
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
41 - 60 / 463
運転支援装置、情報配信装置、運転支援方法及びコンピュータプログラム
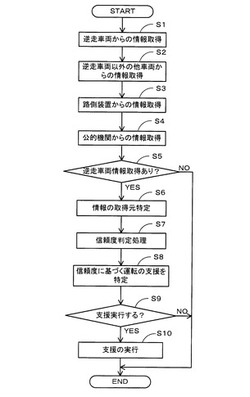
【課題】取得した逆走車両情報に基づく適切な運転の支援を行うことが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】複数の取得元から逆走車両を特定する逆走車両情報を取得し(S1〜S4)、取得した逆走車両情報の取得元の種類を特定し(S6)、特定された取得元の種類に基づいて取得した逆走車両情報の信頼度を判定し(S7)、判定された信頼度に基いて、自車両に対する逆走車両を回避する為の運転の支援を行う(S8〜S10)ように構成する。
(もっと読む)
車載用ナビゲーション装置

【課題】マップマッチングの精度を向上させた車載用ナビゲーション装置を提供する。
【解決手段】各々の道路が車線数に拘わらずひとつのリンクにより表された地図データ131を格納したハードディスクドライブ130と、自車両の現在地を取得する現在地検出装置170と、現在地に対応付けられたリンク上の位置に自車位置マークを表示する経路案内部112と、自車両の走行車線を認識する車線認識部113と、自車両が走行中の道路における1車線当たりの道路幅を取得する道路幅取得部114と、自車位置マークが表示されたリンクと現在地との間の距離を算出するリンク距離算出部115と、自車位置マークが表示されたリンクが、走行中の道路のどの車線に対応しているかを推定するリンク車線推定部116とを備える車載用ナビゲーション装置100。
(もっと読む)
車両走行危険度評価システム
【課題】
道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行い、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価を予め前もって運転者に提示する。
【解決手段】
システムのCPU111は、現在位置から目的地までの走行予定経路を、付与された探索条件の下で道路情報に基づいて設定する。CPU111は、車両が設定された危険度評価位置に到達した際に、走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、重心位置関連情報と、危険度評価位置での車速に基づき、車両の危険度を評価する。
(もっと読む)
運転支援装置
【課題】より高精度にリスク度合いを設定して、注意喚起を行うことが可能な運転支援装置を提供する。
【解決手段】地図データ中に含まれる道路のリスク度合いを設定する際に、危険回避行動発生情報、及び事故の発生情報に基づき、更にこれらが発生したときの、天候、曜日、時間帯、路面状態、交通量を考慮する。従って、車両2が同一の地点を通過する場合であっても、そのときの天候、曜日、時間帯、路面状態、交通量等の要因に応じて、注意喚起をするべきか、或いは注意喚起は不要であるかを判断することができる。
(もっと読む)
分岐判断装置
【課題】分岐判断の際、分岐判断が誤っていた場合でも、その後ドライバの操作により、進路を訂正する。
【解決手段】現在位置情報及び分岐路情報を出力する現在位置算出手段10と、道路上の路面ペイント情報を認識して、分岐線横切情報を出力する路面ペイント認識手段20と、ドライバ操作情報を検出するドライバ操作検出手段30と、現在位置情報と分岐路情報と分岐線横切情報とドライバ操作情報とに基づいて自車両が分岐路に入ったか否かを判断する分岐判断手段40と、を有し、分岐判断手段40は、分岐線横切情報に基づいて分岐判断を行う第1の分岐判断手段と、ドライバ操作情報に基づいて分岐判断を行う第2の分岐判断手段と、を有し、分岐判断手段40は、現在位置算出手段にて、現在位置情報と分岐路情報から、自車両の前方に分岐路があると判断された場合、第1の分岐判断手段と第2の分岐判断手段によって分岐判断を実行する。
(もっと読む)
車両用警報装置
【課題】 自車両の速度を接触、衝突事故が回避できる速度まで抑制するよう、速度超過を車両運転者に報知する。
【解決手段】 自車位置認識手段1は、自車両の位置を検出し、自車位置環境を認識する。車速検出手段2、自車両の速度を検出し速度データを出力する。制御手段3は、自車位置環境及び前記速度データに基づいて、速度超過を報知するか否かを判断する。触刺激手段4は、車両運転者に速度超過情報を触刺激により伝達する。自車位置認識手段1は、位置データに基づいて、走行に注意を要する区域内であるか否かを判断する。制御手段3は、自車位置認識手段1の認識結果が走行に注意を要する区域内であり、且つ、速度データが所定値以上であるときに、前記触刺激手段4に触刺激を発生させる。
(もっと読む)
車両横転限界速度演算装置
【課題】
走行状態、車両操作状態の検出が必要でなく、車両の重心情報、車両のトレッド幅、及び車両が走行する道路のカーブの曲率半径に基づいて、走行する前に横転限界速度を演算して、前記運転限界速度と前記カーブに関連づけて利用することができる車両横転限界速度演算装置を提供する。
【解決手段】
重心位置測定装置1は車両の車両幅方向重心位置、車両全長方向重心位置、車両のトレッド幅、車両が走行する道路のカーブの曲率半径に基づいて、車両が横転する速度の下限である横転限界速度を演算する。又、重心位置測定装置1は、算出した横転限界速度をカーブに関連付けて出力するプリンタ39、表示装置42、I/Oインターフェイス54を備える。
(もっと読む)
俯瞰画像生成装置、地図データ生成システム、俯瞰画像生成装置の俯瞰画像生成方法および俯瞰画像生成プログラム
【課題】道路を見下ろした精度が高い俯瞰画像を提供できるようにすることを目的とする。
