
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
281 - 300 / 463
位置特定装置、位置特定方法および位置特定プログラム
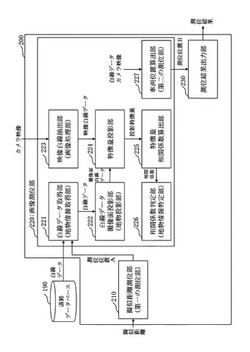
【課題】車両位置を高精度に算出することを目的とする。
【解決手段】擬似距離測位部210は擬似距離測位により測位位置Aを得る。白線データ取得部221は測位位置Aの周辺に位置する各白線の三次元座標データを取得する。白線データ撮像面投影部222は各白線データをカメラ撮像面に投影する。映像白線抽出部223はカメラ映像から白線を抽出する。特徴量投影部224は各撮像面白線データと映像白線データとの特徴量を算出し、特徴量相関係数算出部225は各撮像面白線データを映像白線データと比較し、相関係数判定部226は映像白線データに対応する撮像面白線データを特定する。車両位置算出部227は、カメラ映像における当該白線の二次元位置に当該白線データが示す三次元座標を当てはめ、焦点距離や画角や設置角などのカメラの特性に基づいて、車両位置を算出する。
(もっと読む)
車載用ナビゲーション装置

【課題】周辺環境に変化があった場合でもユーザにとって認識しやすい最適なルート案内を行うことができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車載用ナビゲーション装置において、撮像手段により取得された画像にルート案内表示を重ね合わせて合成した実写画像を表示手段の画面に表示させている状態で、該画面上でのルート案内表示を見え難くする要因(S1,S2,S3,S4,S6)が発生していると判定したときに、地図データ及びナビゲーション機能に基づいて生成したバーチャル画像による案内画面に切り替える(S7)。
(もっと読む)
ナビゲーション装置
【課題】自車の走行する車線が特定できない場合であっても、自車が推奨車線を走行していないと判定できた場合には、自車をその推奨車線へ誘導するナビゲーション装置を提供すること。
【解決手段】目的地までのルートを案内するナビゲーション装置100は、ルートを案内する際に推奨する推奨車線を決定する推奨車線決定手段11と、自車Vが走行する車線を特定することなく自車Vが推奨車線を走行しているか否かを判定する推奨車線走行判定手段12と、推奨車線走行判定手段12により自車Vが推奨車線を走行していないと判定された場合に自車Vを推奨車線へ誘導する車線誘導手段13と、を備える。
(もっと読む)
車両用ナビゲーション装置
【課題】気象情報の有無によらずトンネル出口付近の運転注意情報を出力することができる車両用ナビゲーション装置を提供する。
【解決手段】車両の周囲にトンネルが存在する場合、トンネルを含む地域の気象情報の取得状況を確認し、車両がトンネルの入口手前の予め定められた範囲に到達した際に、当該取得状況が反映された予告情報を出力し、車両がトンネルの出口手前の予め定められた範囲に到達した際に、気象情報が取得されている場合は当該気象情報を反映した気象反映運転注意情報を、気象情報が取得されていない場合は気象情報と無関係に用意された定型運転注意情報を、トンネル出口において出力すべき運転注意情報として出力することを特徴とする車両用ナビゲーション装置として提供可能である。
(もっと読む)
データベース作成装置、及びデータベース作成プログラム
【課題】ヒヤリ・ハットイベントの状況を容易に把握すること。
【解決手段】プローブカーは、運転者の生体情報の変化情報などから運転者の危険反応を検出し、運転者が危険反応を示したイベントに関する情報をヒヤリ・ハット情報としてデータセンタへ送信する。データセンタでは、プローブカーから集められたヒヤリ・ハット情報を、位置情報および時刻情報に基づいて、イベント単位の関連する情報グループに振り分ける。データセンタは、同一の情報グループにまとめられた情報の内容を解析し、ヒヤリ・ハットイベントの原因車両を特定する。データセンタでは、特定した原因車両の情報や、ヒヤリ・ハットイベントに関連する車両の画像情報などに基づいて、ヒヤリ・ハットイベントの再現動画を作成する。データセンタにアクセスすることにより、端末装置においてヒヤリ・ハットイベントの再現動画を閲覧することができる。
