
Fターム[2F129GG12]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 道路形態 (463)
Fターム[2F129GG12]に分類される特許
441 - 460 / 463
ナビゲーション装置及びナビゲーション方法
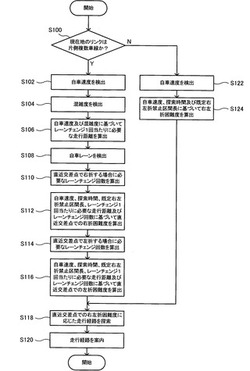
【課題】 前方交差点での正確な右左折困難度に応じた適切な走行経路を案内できるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 自車の進行方向に通行可能なレーン数と前記自車が位置するレーンとを検出するレーン検出手段と、前記自車の進行方向に通行可能なレーンの渋滞度を検出する渋滞度検出手段と、検出された前記レーン数、前記レーン及び前記渋滞度に基づいて前方交差点での右左折困難度を判定する判定手段と、判定された前記右左折困難度に応じた走行経路を案内する案内手段と、を備えるナビゲーション装置。
(もっと読む)
車載通信装置および車載通信装置用プログラム

【課題】ハンズフリー機能を有する車両用ナビゲーション装置1が、近隣の適当な場所で電話に応対しようという意志に沿った作動を行うようにする。
【解決手段】車両用ナビゲーション装置1は、電話着信があったときに、立ち寄り地即通知モードにおいて、ドライバーによる電話応対用の立ち寄り地の指定を受け付け(ステップ510参照)、その指定立ち寄り地までの経路を算出し(ステップ520参照)、着信に係る電話回線を一時的に開いて当該指定立ち寄り地までの予想到着時刻等の情報をその回線を介して発信元に送信し(ステップ530、540、550参照)、その後指定立ち寄り地に到着すると(ステップ570参照)、当該発信元の携帯電話とのハンズフリー通話を自動的に開始する(ステップ580、590参照)。
(もっと読む)
制御装置及び制御方法
【課題】走行中の運転者に対し速度超過を起こし易い地点を通過前に予告警報し、車両の速度違反を未然防止する。
【解決手段】各運転者が遵守すべき速度を超過した場合に走行経路上の速度超過位置( 経緯度) を登録し、次回以降同じ道路を走行する際に、その登録された速度超過位置の所定距離手前となると予告警報を行い、運転者に車両が速度超過をしないよう操作させる。また、次回以降同じ道路を走行する際に、各運転者が予告警報の指示に従い、過去の速度超過位置( 経緯度) で遵守すべき速度を遵守した度数をカウントし、遵守度数が所定値になると速度超過位置( 経緯度) の登録を解除する。
(もっと読む)
速度警告装置、その制御方法及び制御プログラム
【課題】長い下り坂や上り坂で速度の超過や低下を警告することにより、事故を防止し渋滞を緩和する。
【解決手段】比較部46は、地図ROM3から読み出す坂道情報(長い下り坂情報と長い上り坂情報)の位置範囲に自車位置がさしかかると、その長い下り坂情報又は長い上り坂情報に対応付けられた基準速度と、現時点の自車速度との比較により、自車速度が基準速度の一定範囲に達しているか否か判断する。この比較の結果、自車速度が基準速度の一定範囲に達したと判断された場合、報知部48は、ユーザーにその旨を音声メッセージなどにより報知する。
(もっと読む)
GPSロストの予測方法、GPSロストの予測装置及び車両用走行制御装置
【課題】 GPSロストに対してドライバが余裕を持って対応することができるようにする。
【解決手段】 自車両前方の撮像画像において、予め設定した経路上前方距離だけ前方の地点に開空率検出領域Adを設定し(ステップS1〜S3)、この開空率検出領域Ad内の画像に基づいて、前記前方地点に自車両が到達したときの将来開空率を予測する。例えば、開空率検出領域Adにおいて、空の領域の面積を検出し、この開空率検出領域Adにおける前方開空率を算出し、これを将来の開空率をする(ステップS4)。この将来の開空率がそのしきい値以下であるとき、GPSロストが生じると判断し(ステップS6)、これをドライバに通知する(ステップS8)。
(もっと読む)
