
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
421 - 440 / 463
沿道情報の確度を判断して自動操舵制御を行う車輌
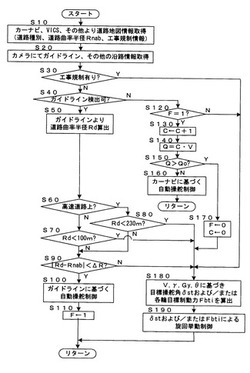
【課題】白線によるガイドライン等のカメラ等による読み取りにより得られる沿路情報に基づく車輌の自動操舵制御を高い安全性の下に実行する車輌を提供する
【解決手段】道路に沿って装備された情報源を車輌に装備された情報読取り装置により読み取ることにより得られる沿路情報に基づいて自動操舵制御を行う車輌に於いて、沿路情報の確度を道路地図提供手段が提供する道路地図情報に基づいて判断し、該確度が所定の基準に適合しないときには、沿路情報に基づく自動操舵制御を行わないようにする。
(もっと読む)
車両認識方法及び車載装置

【課題】周辺の車両に関する情報を取得する処理を軽減することができる車両認識方法及び車載装置を提供する。
【解決手段】運転支援装置1のCPU2は、車両に設けられた周辺監視カメラ20から周辺撮像データを取得する。また、画像プロセッサ10は、周辺撮像データ内で、隣接車線領域を設定し、隣接車線領域内に認識部分枠を設定する。さらに、画像プロセッサ10は、認識部分枠内の輝度データと、後方監視カメラ21により撮像された後方撮像データのサンプル枠内の輝度データとを比較し、路面上の物体を検出する。そして、検出物ありと判断された認識部分枠とその周辺に対し、エッジ検出を行って、他車両を認識する。
(もっと読む)
車載通信装置及び車両間通信システム
【課題】各車両が自車の情報を周辺車両に同報することができる車載通信装置及び車両間通信システムを提供すること。
【解決手段】車載通信装置10は、車両が交差点エリア及び道路エリアのいずれにあるかを判定するエリア判定手段11と、車両の進行方向及び車両が存在するエリアに応じて無線信号の周波数チャネルを設定する周波数チャネル設定部12と、無線信号によって車両間の無線通信を行う無線通信部13とを備え、エリア判定手段11は、地図データを記憶する地図データ記憶部11aと、車両の現在位置を検出する現在位置検出部11bと、交差点エリアへの車両の流入出を判定する交差点エリア流入出判定部11cとを備える。
(もっと読む)
運転支援装置及びプログラム
【課題】運転者の危険箇所を認知する負担を軽減した運転支援装置を提供する。
【解決手段】走行時に走行情報(走行速度、加減速度合い、トラクション情報、操舵角情報、車道における走行位置、ハンドル操作、アクセル操作、ブレーキ操作、シフト操作、ウィンカー操作等)を記憶しておき、走行後、走行情報に基づいて運転評価を行う(S220)。そして、危険運転状態が発生した箇所の情報を記憶する(S230)。以降、この記憶しておいた情報を用いて、次に当該箇所を通行する際に運転者へ警告する。このようになっていれば、運転者の危険箇所を認知する負担を軽減できる。
(もっと読む)
運転支援システム
【課題】車両がカーブを安全な速度で通過できるように支援する運転支援システムを提供する。
【解決手段】カーナビゲーション装置により自動車の現在の位置座標と進行方向が検出される。ナビゲーション制御部は、自動車の進行経路に存在するカーブを検出し、カーブ情報をシステムコントローラに入力する。速度算出部はカーブ情報に基づいて目標速度を算出する。自動車の速度が目標速度より大きい場合は、スロット機構部及び自動変速機を制御して自動車を目標速度以下まで減速させる。車載カメラで前方のカーブが撮像されると、画像データから障害物の検出が行われる。障害物が検出されると速度算出部は、障害物情報とカーブ情報に基づいて最適速度を算出し、自動車の速度が最適速度より大きい場合にはスロット機構部及び自動変速機を制御し、自動車を最適速度以下まで減速させる。よって、障害物の存在するカーブでも安全に通過できる。
(もっと読む)
車載用ナビゲーション装置
【課題】平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】地図データを格納した手段と、自車位置を検出する手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信し、発信信号に対する対象物からの反射信号を受信したときに当該対象物までの距離を検出する手段とを備えた車載用ナビゲーション装置において、検出された自車位置と地図データを参照して(S1)、検出された当該対象物までの距離を指示する信号の強度の変化に応じて(S2,S3,S6)、自車の走行状態を検知する(S4,S7,S8)。
(もっと読む)
信号状態検知装置、その制御方法及び制御プログラム
【課題】車両側で自律的に完結する処理により、インフラ整備に依存することなくどのような場面でも信号待ちでのアイドリングストップに関するユーザの判断や、エンジンの停止や始動の操作を効果的にタイミングよく支援する。
