
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
81 - 100 / 463
運転支援装置、運転支援方法および運転支援プログラム
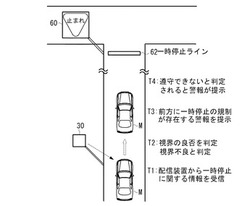
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
運転支援装置及びプログラム

【課題】地図情報や位置情報に問題がある場合でも、市街地等の目的とするエリアを精度良く判定して、そのエリアに対応した好適な制御を行うことができる運転支援装置及びプログラムを提供すること。
【解決手段】ステップ140では、自車両と歩行者との横位置(横方向における距離)が近いか否かを判定する。ステップ150では、歩行者の数が多いか否かを判定する。前記ステップ140及びステップ150で肯定判断されて進むステップ170では、自車両が市街地を走行していると判断して、安全のために、車速を制限する制御を行う。ステップ160では、自車両と歩行者との横位置が遠く、また、自車両の前方の歩行者の数が少ないので、市街地でなく、市街地から外れた一般道路であると判断して、一般道路に適した制限車速に設定する。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
車載装置
【課題】SA/PAから導入路への逆走を効果的に防止する。
【解決手段】車載装置は、SA/PA300に進入するための導入路302と高速道路301との分岐点311を中心にした扇形の範囲を逆走判定範囲312aまたは312bとして設定し、自車位置310が逆走判定範囲312aまたは312bの内側にあるかどうかを判定する。自車位置310が逆走判定範囲312aまたは312b内にあると判定された期間における走行距離を取得し、その走行距離が閾値を越えている場合に車両が逆走しようとしていると判定し、乗員に警告を行う。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
運転支援装置
【課題】より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
(もっと読む)
運転アシストシステム
【課題】エコモード設定による加速不足で、交通の流れを悪くしてしまうなどの問題を解消する運転アシストシステムを提供する。
【解決手段】本発明は、エネルギーをセーブして走行するエコモードを備える車両に搭載される運転アシストシステムであって、周辺車両の走行状況を取得する周辺車両走行状況取得手段と、前記車両の外界と重畳させるように画像を表示する表示手段と、前記表示手段に表示する前記車両の予測到達位置を算出する位置算出手段(ステップS112)と、前記周辺車両走行状況取得手段によって取得された前記周辺車両の走行状況と、前記位置算出手段によって算出された前記車両の予測到達位置とから、前記車両が前記周辺車両と接触する可能性があるか否かを判定する判定手段(ステップS114)と、前記判定手段によって前記車両が前記周辺車両と接触する可能性があると判定されたときに警告を行う警告手段(ステップS115)と、を有することを特徴とする。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】車両の後進を防止しながらエネルギー回収率を高める技術の提供。
【解決手段】車両の前方の目標位置および当該目標位置における目標車速を特定し、前記車両の現在車速を取得し、前記現在車速が所定の閾値より大きい場合に前記車両に搭載された発電機を制御して回生ブレーキのみを発生させることにより前記車両を減速させ、前記現在車速が前記所定の閾値以下である場合に前記発電機を制御して回生ブレーキを発生させ、かつ、前記車両に搭載された摩擦制動部を制御して当該回生ブレーキよりも大きい制動力の摩擦ブレーキを発生させることによって前記目標位置における車速が前記目標車速となるように前記車両を減速させる。
(もっと読む)
運転評価装置
【課題】運転者個人に適した運転評価を行うこと。
【解決手段】運転評価装置1は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標状態記憶部13と、許容危険度に基づいて当該複数の目標情報から一の目標情報を選択する目標状態選択部14と、自車両の状態量を検出する車両状態検出部12と、検出された自車両の状態量に基づいて現在の危険度を推定する運転推定部15と、選択手段により選択された一の目標情報の危険度と推定された危険度とを比較して自車両の運転状況を判定する判定部16と、許容危険度と推定された危険度とに基づいて該許容危険度を修正する修正部18と、を備える。
(もっと読む)
逆走警告装置
【課題】逆走の開始前に逆走のおそれがあることを検出可能な逆走警告装置において、逆走するおそれがあると誤判定することを防止する逆走警告装置を提供すること。
【解決手段】所定以下の車速で逆走のおそれを検出する逆走警告装置100であって、自律航法により自車位置を検出する自律航法手段33と、車線区分線に対する自車両の車長方向の角度を検出する角度検出手段22と、前記角度が略90度になり、かつ、前記自車位置から本線までの直線距離が閾値以下であることを条件に、逆走のおそれがあることを検出する逆走検出手段31と、を有することを特徴とする。
(もっと読む)
道路形状学習装置、道路形状学習方法および道路形状学習プログラム
【課題】車両制御の対象となる区間を確実に含み、且つ、曲率半径が比較的大きい区間までを、コーナ区間として適切に検出する技術の提供。
