
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
301 - 320 / 463
車両用駆動力制御装置
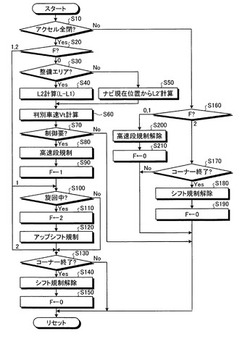
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両用周辺監視装置

【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
走行制御装置
【課題】複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる走行制御装置を提供する。
【解決手段】ナビゲーションシステム12、前方ミリ波レーダ30、近距離ミリ波レーダ32、前方画像センサ40及び後方/側方/周辺画像センサ42の複数のセンサ類を備え、LKA部221、ACC部222、PCS部241の複数の走行制御システムを備えた走行支援システム1において、センサの優先順位は走行制御の全てについて固定されているのではなく、走行制御の種別それぞれに対応して優先順位が設定され、LKA部221等のそれぞれは優先順位に従ってセンサ類それぞれの検出結果を適用して車両を制御するため、複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる。
(もっと読む)
車載情報端末、地図サーバ、および車載システム
【課題】地図データを利用して車両の走行を制御するシステムにおいて、精度の高い制御を実現する。
【解決手段】車両に装備されている走行制御装置群50を制御して車両の走行制御を行う車載情報端末10に、地図データを格納する地図DB100と、地図データの属性データの種類毎に、実地調査済みのエリア(サポートエリア)を特定する情報を対応付けたサポートエリア管理テーブル110と、車両が走行する領域を推定し、サポートエリア管理テーブル110を用いて、推定したエリアに含まれる属性データがサポートエリアに対応付けられているか否かを判定し、サポートエリアに対応付けられている場合、地図データを利用した車両の走行制御を行い、サポートエリアに対応付けられていない場合、地図データを利用した車両の走行制御を行わない制御部200と、両の走行制御を行わない制御部200と、を設ける。
(もっと読む)
道路の一部の上にある屈曲部を予測検出するための方法およびそれに関連するシステム
【課題】自動車が走行する屈曲部の特性を予測検出する。
【解決手段】自動車が走行する道路の一部にある屈曲部を予測検出するための方法であって、地理的測位システムからのデータ、および地図データのための受信機を利用するナビゲーションシステムと称する第1システムにより、第1の信頼性インデックスに関連する、屈曲部に関する第1の組の情報を確立するステップと、カメラおよび画像処理アプリケーションを利用し、画像処理システムと称する第2システムにより、第2の信頼性インデックスに関連する、当該屈曲部に関する第2の組の情報を確立するステップと、前記第1の信頼性インデックス、および前記第2の信頼性インデックスを考慮することにより、前記第1の組の情報、および前記第2の組の情報から、当該屈曲部に関する第3の組の情報を確立するステップとを含む、屈曲部を予測検出するための方法である。
(もっと読む)
車両用遮光装置
【課題】地図情報と自車及び他車の情報に基づいて今後に自車の乗員に対して他車のライトの光が照射されるか否かを予測して事前に遮光を行う車両用遮光装置を提供する。
【解決手段】ナビゲーション装置3から取得した地図情報と自車及び対象車両の情報から所定時間以内における自車の乗員の視界と対象車両のライトの光軸とをそれぞれ算出し(S6〜S10)、所定時間以内に自車の視線方向と対象車両のヘッドライトの光軸方向とが一致すると判定された場合に一致するタイミングで自車の乗員に対して他車のライトの光が照射されると予測し(S11)、調光ガラス5A〜5Dの該当領域を遮光状態となるように制御する(S14)ように構成する。
(もっと読む)
走行状況判定方法及び走行状況判定装置
【課題】本線車道からの退出において、自車両の走行状況を的確に判断することができる走行状況判定方法及び走行状況判定装置を提供する。
【解決手段】本線道路への退出において自車両の走行状況を判定する支援制御ユニット2は、退出終了を検出するための退出終了場面であるか否かを、自車位置と経路データ6a、地図描画データ6b又は路面に示された標示の位置を少なくとも有するレーン情報7aとに基づき判断するとともに、自車両のその時点の状況が退出終了場面であると判断した場合に、自車両の退出終了のタイミングを判定する。