【解決手段】カメラ1により車両周辺の映像を撮像し、信号検知部2により、撮像された映像から信号機の信号状態又はその変化を検知する。また、ナビゲーション装置3などの自車位置検出手段により、所定の測位システムを用いて自車の現在位置を現在位置情報として検出する。そして、OSDオーバーレイ部4により、検知した前記信号状態での状態時間と前記現在位置の各情報を表示画像として重畳し、表示制御部5により、重畳した前記表示画像を所定の表示モニタ部7へ表示する。
(もっと読む)
車両用情報提供装置
【課題】 運転者が有している嗜好性により適合するように、様々な情報を適切な態様で提供可能とする。
【解決手段】 車両用情報提供装置1のエージェント機能部5は、携帯電話機2又はICカード3より運転者を特定するための個人情報を取得すると共に、その個人情報に対応する嗜好性情報を取得すると、取得した嗜好性情報に適合するように、運転者に提供する情報の種類や、運転者に情報を提供する頻度若しくは割合を変化させる。
(もっと読む)
駐車位置探索支援装置、方法およびプログラム
【課題】 容易に自車の駐車位置を把握でき、かつ低コストな駐車位置探索支援装置を提供すること。
【解決手段】 撮影制御部17は、位置情報取得部14から出力される情報に基づいて、車両が駐車場に入ったことを判定する。車両が駐車場に入ると、車載カメラ20で撮影される車両の進行方向にかかる映像を所定の時間間隔で画像記憶部18に記憶していく。車両が駐車位置に停められ、サイドブレーキが引かれると、撮影を停止する。その後、撮影した画像を、通信部22を介して利用者の持つ携帯端末に送信する。利用者は、携帯端末で当該画像を見ながら、自車の駐車位置を容易に把握することが可能となる。
(もっと読む)
危険回避システム
【課題】 地震などの天災により路面が走行上危険な状態にあることを検知して道路を走行中の車両に伝達して危険回避に供し得るシステムを提供する。
【解決手段】 道路に沿って道路や建物にRFIDタグ10を設置する。RFIDタグ10には湿度・温度・圧力・地磁気センサなどが接続される。RFIDリーダー/ライター12からRFIDタグへ定期的に問い合わせを行ない、予め設定されている上・下限値をオーバーしていれば異常と判定する。判定結果は、道路を走行中の車両16に設置されたRFIDリーダーからの読み出しを可能とするため、当該RFIDタグ10に書き込まれ、また、情報センター14を介して車両16へ伝達される。
(もっと読む)
カーナビゲーション装置
【課題】車両の走行状態や道路の経路状態を判断して、受信情報を適切に報知することができるカーナビゲーション装置を提供する。
【解決手段】車両の現在位置を検出する現在位置検出部102と、現在地から目的地までの経路を探索する経路探索部104と、経路探索部104で探索した経路を地図上に表示する表示部105と、外部装置と情報の送受信を行なう通信部111と、通信部111が情報を受信した時点における報知可否を判断する第1報知可否判断部116と、通信部111が情報を受信した時点から経路移動した時点における報知可否を判断する第2報知可否判断部117と、第1報知可否判断部116と第2報知可否判断部117の報知可否判断に基づいて情報を報知する音声出力部106とを備え、車両の走行状態や道路の経路状態を判断して、受信情報を適切に報知する。
(もっと読む)
車両の減速制御装置
【課題】コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両前方のコーナを検出する手段(S101)と、車両の減速制御を行う手段(S108)と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段(S103)と、前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段(S107)とを備え、前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定される(S104、S106)。
(もっと読む)
車両の減速制御装置
【課題】コーナや登降坂路を含む道路環境に対する減速制御において、運転者の期待に対して、より合った制動力を付与することが可能な車両の減速制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段(S101)と、前記道路環境に基づいて目標車速又は必要減速度を設定する手段(S104)と、前記目標車速又は必要減速度に基づいて車両の減速制御を行う手段(S106)と、前記減速制御による減速度に対する運転者の不満足感を検出または推定する不満足感検出/推定手段(S112)とを備え、前記不満足感検出/推定手段による検出又は推定結果に基づいて、前記目標車速又は必要減速度を補正する(S113)。前記不満足感検出/推定手段は、車両の駆動力を操作するための手段と運転者との位置関係を検出する手段を含む。
(もっと読む)
車両用停止線検出システム
【課題】 道路上の停止線を正確に検出する。