推奨車速設定装置及び車両制御装置
【課題】 カーブを安定して走行するのに適切な速度を設定する推奨車速設定装置及び車両制御装置を提供すること。
【解決手段】 車両が走行する道路地図の情報が記憶された道路地図データベース5と、進行方向前方に存在するコーナの曲率及びコーナの道路長を抽出するコーナ情報抽出手段11と、コーナ情報抽出手段により抽出されたコーナの曲率又はコーナの道路長に基づき、当該コーナを走行するのに適した推奨車速を設定する推奨車速設定手段12と、を有することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】 実際の道路状況やドライバの意志等を経路に的確に反映させて利便性の高い自動操縦制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置8は、基準局4との通信が確立した際に、測位される自車位置に基づいて取得した走行ルートを用いて自車両1に対する走行制御ルートを学習する走行制御ルート学習制御、或いは、各走行制御ルートの中から利用可能な所定の走行制御ルートを選択して自車両1を自動操縦する自動操縦制御の何れかを予め設定された条件に従って選択的に実行可能な構成であり、しかも、ユーザによって走行制御ルート学習制御が選択されている場合には、当該走行制御ルート学習制御を優先的に選択して実行する構成となっている。これにより、実際の道路状況やドライバの意志等を経路(走行制御ルート)に適切に反映させることができ、利便性の高い自動操縦制御を実現することができる。
(もっと読む)
走行支援装置
【課題】マニュアル運転と自動運転の両方の運転機能を備えている車両を運転した際に、それぞれの運転状態に合った、車両周囲の状況など走行を支援する情報を報知すること。
【解決手段】どの情報を報知するか否かの判断基準を、各運転状態ごとに設定する。例えば、車両に対する危険度を複数のレベルに分け、報知しようとする内容がどのレベルに属しているかによって、報知するか否かを判定する。車両が自動運転しているときには、ドライバーの注意力が低下していたとしても、事故となることは少ないので、車両に対する危険度が低い情報については報知しないようにする。一方、車両がマニュアル運転をしているときには、ドライバーに注意力が低下すると、事故につながる恐れがあるので、車両に対する危険度が低い情報についても報知するようにする。これにより、各運転状態に合った警告をすることができる。
(もっと読む)
車両用警告装置
【課題】道路幅が狭く、前方の見通しが悪いカーブしている道路を走行する際に、対向車に注意して安全に走行できるようにすること。
【解決手段】車両前方に規定値以下のカーブ半径でカーブしている道路がある場合(ステップS40肯定判定)、さらに、その道路の道路幅が規定値以下か否かを判定する(ステップS60)。道路幅が規定値以下の場合には、その道路に進入する手前で、例えば、「この先カーブがあります。道路幅が狭いので対向車に注意してください」など、カーブしていることに対して警告するとともに、道路幅が狭いことに対しても警告を行う(ステップS70)。これにより、ドライバーは、そのカーブしている道路を十分に気を付けて安全に走行することができる。
(もっと読む)
経路案内装置およびプログラム
【課題】現在地の確認と走行経路の方向確認を、視線移動を必要とせずに行うことができる経路案内装置を提供する。
【解決手段】現在地周辺の地図画像と走行経路βと矢印αを重ねて表示する。この矢印αは、現在地を基準とし走行経路βに沿って所定長さを有し、重ねて表示する際の透過率を調整することで半透過状態となり地図画像や走行経路βを視認可能となっている。この矢印αは、車両の走行により現在地が経路上を移動していくことに伴って移動して表示される。(a),(b)では走行経路βが直進状態であるため、矢印αの形状・長さは変化せず、(b)に示すように矢印αの矢尻が交差点に到達した後さらに車両が走行すると、(c)に示すように矢尻が左折する。つまり、矢印αは走行経路βに沿って表示されるので、矢尻部分は矢印αの基準が存在する道路から左折した道路に位置することとなる。