(もっと読む)
車両用シート装置
【課題】連続カーブ走行中において、サイドサポート部のサポート動作を安定してすることのできる車両用シート装置を提供する。
【解決手段】ナビ協調制御プログラム(ステップS60〜S67)採用中において、ステップS52により異常が検知された場合には、ナビ協調制御プログラムから自律制御プログラム(ステップS1〜S3、S20〜S27、S30〜S38)に切り替える。また、自律制御プログラム採用中において、ステップS55により異常が検知されなくなった場合には、自律制御プログラムからナビ協調制御プログラムに切り替える。
(もっと読む)
走行制御計画生成システム及びコンピュータプログラム
【課題】自車両の走行方針を満足しつつ、周辺環境の状況変化に柔軟に対応することを可能とする走行制御計画生成システムを提供する。
【解決手段】走行制御計画生成システム1は、車両Aの走行方針に沿う上位計画を生成する上位計画生成手段22aと、上位計画を達成する計画であって、少なくとも走行軌跡を含む下位計画を生成する下位計画生成手段22bと、周辺車両B,Cの少なくとも走行軌跡を含む下位計画を取得する下位計画取得手段16,30と、周辺車両B,Cの下位計画を考慮して、車両Aの下位計画を所定の指標により評価する評価手段24と、評価手段24による評価に基づいて、車両Aが実行する下位計画を選定する下位計画選定手段26と、を備える。
(もっと読む)
クルーズコントロール制御の設定車速変更装置
【課題】走行環境により適した変更速度で設定車速を変更することができるクルーズコントロール制御の設定車速変更装置を提供する。
【解決手段】ドライバーの操作に基づいてクルーズコントロール制御の設定車速を変更する。このとき、追い越し車線及び走行車線のいずれを走行中であるか判定し(S202)、追い越し車線を走行中であれば、設定車速の変更速度を早くする(S206)。走行車線を走行中であっても、右ウィンカーがオンであれば(S205)、設定車速の変更速度を早くする(S206)。
(もっと読む)
ナビゲーション装置、車両用安全支援システム、車両位置誤差推定システム
【課題】車両の走行状況に応じて変化する自車位置の誤差量を正確に推定する。
【解決手段】マップマッチ処理部106は、慣性航法処理部102およびGPS処理部103による自車位置の算出結果と、地図データ読出処理部105によりHDD13から読み出された地図データとに基づいて、マップマッチング処理により自車位置を特定する。誤差推定部108は、自車両の走行に応じて所定の割合で誤差量の推定値を増加させ、自車両が特定の地点を通過したときに誤差量の推定値を減少させることにより、自車位置の誤差量を推定する。誤差情報出力部109は、誤差推定部108により推定された自車位置の誤差量に基づいて、自車位置の誤差情報を安全支援装置2へ出力する。
(もっと読む)
自動制動制御装置
【課題】自動制動により車両は減速するのか、または運転者の操作で車両を減速しなければならないかを容易に認識できる自動制動制御装置を提供する。
【解決手段】車両が進行すると推定される経路を進行推定経路24aとして表示する。この進行推定経路24aを車両が進行するものとして自動制動制御が実行される。進行推定経路24aは道路種別に基づいて推定される。たとえば、道路22cは細街路であるのに対し道路22bは国道であるので、進行推定経路24aは分岐点23aを通過した後、道路22bを通過する。進行推定経路24aは、車両の現在地から500m先まで推定されるので、進行推定経路24aは、500m先で途切れる。
(もっと読む)
車両用注意喚起装置
【課題】一時停止位置に関する注意喚起をより適切に行なうことが可能な車両用注意喚起装置を提供すること。
【解決手段】車両の進行方向に存在する一時停止位置に関する注意喚起を行なう車両用注意喚起装置(1)であって、車両と一時停止位置との距離を取得する距離取得手段(10)と、車両の車速を検出する車速検出手段(40)と、車両が走行する道路の勾配を特定する勾配特定手段(30、40)と、距離取得手段により取得された距離、車速検出手段により検出された車速、及び勾配特定手段により特定された勾配に基づいて、注意喚起を行なうか否かを決定する決定手段(52)と、を備えることを特徴とする。
(もっと読む)
自動制動制御装置