(もっと読む)
覚醒度判定装置及び覚醒度判定方法
【課題】 運転者の覚醒度の判定精度を向上することができる覚醒度判定装置及び覚醒度判定方法を提供する。
【解決手段】 覚醒度判定装置1は、運転者情報認識手段10、環境情報認識手段20、車両情報認識手段30、覚醒度判定ECU40を備えている。覚醒度判定ECU40には、ふらつき検知部41、要因特定部42、及び覚醒度判定部43が機能的に構築されている。ふらつき検知部41では、白線認識センサ21から入力される白線情報などに基づいて自車両のふらつき状態が検知される。要因特定部42では、運転者情報認識手段10、環境情報認識手段20や車両情報認識手段30を構成する各種センサからの検出結果に基づいて、車両ふらつきの発生要因が特定される。覚醒度判定部43では、ふらつき発生要因毎のふらつき発生率に該発生要因毎に設定されている重み係数が乗算されて得られる演算結果に基づいて、運転者の覚醒度が判定される。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
白線認識装置及び方法
【課題】車線維持支援システム等に用いられる白線認識装置において、白線の幅が通常とは異なる場所においても、正確に白線を認識する。
【解決手段】白線認識装置は、車両が走行する走行路の画像を撮像する撮像手段(110)と、撮像された画像に基づいて、走行路における白線の幅に対応するものとして設定されている閾値との比較により、白線を認識する画像処理手段(120)と、走行路に関する所定種類の情報を取得する情報取得手段(130)と、取得された情報の内容に応じて、設定されている閾値を変更する閾値変更手段(150)とを備える。
(もっと読む)
ナビゲーション装置
【課題】オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能なナビゲーション装置を得ることにある。
【解決手段】自車位置決定手段と案内ルート探索手段とを備えたナビゲーション装置であって、案内ルートRoに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段と、障害事情が存在すると判定された場合に、目的地までの新たな案内ルートRnを探索するオフルート予備対策手段と、障害事情判定を行う障害事情判定位置Eを決定する障害事情判定位置決定手段と、を備え、障害事情判定位置決定手段は、自車位置より走行前進側にある案内ルートRoにおける最初の進路変更地点Cから障害事情判定位置Eまでの距離Yを、周囲走行体情報あるいは自車走行情報の何れか一種以上に基づいて可変決定し、障害事情判定手段は、障害事情判定位置Eにおいて障害事情判定を行う。
(もっと読む)
車両用方向指示器の適正操作判断装置
【課題】 運転者による方向指示器の操作が不適正であった場合に車両の右/左折後に注意を促すことにより、運転者が方向指示器の適正な操作を身につけて交通マナーと安全意識の向上を図ることができる車両用方向指示器の適正操作判断装置の提供。
【解決手段】 車両の右/左折後に方向指示器の操作の不適正/適正を判定し、不適正と判定した場合には運転者に注意を促すようにした。
(もっと読む)
制御用情報記憶装置及びプログラム
【課題】車両走行時に車両から得られる情報であって、車両の走行制御のために用いられる制御用情報を記憶する場合に、記憶量を低減させながら有用な情報記憶を維持させる。
