評価するようにしている。ここで、予測誤差の算出方法としては種々の方法が考えられるが、本実施形態では、GPSセンサ11により電波が受信された人工衛星の数が多いほど予測誤差が小さくなるという評価方法で予測誤差を算出する。なお、マルチパスによる影響を考慮して予測誤差を算出するようにしてもよいし、人工衛星の配置に基づき予測誤差を算出するようにしてもよい(DOP:Dilution Of Precision)。また、カルマンフィルタ等のフィルタ処理によりセンサの誤差補正を行う場合には、その誤差補正に基づき予測誤差を算出してもよい。具体的には、センサの検出情報に含まれるノイズ等を収束させる学習ロジックが用いられている場合に、学習が進行しているほど(安定した検出情報が得られる状態であるほど)予測誤差を小さく算出するといった方法が考えられる。
【0029】
続いて、S104では、相対方位及び走行距離を走行軌跡メモリ22へ出力し、自車位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力し、さらに、信頼度を安全制御処理部24へ出力する。その後、自車位置算出処理を終了する。なお、走行軌跡メモリ22は、自車位置計算部21相対方位及び走行距離を入力すると、これらを走行軌跡データとして記憶(蓄積)する。
【0030】
次に、マップマッチング処理部23が実行する走行道路特定処理(S200)について、図5のフローチャートを用いて説明する。
この走行道路特定処理が開始されると、まずS201で、自車位置計算部21から入力した自車位置情報に基づいて初期位置を決定する。
【0031】
続いて、S202では、地図データベース14に記憶されている地図データの表す地図を基準として車両の現在位置を補正するマップマッチング処理を行う。具体的には、走行軌跡メモリ22に記憶されている走行軌跡データの表す走行軌跡と、地図データの表す道路パターンとを比較し、走行軌跡と最も相関の高い道路パターンを走行中の道路として判別して(パターンマッチング)、その道路パターンと整合するように車両の現在位置を補正する。
【0032】
続いて、S203では、車両が走行中の道路の識別情報である道路識別子(地図データに含まれるリンクの識別子)を地図データから取得する。
続いて、S204では、S203で取得した道路識別子と、マップマッチング処理による補正後の現在位置(以下「補正現在位置」という。)とを、安全制御処理部24へ出力する。その後、走行道路特定処理を終了する。
【0033】
次に、安全制御処理部24が実行する距離計測処理(S300)について、図6のフローチャートを用いて説明する。なお、安全制御処理部24は、この距離計測処理の開始時に時間管理部25から基準時刻を入力する。
【0034】
この距離計測処理が開始されると、まずS301で、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子と、地図データベース14に記憶されている地図データとに基づいて、車両前方の道路情報である前方道路情報(少なくとも道路形状が把握可能な情報)を地図データから取得する。
【0035】
続いて、S302では、S301で取得した前方道路情報に基づき、車両の前方にカーブが存在しているか否かを判定する。
そして、S302で、車両の前方にカーブが存在していると判定した場合には、S303へ移行し、レーザレーダ30からの検出情報に基づき、カーブの開始位置付近に存在する反射板までの距離(地物距離)を計測する。具体的には、まず、道路に存在する反射板の相対位置(車両からの距離及び方向)を計測する(図7参照)。カーブ路には複数の反射板が道路に沿って設置されているのが通常であるため、複数の反射板についての相対位置が計測され、こうして計測された複数の反射板の相対位置から前方の道路形状を推測することができる。そして、推測した道路形状に基づき、カーブの開始位置付近に存在する反射板を特定するのである。
【0036】
続いて、S304では、S301で取得した前方道路情報と、S303で計測した地物距離と、地物距離を計測した時刻(距離計測時刻)と、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置とを、ライト制御部40へ出力する。その後、距離計測処理を終了する。
【0037】
一方、S302で、車両の前方にカーブが存在していないと判定した場合には、S303,S304の処理を行うことなくそのまま距離計測処理を終了する。なお、車両の前方にカーブが存在していても、前照灯が点灯されていなければそのまま距離計測処理を終了するようにしてもよい。
【0038】