【課題】制動が開始されるタイミングをユーザが認識することができる自動制動制御装置を提供する。
【解決手段】車両の位置21が自動制動開始位置32より500mの位置になると、自動制動開始位置の拡大地図30aが分割画面として表示される。拡大地図30aには、自車位置マーク21とともに自動制動開始位置までの距離を示したインジケータ31aと、自動制動開始位置を示す自動制動開始位置マーク32とが表示される。インジケータ31aでは、車両の位置と自動制動開始位置との間の距離がバーの長さで表示され、自動制動開始位置に近づくにしたがってバーの長さは短くなる。車両の位置が自動制動開始位置より20mの位置になると、拡大地図30aに比べて縮尺率の大きい自動制動開始位置の拡大地図30bが分割画面として表示される。拡大地図30bには、拡大地図30aと同様に、自車位置マーク21とともにインジケータ31bと自動制動開始位置マーク32とが表示される。
(もっと読む)
運転支援方法及び運転支援装置
【課題】対向車両の有無の判断が困難である際に、運転支援を行うことができる運転支援方法及び運転支援装置を提供する。
【解決手段】運転支援ユニット2は、自車両前方の停止車両を検出する画像プロセッサ20と、自車両周辺の他車両に対して、自車両に対する対向車両に関する対向車属性データ及び周辺モニタデータの送信要求を行う通信I/F部18及び制御部10を備える。制御部10は、対向車属性データ又は周辺モニタデータの受信の有無、或いは周辺モニタデータに基づいて、対向車両が存在するか否かを判断し、対向車両が存在すると判断した場合には、警告出力処理を行う。
(もっと読む)
車載装置
【課題】 素早く分岐判定を行なうことのできる技術を提供する。
【解決手段】 車両が、車両の進行方位で分岐している本線上にいる場合、カメラにより撮影された各フレーム画像から本線の路面上に描かれた点線を検出し、先のフレーム画像において検出した点線が、以降に撮影されたフレーム画面において対角線方向に位置した場合、現在位置が分岐線上であると判定し、この判定に応じて、算出された現在位置を補正する。
(もっと読む)
車載装置、及び、走行距離補正方法
【課題】 ある程度の距離を走行しなくても、走行距離の誤差を補正することの可能な技術を提供する。
【解決手段】 カメラにより撮影された画像データから、高速道路上の路面に描かれた点線間を走行する間の車輪の回転数、又は、高速道路のキロポスト間を走行する間の車軸の回転数を取得し、取得した車輪の回転数から、車両の走行距離を補正する。
(もっと読む)
車両の走行制御システム
【課題】
自車両の前方の道路の形状の認識にあって自車位置との関係で迅速かつ正確に算出できる車両の走行制御システムの提供。
【解決手段】
少なくとも、車両の前方の道路の情報から前記車両の進行方向ベクトルと直交する線分の前記道路の中心線に至るまでの横位置距離を該進行方向ベクトルの伸張方向に沿った複数の計測点で検出する変位検出手段と、
この変位検出手段によって得られる各横位置距離の変化の線形性から道路形状を特定する道路形状認識手段と、
この道路形状認識手段の前記特定の結果に応じて前記車両の走行制御を行う走行制御手段と、
を備える。
(もっと読む)
表示装置、撮像装置、表示方法、及び表示処理プログラム
【課題】ディジタルカメラで撮影して取得した地図イメージ情報の使い勝手の向上を図ることを目的とする。
【解決手段】地図イメージ情報を撮影して取り込み、この地図イメージ情報から切り出された画像中からエッジ検出のフィルタ等により道路部分を判別する。判別された道路部分から道路座標情報を検出して記録する。表示位置の変更操作があったら、道路座標情報を読み出し、操作方向側に延長した道路上となるように、表示指示点を移動させる。これにより、十字キーの操作により表示位置を上下左右に変更させた場合、道路に沿って、表示指示点を移動させることができ、ディジタルカメラに保存しておいた地図の使い勝手の向上を図ることができる。
(もっと読む)
停車予測位置を表示するナビゲーション装置
【課題】運転者が瞬時に直感的な視覚情報で停車予測位置の情報を得ることができるナビゲーション装置を実現する。
【解決手段】ナビゲーション装置において、自車両の走行速度と、降雨情報と、外気温情報を基にした凍結情報と、走行路の路面傾斜情報と、を用いて算出した制動距離をもとに、車載の撮像装置で撮像した車両前方の前景画像に、予測される停車位置の範囲を重ねて画像を加工することで停車予測位置を表示させる。
(もっと読む)
301 - 320 / 463
[ Back to top ]