【解決手段】車速をセグメント単位で取得してデータベースへ記憶させるが、同じセグメントを複数回走行した場合には、その複数回の平均値(平均車速)を記憶させる。そしてさらに、所定の条件を満たす場合には(図3のS104:NO,S105:YES)、その隣接セグメントに対応する学習データ値(車速)が所定の閾値よりも小さければ(S106:YES)、データ結合を行う(S107)ようにしている。そのため、データベース23bの情報量が削減される。交差点に接続するセグメントの場合(S104:YES)及び走行回数が所定の閾値以下の場合(S105:NO)は、むしろ結合しない方が妥当であるため、学習データ値の結合対象としない。
(もっと読む)
ナビゲーション装置、その制御方法及びプログラム
【課題】車両情報のハンドル操舵角と、ナビゲーション装置のジャイロセンサで検出する車両回転角とを比較し、両者が一定の関係を外れたときに警告することにより、従来技術では検出できなかった路面凍結によるスリップなどの異常状態に対処し安全性を改善可能とする。
【解決手段】角度取得手段23が、車両コンピュータ13からハンドルの操舵角を取得するとともに、ジャイロセンサ21により車両の回転角を取得する。そして、それらハンドルの操舵角とジャイロセンサの回転角を、比較検出手段30が比較し、両者が所定の関係を外れたことを矛盾として検出すると、警告出力手段31が、画面表示や音などで警告を出力する。
(もっと読む)
車両用経路案内装置
【課題】右左折判定を早期且つ確実に行う車両用経路案内装置を提供すること。
【解決手段】車両に搭載され、運転者に経路を案内する車両用経路案内装置が、自車両外の情景を撮像する撮像手段と、この撮像手段により撮像された画像から自車両が右左折したか否かを推定する第一の推定手段と、自車両の車両挙動状態から自車両が右左折したか否かを推定する第二の推定手段と、自車両運転者の操作状態から自車両が右左折したか否かを推定する第三の推定手段と、第一の推定手段による推定結果、第二の推定手段による推定結果、及び、第三の推定手段による推定結果に基づいて、自車両が右左折したと判定するタイミングを変更する変更手段とを備える。
(もっと読む)
車両運転支援システム
【課題】踏み切りの手前で車両を確実に減速して一時停止させ、安全に発進させることができる車両運転支援システム10を提供する。
【解決手段】 TVカメラ15を有し、車両の進行方向の道路状況を撮像した画像データを検出する画像検出手段11と、画像データに基づいて車両の進行方向に特定の対象物を検出する画像解析手段12と、画像解析手段12が車両の進行方向に踏み切りを検出すると、踏み切りに接近していることを運転者に通知し、車両の減速および一時停止を促す出力手段13と、車両の減速量に応じて、車両の減速および一時停止をアシストする車両制御手段14と、を具備する。更に、車載カーナビケーションシステム41を備え、車載カーナビケーションシステム41と画像解析手段12の検出結果を比較し、比較結果に応じて車両制御手段14を制御する。実際の道路状況を勘案しながら、ナビモードで走行できる。
(もっと読む)
道路形状算出装置及び車両センサ補正装置
【課題】車両の走行環境や走行状態に関わらず最適に道路形状を算出することが可能な道路形状算出装置を提供する。
【解決手段】道路の形状(θ)を算出する道路形状算出装置であって、車両の前後方向に働く実際の前後加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値との間の第1関係式と、前記車両の横方向に働く実際の横加速度と前記車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第2関係式と、前記車両の前後方向に働く実際の前後加速度及び前記車両の横方向に働く実際の横加速度と前記車両の前後方向に働く加速度を検出する前後加速度検出手段の検出値及び車両の横方向に働く加速度を検出する横加速度検出手段の検出値との間の第3関係式とから導かれる前記道路の形状(θ)に相当する加速度を算出するアルゴリズムに基づいて、前記道路の形状(θ)を算出する(S104)。
(もっと読む)
車載用ナビゲーションシステム
【課題】現在位置および経路上の標高情報や傾斜情報を通知する際に、そのときの気象条件や車両の状態を加味して運転操作上の注意喚起を行なうことにより、より安全で快適な運転を支援する。