次に、第1実施形態のナビゲーション装置10により実行される処理の概要について、図8のタイムチャートを用いて説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出情報に基づき、自車位置情報(現在位置及び絶対方位)、相対方位及び走行距離を定期的に算出する。また、現在位置についてはその信頼度を判断する。そして、相対方位及び走行距離を走行軌跡メモリ22へ出力し、自車位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力し、さらに、信頼度を安全制御処理部24へ出力する。
【0039】
走行軌跡メモリ22は、自車位置計算部21から入力した相対方位及び走行距離を走行軌跡データとして記憶する。
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行い、車両の現在位置を補正するとともに地図データから道路識別子を取得する。そして、道路識別子及び補正現在位置を安全制御処理部24へ出力する。
【0040】
安全制御処理部24は、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子と、地図データベース14に記憶されている地図データとに基づいて、地図データから前方道路情報を取得する。そして、取得した前方道路情報に基づき、車両の前方にカーブが存在していると判定した場合には、レーザレーダ30からの検出情報に基づき、カーブの開始位置付近に存在する反射板までの距離(地物距離)を計測する。そして、前方道路情報と、地物距離と、距離計測時刻と、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置とを、ライト制御部40へ出力する。
【0041】
これにより、ライト制御部40では、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態が判断され、地物距離及び距離計測時刻に基づきライト制御のタイミングが補正された上で、ライト制御が行われる。
【0042】
以上説明した第1実施形態のナビゲーション装置10によれば、カーブの開始位置に存在する反射板までの距離(地物距離)を制御用情報としてライト制御部40へ出力することができる。このため、ライト制御部40においては、実際の道路における車両の位置を地図データのみから判断する構成に比べ、高精度のライト制御を実現することができる。
【0043】
また、ナビゲーション装置10は、現在位置の信頼度をライト制御部40へ出力するようにしているため、ライト制御部40においては、信頼度に応じた効果的なライト制御を実現することができる。
【0044】
さらに、ナビゲーション装置10は、距離計測時刻をライト制御部40へ出力するようにしているため、地物距離の検出からライト制御を実行するまでに要する時間(タイムラグ)を加味した高精度のライト制御を実現させることができる。
【0045】
なお、第1実施形態では、ライト制御部40が、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断するようにしているが、これに限定されるものではない。例えば、ライト制御部40が、地図データベース14から地図データを直接入力して前方道路のカーブ状態を判断するように構成することも可能である。
【0046】
また、第1実施形態のナビゲーション装置10では、GPSセンサ11が、本発明の位置検出手段に相当し、地図データベース14が、本発明の地図記憶手段に相当する。また、S103の処理を実行する制御部20が、本発明の信頼度判断手段に相当し、S301の処理を実行する制御部20が、本発明の状況取得手段に相当し、S303の処理を実行する制御部20が、本発明の距離計測手段に相当し、S304の処理を実行する制御部20が、本発明の情報出力手段に相当する。
【0047】
[第2実施形態]
次に、第2実施形態のナビゲーション装置10について説明する。
第2実施形態のナビゲーション装置10は、基本的な構成は第1実施形態のものと同一であるが、第1実施形態とは異なる機能を有するライト制御部40を対象として構成されており、出力する情報が異なる。具体的には、第2実施形態のナビゲーション装置10は、第1実施形態でライト制御部40へ出力した情報(前方道路情報、地物距離、距離計測時刻、信頼度及び補正現在位置)に加え、自車位置情報及び道路識別子をライト制御部40へ出力する。以下、具体的に説明するが、説明の重複を避けるため、第1実施形態と共通の構成については同一符号を付して説明を省略している。
【0048】
