
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
321 - 340 / 463
ナビゲーション装置、その制御方法及びプログラム

【課題】踏切の手前にカーブが存在するかを判定し、カーブが存在したときのみ、手前で踏切が存在する旨を警告する。
【解決手段】踏切検出手段11が、自車の進行方向又は経路上に存在する踏切を検出し(踏切検出処理)、検出した前記踏切の手前に所定角度以上のカーブが存在するかをカーブ判定手段12が判定し、これでカーブが存在すると判定した場合に、警告手段13が、カーブの先に前記踏切が存在する旨を警告する。このように、手前にカーブがある場合に限って踏切がある旨を警告することにより、そのカーブまでに十分減速するなどの対処が容易になり、踏切事故が防止でき運転の安全が効果的に改善可能となる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム

【課題】再探索後の経路情報をユーザに提示することができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】再探索後の経路をユーザに提示すると共に、再探索によって設定された目的地までの案内経路に従って、ナビゲーションするナビゲーション装置であって、少なくともルートの再探索後の経路情報を含む再探索情報を記録するリルート情報記録部と、リルート情報記録部に記録された再探索情報を解析し、再探索後の経路の解析結果を取得するリルート解析部と、リルート解析部が取得した再探索後の経路情報をユーザに提示する提示部とを備える。
(もっと読む)
車両運転支援システム及び車両運転支援装置並びに車載機
【課題】車両が交差点において進行方向を変化させる場合に、誤って反対車線に進入することを防止できる車両運転支援システムを提供する。
【解決手段】路上機19を走行車線が複数ある交差点に設置して各車線に車両が存在するか否かを検知させ、ナビゲーション装置1は、自車両27が交差点に到達したと判断し、且つ、当該車両27がその交差点で右左折しようとする場合は、進入先となる道路の反対車線側におけるセンターラインよりの車線に他車両が存在するか否かを路上機19より取得し、他車両が検知されていない場合は反対車線への進入を回避させるための警告を運転者に対して行う。
(もっと読む)
車両の走行制御装置
【課題】高速道路等の本線車道から離脱した場合に、ACCによる不要な加速を防ぐことができる車両の走行制御装置の提供。
【解決手段】ACC制御部10と、自車両の方向指示器5の指示方向を検出する方向指示検出部と12、ACC制御部10の作動中、方向指示器5指示方向に応じて、ACC制御部10による加速を制限する加速制限部11とを備え、加速制限部11は、方向指示検出手段12が左ウインカを検出した場合に加速を制限し、且つ、方向指示検出手段12が右ウインカを検出した場合には加速を制限しない。
(もっと読む)
対象物認識装置
【課題】本発明は、対象物認識装置に係り、認識範囲においてその認識を行うのに道路上での状態が良好であるとする対象物を認識できなかったときは、その認識範囲においてその対象物が道路上に存在していなかったと判定することにある。
【解決手段】測位された自車両の位置と、地図データベースに格納されている自車両の認識すべき道路上の対象物の位置と、自車両位置の測位精度とに基づいて設定される道路の認識範囲において対象物を認識する処理を実行する。地図データベースに対象物の道路上での標示かすれを示す情報を格納する。そして、設定認識範囲内において対象物が認識されなかった場合において、地図データベースによるその対象物の標示かすれがその対象物を認識するうえで良好なものであるときは、その設定認識範囲にその対象物は存在しなかったと判定する。
(もっと読む)
車両内のナイトビューシステムを動作させる方法および対応するナイトビューシステム
【課題】車両内のナイトビューシステムを動作させる方法、および対応するナイトビューシステムを提供すること。
【解決手段】車両内のナイトビューシステムを動作させる方法であって、ナイトビューセンサ(12)を用いることにより、該車両の周囲のビデオ画像を提供することと、該車両が移動する道路(5)のコースに関する情報をナビゲーションデバイス(15)から取り出すことと、該ナビゲーションデバイス(15)から取り出された該情報を考慮に入れて、該ビデオ画像を処理することにより、該道路(5)の該コースを検出し、該ビデオ画像と該道路(5)の該検出されたコースとをディスプレイデバイス(20)上に表示することとを特徴とする、方法。
(もっと読む)
運転支援システム
【課題】ユーザ利便性を向上させた運転支援システムを提供すること。