【解決手段】車両の走行軌跡を取得し、当該取得した走行軌跡に基づく位置情報と曲率半径情報とを対応付けて記憶部に記憶し、記憶されている位置情報と前曲率半径情報とに基づいて、第1閾値以下である曲率半径を示す曲率半径情報に対応付けられた位置情報が連続する区間を第1区間として検出するとともに、記憶されている位置情報と曲率半径とに基づいて、前記第1区間を包含する区間であって、且つ、前記第1閾値よりも大きい第2閾値以下である曲率半径を示す曲率半径情報に対応付けられた位置情報が連続する区間を第2区間として検出し、検出した第2区間がコーナ区間であると特定して当該コーナ区間の形状を示すコーナ情報を作成する。
(もっと読む)
運転支援表示装置
【課題】運転者にとって、現在車速が適正かどうかを余裕を持って確認でき、且つ、直感的に分かりやすい運転支援表示装置を提供する。
【解決手段】前方道路の形状、現在車速Vcurを逐次取得し、それらから理想走行軌跡32および予測走行軌跡33を逐次更新しつつ、車両走行中、常時、理想走行軌跡32と予測走行軌跡33とを表示器30に表示する。現在車速Vcurが前方のカーブを安全に走行するための理想的な速度である場合や、その理想的な速度をやや超えている程度であり、危険と判断するほどではない場合にも、理想走行軌跡32と予測走行軌跡33を表示器30に表示することになる。そのため、運転者は、運転操作に余裕のあるときに表示を確認することができる。また、現在車速Vcurが適正かどうかを理想走行軌跡と予測走行軌跡とのずれから判断することができるので、直感的に分かりやすい。
(もっと読む)
自動二輪車用の走行情報表示方法
【課題】自動二輪車の走行支援を適切に行うための自動二輪車用の走行情報表示方法を提供すること。
【解決手段】画像表示装置100を有する自動二輪車における当該画像表示装置100に走行情報を表示する方法であり、自動二輪車の走行時において、画像表示装置100には複数の走行情報が同時に表示され、走行情報には、少なくとも車速が含まれており、自動二輪車の走行時において、車速を示す車速メータ30は、他の走行情報(31〜37)を表示するマークによって覆われずに露出して表示される。
(もっと読む)
ナビゲーション装置
【課題】車体をカーブで走行させる際に、カーブの環境の変化や運転者の意識に対応して適正に報知を行うナビゲーション装置を構成する。
【解決手段】車体がカーブに接近した際に、カーブの半径に基づいてカーブでの適正走行速度を算出し、車体の走行速度が適正走行速度より高速である場合に、減速度設定手段28が車体の走行時における基準減速度を算出し、基準減速度が閾値を超えることを報知出力手段30が判別したタイミングで左振動体VLと右振動体VRを同時に駆動する等の報知を行う。
(もっと読む)
走行支援で利用される情報の信頼度特定装置、方法およびプログラム
【課題】多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
(もっと読む)
ナビゲーション装置
【課題】車両が走行している車線をより確実に推定することができるナビゲーション装置を提供する。
【解決手段】車両の現在地を検出する現在地検出装置14と、道路画像を記憶するデータ記憶装置110と、車両が走行している車線を撮像する撮像カメラ19と、データ記憶装置110によって記憶された分岐点ガイド画像の中から現在地検出装置14によって検出された現在地に対応する分岐点ガイド画像を読み出し、読み出された分岐点ガイド画像から道路標示を抽出し、撮像カメラ19によって撮像された車両前方道路実画像から道路標示を抽出し、抽出された道路標示を比較することにより、車両の自車位置を推定する制御回路11とを備える。
(もっと読む)
ナビゲーション装置および車両制御装置
【課題】ナビゲーション装置の地図の情報を車両制御に使用するシステムにおいて、より詳細な地図情報が車両制御に必要となると速度が不十分となる。
【解決手段】車両制御装置に地図を記憶する記憶装置を設け、位置検出や車両制御に必要な地図を記憶する。記憶装置に格納する地図は、車両制御装置とナビゲーション装置を接続する地図用ネットワークにより、ナビゲーション装置から転送し、車両制御装置からの現在地周辺の地図要求あるいは、経路計算に伴う経路に沿った地図をナビゲーション装置から転送する。
【効果】車両制御装置が地図を保持するため、高速に詳細な地図情報を利用可能となることから、交差点形状などを利用した高度な制御が可能となる。
(もっと読む)
走行支援内容決定装置、走行支援内容決定方法および走行支援内容決定プログラム
【課題】多様な実行対象プログラムで利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】車両の状態および前記車両の周囲の状態に基づいて、プログラムによって実行可能な複数の機能から実行対象となる実行対象機能を選択し、前記プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録した記録媒体を参照し、前記実行対象機能に対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報を前記記録媒体から取得し、当該精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定し、前記信頼度に応じて前記実行対象機能を実行するか否かを決定する。
(もっと読む)
運転支援装置
【課題】本発明は、支援情報の有効期間に応じた適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】路側装置から受信した支援対象地点までの支援情報に基づいて支援対象地点における自車の運転を支援する運転支援装置1であって、路側装置から支援情報の有効期間を取得する有効期間情報取得手段10,21と、取得した支援情報の有効期間に応じて運転支援を行う運転支援手段24,25,26,27とを備えることを特徴とし、さらに、自車の支援エリアからの逸脱を判定する逸脱判定手段23を備え、運転支援手段24,25,26,27は、逸脱判定手段23での判定結果と支援情報の有効期間内か否かに応じて運転支援内容を変更すると好適である。
(もっと読む)
81 - 100 / 463
[ Back to top ]