第2実施形態のナビゲーション装置10が対象とするライト制御部40は、ナビゲーション装置10の制御部20から入力した自車位置情報を軌跡情報として記憶(蓄積)する。具体的には、制御部20から自車位置情報を、その自車位置情報とともに入力した信頼度及び道路識別子と関連付けて記憶する。このように自車位置情報を記憶していくことで、自車位置情報の軌跡による局所的な道路情報が作成されることになる。この道路情報は、自車位置情報の信頼度が高い場合や、地図データの表す道路の精度が低い場合には、地図データよりも精度の高いものとなる。なお、同一の道路に関する軌跡情報が既に記憶されている場合には、情報を更新しないようにしてもよく、逆に、常に更新するようにしてもよい。また、既に記憶されている自車位置情報の信頼度に比べ新たに入力した自車位置情報の信頼度の方が大きい場合にのみ情報を更新してもよい。さらに、信頼度のレベルが同じの場合には、既に記憶されている自車位置情報との平均値をとってその平均値に更新するようにしてもよい。
【0049】
そして、ライト制御部40は、軌跡情報が記憶されていない場所においてライト制御を行う場合には、第1実施形態と同様、制御部20から入力した前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断する。つまり、地図データに基づき道路形状を判断する。一方、軌跡情報が既に記憶されている場所(制御部20から入力した道路識別子と軌跡情報として記憶されている道路識別子とが一致する場所)においてライト制御を行う場合には、その軌跡情報及び自車位置情報に基づいて前方道路のカーブ状態を判断する。なお、軌跡情報が既に記憶されている場所においても、軌跡情報の信頼度が低い場合や、地図データの表す道路の精度が高いと判断される場所(例えば都市部)の場合には、前方道路情報及び補正現在位置に基づいて前方道路のカーブ状態を判断するようにしてもよい。
【0050】
このようなライト制御部40を対象としていることから、第2実施形態のナビゲーション装置10において、制御部20は、自車位置情報及び道路識別子をライト制御部40へ出力する。具体的には、距離計測処理(図6)のS304において、前方道路情報、地物距離、距離計測時刻、自車位置計算部21から入力した信頼度と、マップマッチング処理部23から入力した補正現在位置に加え、自車位置計算部21から入力した自車位置情報と、マップマッチング処理部23から入力した道路識別子とを、ライト制御部40へ出力する。
【0051】
以上説明した第2実施形態のナビゲーション装置10によれば、第1実施形態と同様の効果を得ることができる。特に、第2実施形態のナビゲーション装置10は、自車位置情報をライト制御部40へ出力するようにしているため、ライト制御部40においては、自車位置情報から作成した軌跡情報に基づく高精度のライト制御を実現することができる。
【0052】
なお、既に走行したことのある道路においては、前方道路情報や補正現在位置を制御部20からライト制御部40へ出力しないようにしてもよい。また、既に走行したことのある道路においては、マップマッチング処理自体を行わない構成とすることも可能である。
【0053】
以上、本発明の一実施形態について説明したが、本発明は、種々の形態を採り得ることは言うまでもない。
例えば、上記実施形態のナビゲーション装置10では、道路に沿って設置されている複数の反射板のうち、カーブの開始位置付近に存在する反射板までの距離を地物距離としてライト制御部40へ出力するようにしているが、これに限定されるものではない。すなわち、検出されたすべての反射板についての距離及び方向(相対位置)をライト制御部40へ出力し、ライト制御部40において、複数の反射板についての情報に基づき道路形状やカーブ開始位置を判断するように構成することも可能である。なお、地物までの距離そのものではなく、例えば複数の距離の平均値を出力するようにしてもよい。
【0054】
また、上記実施形態では、ライト制御部40が、制御部20から入力した信頼度に応じた車両制御として、前照灯の調整量を変更する構成を例示しているが、信頼度に応じた車両制御としては種々の制御が考えられる。例えば、信頼度が高い場合には左右の前照灯を調整し、信頼度に応じて片方の前照灯のみを調整するといった構成が可能である。また、信頼度に応じて実行可能な車両制御の項目を変更するようにしてもよい。例えば、信頼度が高い場合には、前照灯の制御に加え、道路情報に応じた制動力の制御を行い、信頼度が中程度の場合には前照灯の制御のみを行い、信頼度が低い場合には道路情報に応じた車両制御を行わないように構成することも可能である。
【0055】
一方、上記実施形態では、車両制御としてライト制御を行うライト制御部40に対し、道路に存在する検出対象の地物(反射板)までの距離等の情報を出力する構成のナビゲーション装置10を例示したが、これに限定されるものではなく、その他の車両制御を行う車両制御部へ各種情報を出力するように構成してもよい。ここで、その他の車両制御としては、例えば次のような車両制御が挙げられる。