【解決手段】車両はレーザスキャナとカメラとを備えて道路を走行する。レーザスキャナは道路の各地点に向けてレーザを照射して道路の各地点までの距離と方位とを計測する。カメラはカメラ映像を撮影する。俯瞰画像生成装置は、画像生成装置記憶部190と地面高特定部130と俯瞰画像表示部とを備える。画像生成装置記憶部は、レーザスキャナの計測データに基づいて生成され道路の各地点の三次元座標を示す三次元点を含んだデータを三次元点群として記憶し、カメラによって撮影されたカメラ映像を記憶する。地面高特定部130は三次元点群から道路の縁石を表す複数の三次元点を抽出し、抽出した複数の三次元点に基づいて道路面の高度を地面高として特定する。俯瞰画像表示部は地面高とカメラ映像とに基づく画像であって道路を見下ろした俯瞰画像を表示する。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
車載用電子機器
【課題】施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、停車時の進行方向と発車時の進行方向が一致する場合に、危険な状況の内容をユーザに分かり易くすることができる車載用電子機器を提供する。
【解決手段】警告を行う警告部と、車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、前記判定結果に応じて、発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に異なった警告を前記警告部に行わせる警告制御部と、を備えた車載用電子機器とする。
(もっと読む)
ナビゲーション装置
【課題】必要に応じて自動的に投射映像の表示が開始される車載用ナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮影し映像信号を出力するカメラ群180と、自車両が走行する道路において、自車両が走行可能な道路幅が所定幅以下であることを検知する隘路検知部113と、検知に応じて、道路において自車両による走行が困難か否かを判定する難路判定部114と、難路判定部114により走行が困難であると判定されたことに応じて、映像信号に基づく投射映像を表示する投射映像表示部117と、を備える車載用ナビゲーション装置100。
(もっと読む)
ナビゲーション及びインスペクションシステム
【課題】地理的空間内における状況の変化を、移動中の車両から検出する。
【解決手段】地理的空間の画像を、GPS座標と共に、GPS座標と関連させて記憶する。同じ地理的空間を、移動する車両により経路のGPS座標にアクセスしながら通過する。記憶された画像のGPSデータを通過した地理的空間のGPSデータと同調させることによって記憶された画像16を再生し、記憶された画像16と通過する地理的空間画像15とを同時に閲覧可能にする。移動中の車両内で移動する観察者は、記憶された画像16と通過する空間の画像15とを比較して、状況の変化を確認する。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
運転支援装置
【課題】車両区画線の位置を適正に推定し、適正な運転支援情報を出力する。
【解決手段】車両に搭載され、運転者に対して運転支援情報を出力する運転支援装置であって、車両が走行する車線の右側及び左側に敷設されている車両区画線を検出する白線検出手段と、車両の位置情報、及び、地図情報に基づいて、車両の前方に、車両が走行している道路の分岐箇所が有るか否かを判定する分岐判定手段と、道路の分岐箇所における車両の進行方向を推定する方向推定手段と、分岐判定手段によって道路の分岐箇所が有ると判定された場合に、道路の分岐箇所において、運転支援情報の出力に用いる仮想的な車両区画線である仮想区画線を、方向推定手段によって推定された進行方向ではない分岐路を横断するべく生成する仮想線推定手段と、仮想線推定手段によって推定された仮想区画線の位置に基づいて、運転支援情報を出力する情報出力手段と、を備える。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】道路形状を考慮してタイヤの溝の残量を予測することができ、その予測残量に応じた案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置10は、地図情報DB12aと、走行経路探索部11aと、車両が道路を走行する場合のタイヤの変化量コストを道路形状毎に格納した変化量コストテーブル12bと、タイヤの溝の現在残量を特定する現在残量特定部11bと、道路形状毎の変化量コストとに基づいて、タイヤの変化量コストを算定する変化量コスト算定部11cと、現在残量と変化量コストとに基づいてタイヤの溝の予測残量を算定する予測残量算定部11dと、予測残量に基づいてタイヤに関する案内を行う案内制御部11eとを備える。
(もっと読む)
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
車両用対象物画像認識装置、車両用対象物画像認識方法及びコンピュータプログラム
【課題】従来より簡易な処理によって画像認識処理を実行することを可能とした車両用対象物画像認識装置、車両用対象物画像認識方法及びコンピュータプログラムを提供する。
【解決手段】バックカメラにより撮像された撮像画像中に含まれる対象オブジェクトのバックカメラの光軸方向に対する相対角度(対象相対角度)を検出し(S5)、同じく、バックカメラにより撮像された撮像画像中に含まれる基準オブジェクトのバックカメラの光軸方向に対する相対角度(基準相対角度)を検出し(S7)、検出された基準相対角度と対象相対角度とに基づいて、基準オブジェクトに対する対象オブジェクトの相対角度(比較相対角度)を算出し(S9)、算出された比較相対角度を対象オブジェクトに対応づけてオブジェクトDBに記憶し、オブジェクトDBを作成する(S10)ように構成する。
(もっと読む)
41 - 60 / 463
[ Back to top ]