【解決手段】車両に搭載され、自車両運転者に地図上の所定の地点までの走行経路を案内する経路案内装置を備えた運転支援システムに、自車両前方の自車両が通行できない通行不可地点を検出する検出手段を備え、経路案内装置が、通行不可地点が検出されたとき、自車両運転者に所定の地点までの経路を案内中でなければ、自車両進行方向において通行不可地点より先にある所定の位置(例えば最初の交差点)を目的地とした、通行不可地点を通らない経路を検索する。
(もっと読む)
進行方向変更支援システム及び車々間通信システム
【課題】 ドライバーの運転操作の集中力低下を抑制することのできる進行方向変更支援システムを提供する。
【解決手段】 進行方向変更支援システムは、交差点において右折、左折及び直進のいずれかに進行する自車両に関わる他車両との衝突の危険性に関する情報を示す危険度情報を求める危険度判定部と、危険度情報を走行ルートに関する情報に付加する情報提供内容決定部と、走行ルートに関する情報と危険度情報とをドライバーに提供する画像表示部及び音声通知部とを備える。
(もっと読む)
運転支援装置及び方法
【課題】適切に運転支援制御することが可能な運転支援装置および方法を提供する。
【解決手段】運転支援装置1は、判断部22が運転支援制御を実行すべきかを判断する。提示部70は、判断部22により運転支援制御を実行すべきと判断された場合、運転支援制御部21に意思入力すべきと提示する。このため、運転者は、運転支援制御を実行すべきタイミングを知ることができる。これにより、運転支援制御を実行した方が良い場合において、同制御がオンされずに有効に制御が行われない事態を防止することができる。従って、適切に運転支援制御することができる。
(もっと読む)
ナビゲーション装置において使用するための改善された地図データを生成する方法
ナビゲーション装置上で地図変更を作成する方法を説明する。方法は、地図を装置上にロードするステップと、可能な変更のメニュー駆動選択を提供するステップと、それら変更のうち少なくとも1つを含む入力を受信するステップと、それら変更のうち少なくとも1つを含む地図訂正を生成するステップとを含む。 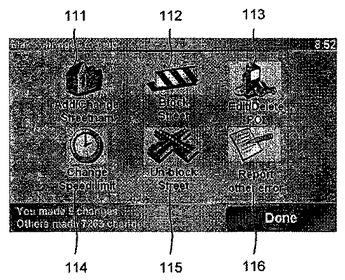 (もっと読む)
(もっと読む)
車両の運転支援制御装置および方法
【課題】カメラ等を用いた前方認識装置2の出力情報に基く運転支援を、前方の道路形状により見通しが悪くても、安全に実行できる車両の運転支援装置を実現すること。
【解決手段】ナビゲーション装置1と、車両周辺の状況を撮影し特定の対象物までの距離と相対速度を算出できるカメラ等を用いた前方認識装置2と、車両走行状態を取得する車両に搭載されているセンサ群とを備え、前記ナビ装置1または前記カメラ等を用いた前方認識装置2から得られた走行環境情報によって、前記カメラ等を用いた前方認識装置の出力情報を基にした運転支援制御を継続するか中断するかを判定する。もし、それらセンサ群の情報により視認性が悪いと判断した場合は前記前方認識装置の出力情報を基にした運転支援制御を中断する。
(もっと読む)
ナビゲーション装置において使用するための改善された地図データを生成する方法
エンドユーザは、地図誤りに対する訂正を直接装置上に入力できる。装置は、訂正の外部処理なしで訂正を使用できる。従って、エンドユーザは、単にウェブリンクを介して誤りを地図メーカに報告して、その地図メーカが誤りを検証し、地図を更新し且つ更新データをエンドユーザに供給することを待つ必要がない。それが完了するのにかかる周期は、数ヶ月及び時には数年である。ナビゲーション装置は、訂正を迅速に使用できる。エンドユーザは、他のエンドユーザと訂正を共有でき、また訂正を集約し、検査し且つ配信する共有リモートサーバとも訂正を共有できる。 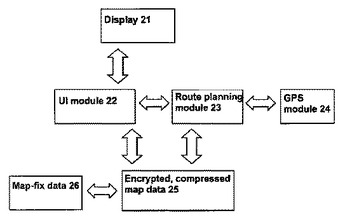 (もっと読む)
(もっと読む)
ナビゲーション装置において使用するための改善された地図データを生成する方法
エンドユーザは、地図誤りに対する訂正を直接装置上に入力できる。装置は、訂正の外部処理なしで訂正を使用できる。従って、エンドユーザは、単にウェブリンクを介して誤りを地図メーカに報告して、その地図メーカが誤りを検証し、地図を更新し且つ更新データをエンドユーザに供給することを待つ必要がない。それが完了するのにかかる周期は、数ヶ月及び時には数年である。ナビゲーション装置は、訂正を迅速に使用できる。エンドユーザは、他のエンドユーザと訂正を共有でき、また訂正を集約し、検査し且つ配信する共有リモートサーバとも訂正を共有できる。 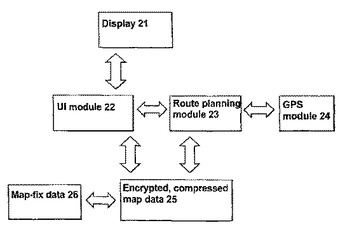 (もっと読む)
(もっと読む)
データ構造及びそれを利用したナビゲーションシステム
【課題】ナビゲーションシステムにかかる負荷を小さくすることで、認識対象地物を検出したときに、認識対象地物から制御対象地物までの距離を、迅速に出力できるデータ構造を提供する。