【0056】
(1)踏切侵入時の車両制御(減速制御、運転席側サイドガラス開制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、遮断機を検出対象の地物とし、遮断機までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、踏切までの距離を正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0057】
(2)また、トンネル侵入時の車両制御(前照灯点灯制御、窓閉制御、エアコン内気切替制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、トンネル入り口に設置されている看板を検出対象の地物とし、看板までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、トンネルに侵入したタイミングを正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0058】
(3)また、交差点侵入時の車両制御(ウインカ制御、音声案内制御等)を行う車両制御部が考えられる。この場合、ナビゲーション装置10は、例えば、交差点に設置された信号機を検出対象の地物とし、信号機までの距離を計測して車両制御部へ出力する。これにより、車両制御部においては、交差点までの距離を正確に把握することが可能となり、高精度の車両制御を実現することができる。
【0059】
また、上記実施形態のナビゲーション装置10では、検出対象の地物を反射板のみとしているが、これに限定されるものではなく、例えば上記(1)〜(3)のような地物についても検出対象としてもよい。具体的には、距離計測処理(図6)のS302において、前方道路情報に基づき、車両の前方にカーブ、踏切、トンネル又は交差点が存在しているか否かを判定する。そして、カーブが存在していると判定した場合には検出対象の地物を反射板に特定し、同様に、踏切の場合には遮断機に、トンネルの場合には看板に、交差点の場合には信号機に、検出対象の地物を特定する。そして、特定した対象地物までの距離を地物距離として計測する。つまり、前方道路情報に応じて検出対象とする地物の種類を変化させるのである。このようにすれば、ナビゲーション装置10からの情報を複数種類の車両制御に利用することができる。
【0060】
また、上記実施形態のナビゲーション装置10では、検出対象の地物をレーザレーダ30により検出するようにしているが、これに限定されるものではない。すなわち、検出対象の地物を検出する手段としては、レーザレーダの他、例えば、ミリ波レーダ、カメラ、赤外線センサ等を用いることが可能である。また、こうした手段を組み合わせて用いることにより検出精度の向上を図ることも可能である。
【0061】
さらに、上記実施形態では、時刻に関する情報として、地物距離を計測した時刻のみをライト制御部40へ出力しているが、これに限定されるものではなく、例えば、車両の現在位置や絶対方位等を検出した時刻や、道路識別子を判定した時刻などについてもライト制御部40へ出力するようにしてもよい。このようにすることで、ライト制御部40においては、地物距離の補正をより高精度に行うことが可能となる。
【0062】
また、時刻をそのまま出力するのではなく、時刻に車両の速度を乗じて距離の形に変換した上で出力するようにしてもよい。具体的には、ナビゲーション装置10が車速センサ50からの検出情報を入力し、ライト制御部40へ出力すべき情報についての時刻(その情報を検出、判定等した時刻)と現在時刻との差に車速を乗ずることで、検出、判定等した時刻から現時点までの車両の走行距離を算出する。そして、その算出した走行距離(又は、算出した走行距離を地物距離から差し引いた距離(補正後の地物距離))を、時刻に替えてライト制御部40へ出力するのである。このようにすれば、ライト制御部40における車速センサ50の検出情報の入力を不要とすることも可能となる。
【0063】
なお、時刻に関する情報や信頼度をライト制御部40へ出力しないように構成することも可能である。
また、上記実施形態では、ナビゲーション装置10からライト制御部40へ情報を提供するシステムを例示したが、これに限定されるものではなく、これらを一体とした装置として構成してもよい。また、本発明が適用される装置はナビゲーション装置に限定されない。
【図面の簡単な説明】
【0064】
【図1】第1実施形態のナビゲーション装置の概略構成を示すブロック図である。
【図2】ライト制御の説明図である。