【解決手段】車載用ナビゲーションシステムは、道路リンク上におるノード毎の標高情報を含む地図情報が記憶された記憶部4と、記憶部4に記憶された地図情報を表示する表示部2と、自車両の現在位置を検出する現在位置検出部5と、現在位置検出部5により検出される現在位置、もしくは地図情報の標高情報から道路の傾斜度を算出する道路傾斜算出部7と、道路傾斜算出部7で算出された道路の傾斜と、現在位置における標高情報とを表示部2に数値表示する制御部1と、により構成される。
(もっと読む)
車両の走行制御装置
【課題】実際の車両の運転を考慮して確実に自動運転可能で既存の走行制御ルートから自然に移行できる走行制御ルートをドライバが任意に編集でき汎用性を大きく向上する。
【解決手段】走行制御ルートを編集する際に実行される編集モードでは、選択したルートAとルートBとが交差していない場合、ルートAからルートBにかけて最接近するノード近傍に接線を追加し、追加ルートCとして設定する。追加ルートCの速度はルートAとルートBの最接近するノード同士の速度の平均を求め取得する。また、ルートA、Bが交差している場合は、追加ルートCの速度を、ルートAとルートBとの交点に最も近いルートA、Bの各ノードに設定された速度の平均を求めて演算し、ルートAからルートBへの乗換カーブの半径を許容遠心力を考慮して演算して、交点から乗換カーブへの垂線の長さを演算し、垂線の長さが閾値以下となるように速度を調整して追加ルートCを設定する。
(もっと読む)
速度警報機能付カーナビ装置
【課題】従来、走行する道路状況が変わって制限速度も変わっている場合に、走行中の道路の制限速度と走行速度とを比較し、速度違反を犯さないように警報を発するカーナビ装置はなかった。
【解決手段】車両に搭載するカーナビ装置9のカーナビ情報格納部13内に制限速度格納部13Aを設け、そこへ地図情報の他に道路毎の制限速度の情報も格納しておく。GPS衛星1からの信号を受信すると、その信号に基づいて割り出した現在位置に対応した地図情報を読み出してカーナビ表示部11に表示すると共に、走行中の道路の制限速度も読み出して、車速センサ15で検出した走行速度と比較する。制限速度に近くなったり、超過したりしている時には、カーナビ表示部の一部に設けた警報領域11Aの色を、それぞれ黄色にしたり赤色にしたりして運転者に警報する。
(もっと読む)
車両制御装置
【課題】運転者により合致した車両制御を行なうことが可能な車両制御装置を提供する。
【解決手段】制御対象地点及び前記制御対象地点の周辺を走行したときの運転状態、運転者の状態及び路面状態を含む特定走行関連情報を検出する手段(S109)と、前記特定走行関連情報が検出された位置を検出する手段(S109)と、前記特定走行関連情報を検出された位置情報と共に仮保存する手段(S110)と、車両のナビゲーションシステム装置の地図情報の補正が行われた際に(S111)前記補正された地図情報に基づいて、前記仮保存された特定走行関連情報が検出された位置の情報を修正して記憶する手段(S112)と、前記特定走行関連情報と、前記記憶された特定走行関連情報が検出された位置の情報に基づいて、車両を制御する手段(S105)とを備えている。
(もっと読む)
車両システム、情報出力方法、及び、情報出力プログラム
【課題】 警告表示を即座にアイコンディスプレイに表示できる技術を提供する。
【解決手段】 警告を表示する場合、まず、アイコンディスプレイの記憶装置に記憶されているテキストデータ、画像データ等を表示する。一方、ナビゲーションシステムが、自身の記憶装置に記憶しているテキストデータ、画像データ等のうち、表示する警告のテキストデータ、画像データを抽出する。ナビゲーションシステムは、抽出したテキストデータ、画像データを順次、アイコンディスプレイに出力する。アイコンディスプレイは、入力されたテキストデータ、画像データ等を、入力された順等で表示する。
(もっと読む)
281 - 300 / 463
[ Back to top ]