【解決手段】制御対象地物の座標データと、認識対象地物を認識すべき制御対象道路を規定する制御対象道路データと、制御対象道路内に存在する認識対象地物を認識するための認識対象地物データと、制御対象地物から認識対象地物まで距離を規定する距離データと、を備え、座標データ、制御対象道路データ、認識対象地物データ、及び距離データが制御対象地物毎に関連付けられている。
(もっと読む)
車線維持支援装置
【課題】運転者に応じて最適な走行ラインを設定すること。
【解決手段】車線維持支援装置10は、車両が走行する道路上の走行車線を認識する走行車線認識手段1aと、走行車線認識手段1aにより認識された走行車線に基づいて、走行車線内において目標となる目標走行ラインL1、L2を設定する走行ライン設定手段1bと、走行ライン設定手段1bにより設定された目標走行ラインL1、L2に基づいて、車両の操舵を制御する操舵制御手段2と、車両の運転者の視線方向P1、P2、P3を検出する視線検出手段1cを備えている。走行ライン設定手段1bは、視線検出手段1cにより検出された運転者の視線方向P1、P2、P3に基づいて、目標走行ラインL1、L2を設定する。
(もっと読む)
車両用経路案内装置
【課題】計算された所望の燃料消費量に対応して走行することができる車両用経路案内装置を提供する。
【解決手段】本発明による車両用経路案内装置1は、目的地に至る経路を探索する探索手段2aと、探索された経路を表示する表示手段2bとを備える車両用経路案内装置であって、探索された経路に基づいて車速パターンを計算する車速パターン計算手段2cと、車速パターンに基づいて経路の燃料消費量を計算する燃料消費量計算手段2eとを備えるとともに、表示手段2bが燃料消費量と車速パターンを表示することを特徴とする。
(もっと読む)
運転支援装置及び車両用ナビゲーション装置
【課題】車両が一方通行路を逆走してしまった場合に、最適な退出方法をドライバに案内する運転支援装置を提供する。
【解決手段】車両用ナビゲーション装置1の制御回路2は、車両が一方通行路に対して逆方向から進入したことを検出すると、その一方通行路からの最適な退出方法を地図データ入力器4の道路地図に基づき検索し、その退出方法を表示装置7やスピーカ8を介してドライバに案内する。
(もっと読む)
情報提供車両及び運転支援装置
【課題】運転者の生体情報に基づく情報に基づいて、より適切な支援を行うこと。
【解決手段】運転者が走行中に危険を感じた場合、その緊張感から生体情報は変化する。そこでプローブカーは、運転者が危険と感じた地域を、運転者の生体情報の変化に基づいて特定する。そして、特定された危険地域に関する情報をプローブ情報センタへ送信する。プローブ情報センタでは、プローブカーから送信された危険地域に関する情報を収集し、危険地域マップを生成する。運転者が運転支援を希望した場合、車両に搭載された運転支援装置は、運転支援に必要な範囲に対応する危険地域マップをプローブ情報センタから取得する。運転支援装置は、プローブ情報センタから提供された危険地域マップに基づいて、経路上に存在する危険地域を検出する。運転支援装置は、検出された危険地域の存在を運転者に通知することによって運転支援を行う。
(もっと読む)
ナビゲーション装置
【課題】信号機の無い交差点や横断歩道での運転者の安全確認を支援することが可能なナビゲーション装置を提供する。
【解決手段】信号機の無い交差点で自車両2が走行している道路と交差する道路との優先度の判定ができない場合には、CPU41は、この交差点で安全確認のために停止又は所定速度以下に減速した際に、この交差点に関する「停止情報」を取得する。また同時に、CPU41は、ドライバカメラ52を介して運転者が左右確認を行う際の顔の動きを検出して、この交差点に関する「顔向き情報」を取得する(S111〜S113)。続いて、CPU41は、該交差点に関する所定期間の「停止情報」と「顔向き情報」を読み出し、この交差点での停止頻度又は左右確認を行う頻度が高い場合には、該信号機の無い交差点の情報を交差点情報23に格納する(S114〜S116)。
(もっと読む)
制御用情報記憶装置及びプログラム
【課題】車両制御を実行するタイミングの精度を向上させる。
【解決手段】ナビゲーション装置は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部へ出力する。これにより、車両制御部においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、車両が制御開始点や制御終了点を通過した通過タイミングを車両制御部へ出力することにより、車両制御のタイミングの精度を高めることができる。
(もっと読む)
321 - 340 / 463
[ Back to top ]