【図3】道路情報検出処理のフローチャートである。
【図4】自車位置算出処理のフローチャートである。
【図5】走行道路特定処理のフローチャートである。
【図6】距離計測処理のフローチャートである。
【図7】地物距離計測の説明図である。
【図8】ナビゲーション装置により実行される処理のタイムチャートである。
【符号の説明】
【0065】
10…ナビゲーション装置、11…GPSセンサ、12…方位センサ、13…距離センサ、14…地図データベース、20…制御部、21…自車位置計算部、22…走行軌跡メモリ、23…マップマッチング処理部、24…安全制御処理部、25…時間管理部、30…レーザレーダ、40…ライト制御部、50…車速センサ
【特許請求の範囲】
【請求項1】
車両に搭載されて用いられる道路情報検出装置であって、
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図記憶手段と、
前記位置検出手段により検出された現在位置に基づき、前記地図記憶手段により記憶されている地図データから前記車両の前方の道路情報を取得する状況取得手段と、
前記状況取得手段により取得された道路情報が特定の道路情報である場合に、道路に存在する検出対象の地物までの距離を計測する距離計測手段と、
前記距離計測手段により計測された距離を前記車両の制御用情報として出力する情報出力手段と、
を備えたことを特徴とする道路情報検出装置。
【請求項2】
前記位置検出手段により検出された現在位置の信頼度を判断する信頼度判断手段を備え、
前記情報出力手段は、前記信頼度判断手段により判断された信頼度についても前記制御用情報として出力すること
を特徴とする請求項1に記載の道路情報検出装置。
【請求項3】
前記情報出力手段は、前記距離計測手段により前記距離が計測された時刻についても前記制御用情報として出力すること
を特徴とする請求項1又は請求項2に記載の道路情報検出装置。
【請求項4】
前記距離計測手段は、前記状況取得手段により取得された道路情報に応じて検出対象とする地物の種類を変化させること
を特徴とする請求項1から請求項3までのいずれか1項に記載の道路情報検出装置。
【請求項5】
請求項1から請求項4までのいずれか1項に記載の道路情報検出装置における状況取得手段、距離計測手段及び情報出力手段としてコンピュータを機能させるためのプログラム。
【請求項1】
車両に搭載されて用いられる道路情報検出装置であって、
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図記憶手段と、
前記位置検出手段により検出された現在位置に基づき、前記地図記憶手段により記憶されている地図データから前記車両の前方の道路情報を取得する状況取得手段と、
前記状況取得手段により取得された道路情報が特定の道路情報である場合に、道路に存在する検出対象の地物までの距離を計測する距離計測手段と、
前記距離計測手段により計測された距離を前記車両の制御用情報として出力する情報出力手段と、
を備えたことを特徴とする道路情報検出装置。
【請求項2】
前記位置検出手段により検出された現在位置の信頼度を判断する信頼度判断手段を備え、
前記情報出力手段は、前記信頼度判断手段により判断された信頼度についても前記制御用情報として出力すること
を特徴とする請求項1に記載の道路情報検出装置。
【請求項3】
前記情報出力手段は、前記距離計測手段により前記距離が計測された時刻についても前記制御用情報として出力すること
を特徴とする請求項1又は請求項2に記載の道路情報検出装置。
【請求項4】
前記距離計測手段は、前記状況取得手段により取得された道路情報に応じて検出対象とする地物の種類を変化させること
を特徴とする請求項1から請求項3までのいずれか1項に記載の道路情報検出装置。
【請求項5】
請求項1から請求項4までのいずれか1項に記載の道路情報検出装置における状況取得手段、距離計測手段及び情報出力手段としてコンピュータを機能させるためのプログラム。
【図1】


【図3】
【図4】
【図5】
【図6】

【図8】
【図2】
【図7】

【図3】
【図4】
【図5】
【図6】
【図8】
【図2】
【図7】
【公開番号】特開2007−290505(P2007−290505A)
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−119713(P2006−119713)
【出願日】平成18年4月24日(2006.4.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成18年4月24日(2006.4.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]