【解決手段】 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
(もっと読む)
ナビゲーションシステム
【課題】本線に合流する加速車線に自車が進入すると、自車情報と他車情報とに基づいて選択した種類の案内を行うようにして、ユーザが安心して、かつ、安全に本線に車線変更することができるようにする。
【解決手段】地図データを格納するデータ格納部と、自車の現在位置を検出する現在位置検出部と、前記地図データ及び自車の現在位置に基づいて、現在位置から本線に合流する加速車線の終点までの距離を取得する加速車線残り距離取得部と、前記加速車線上の自車の情報、前記本線上の他車の情報、及び、前記現在位置から加速車線の終点までの距離に基づいて、自車が前記加速車線から本線に合流することを支援する合流支援案内の種類を選択する合流支援案内選択部と、該合流支援案内選択部によって選択された合流支援案内を行う案内実行部とを有する。
(もっと読む)
車両制御装置
【課題】 多段階で一連の運転支援を適切に行う。
【解決手段】 多段階で一連の運転支援を行う車両制御装置において、自車位置検出手段と、地図データ記憶手段と、進行方向前方の注意地点を検出する注意地点検出手段と、自車の走行状態を検出する走行状態検出手段と、走行状態、及び、注意地点に対する自車位置の位置関係に基づいて、少なくとも2段階以上の支援実施タイミングを検出し、各支援実施タイミングでそれぞれ異なる態様の運転支援を行う運転支援手段と、を備え、前記運転支援手段は、前回周期で把握された注意地点に対する自車位置の位置関係が、今回周期で行われたGPS誤差補正等の定期的又は不定期的な自車位置補正処理により大きく変化したことに起因して、第1段階と第2段階の支援実施タイミングが時間的に近くなった場合、第2段階の支援実施タイミングを補正することを特徴とする。
(もっと読む)
安全走行支援装置
【課題】本発明では地図データとその利用に関する知識(道路知識)を用いて安全誘導を行なうことを課題とする。
【解決手段】上記の課題を解決するため、道路の個々のレーン、停止線、導流線、および車歩道境界(道路縁石)を記載した道路地図データに車両位置を重畳させ、交差点での車両位置を地図にて把握し、さらに道路知識DBによって道路構造物と車両位置の関係を判定し位置関係、距離に基づいて次に取るべき運転情報を運転者に知らせる。
(もっと読む)
車載用ナビゲーション装置
【課題】 減光/暗色化処理の実行と解除とが繰り返される頻度を低減させることにより、表示部に表示される画像の視認性と描画性能等のナビゲーションの性能とを向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 地図情報に基づいて暗所の連続状態を判定する暗所連続状態判定手段28と、この暗所連続状態判定手段28によって所定の距離未満の間隔で連続していると判定された複数の暗所を1つの暗所とみなし、自車が前記1つの暗所とみなされた複数の暗所を走行する際に、減光/暗色化処理手段27が1つの暗所に相当する減光/暗色化処理を行うように減光/暗色化処理手段27を制御する制御手段30とを備えたこと。
(もっと読む)
走行支援装置
【課題】 運転者が違和感や不安感を感じることを低減してカーブへの進入を誘導する走行支援装置を提供すること。
【解決手段】 車両の走行位置を推定する走行位置推定手段6と、車両の走行方向前方の道路情報を抽出する道路情報抽出手段7と、道路情報抽出手段7によりカーブが抽出された場合に、該カーブを走行する際のカーブ推奨速度を設定するカーブ推奨速度設定手段9と、カーブ推奨速度設定手段9により設定されたカーブ推奨速度に基づき、該カーブ手前の所定の位置に進入する際の進入推奨速度を設定する進入推奨速度設定手段8と、進入推奨速度設定手段8により設定された進入推奨速度を報知する報知手段10と、を備えることを特徴とする走行支援装置、を提供することで上記課題を解決する。
(もっと読む)
車両制御装置
【課題】制御パラメータに誤差が生じるのを防止し、走行フィーリングを良くするとともに、走行制御の確実性を向上させることができるようにする。
【解決手段】データ記憶部16と、データ記憶部16からノードデータを読み出すデータ読出手段61と、ノードデータに基づいて、所定のノードにおいてリンク角が設定値以下である場合に、所定のノードのノードデータが無効であるとするノードデータ判断手段91と、無効なノードデータを間引くノードデータ加工手段92と、有効なノードデータに基づいて走行制御用の制御パラメータを算出するパラメータ算出手段93と、制御パラメータに基づいて走行制御を行う走行制御手段94とを有する。無効なノードデータが間引かれ、有効なノードデータに基づいて走行制御用の制御パラメータが算出されるので、走行フィーリングを良くするとともに、走行制御の確実性を向上させることができる。
(もっと読む)
421 - 440 / 463
[ Back to top ]