(もっと読む)
車両支援方法及び車両支援装置
【課題】 勾配変化地点の先にコーナ開始点が存在し、そのコーナ開始点が視認できないとき、その旨を報知して運転者に的確な道路情報を伝達して走行中の違和感を解消する車両支援方法及び車両支援装置を提供する。
【解決手段】 車両C1の自車位置Paから予め定めた所定距離にコーナ開始点Pbと勾配変化点Pcがあって、その勾配変化点Pcが自車位置Paとコーナ開始点Pbの間にある時、自車位置Paからコーナ開始点Pbが視認できるかどうか判定する。そして、自車位置Paからコーナ開始点Pbが視認できないと判定したとき、その旨を運転者に報知する。
(もっと読む)
ナビゲーションシステム
【課題】ナビゲーションシステムが予想する到着時刻をより正確にする。
【解決手段】車両の走行環境の状態を検知する環境状態検知手段6を車両に設け、その環境状態検知手段6で検知した走行環境の状態に応じて目的地への予想到着時刻を変動させて算出するようにする。
(もっと読む)
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
運転支援システム及び運転支援方法
【課題】運転者が快適に車両を走行させることができるようにする。
【解決手段】車両の重量バランスを検出する重量バランス検出部45と、運転支援開始条件が成立したかどうかを判断する運転支援開始条件判定処理手段と、前記運転支援開始条件が成立すると、車両の重量バランスを読み込み、重量バランスについて運転者に助言する重量バランス警告処理手段とを有する。この場合、車両の重量バランスが読み込まれ、重量バランスについて運転者に助言されるようになっているので、適正な運転の支援が行われる。したがって、運転者は快適に車両を走行させることができる。
(もっと読む)
運転支援装置
【課題】運転者の技量に応じた運転操作の支援を行なうこと。
【解決手段】監視処理部11が道路情報収集装置31、速度センサ32、加速度センサ33、カメラ34、車両間通信装置35、レーダ36、灯火系50および車両制御系60の出力、さらにナビゲーション装置2が出力する位置情報や地図情報に基づいて、自車両の状態や周辺の状況を監視し、判定処理12が監視結果に基づいて運転の支援が必要であるか否かを判定し、支援処理部13が運転の支援を実行する運転支援装置において、運転者の技量を示す情報をドライバレベル記憶部15に記憶し、処理内容設定部14が運転者の技量に基づいて監視処理部11、判定処理部12および支援処理部13の処理内容を変更する。
(もっと読む)
車車間通信制御装置および車車間通信制御プログラム
【課題】すれ違うことができないほど狭い道路を挟んで2台の車両が対向して走行しているような場面において、車車間通信を利用して、対向車両よりも自車両が優先的にその狭い道路を走行できるようにする。
【解決手段】車両用ナビゲーション装置が、横幅が狭いため車両がすれ違うことができない可能性が高い道路にさしかかる度に、その手前で(ステップ205)対向車両がある状況において(ステップ210)、自車両が当該1車両道路手前で基準時間以上停止した後(ステップ220)、偽の自車位置を算出し(ステップ230)、算出した偽の自車位置を車両情報に含めて他車両に向けて送信する(ステップ240)。
(もっと読む)
道路と車両タイヤとの間で作用する摩擦を表す摩擦値を決定するための方法及び装置
本発明は、道路と車両タイヤとの間で作用する摩擦を表す摩擦値(Fμ)を決定するための方法に関する。このために、車輪のスリップのレベルを示す車両の車輪スリップ値(λij)が、車両の少なくとも1つの車輪のために決定される。摩擦値(Fμ)は、車輪スリップ値(λij)に基づき決定される。このため、車輪スリップ値(λij)は、予め規定された車両運転状態の間に異なる時点、特に、連続する時点に決定される。前記車輪スリップ値(λij)に基づき決定される車軸の車輪スリップ値(λij)又はスリップ値(λVA、,λHA)に関する頻度分布値が決定される。摩擦値(Fμ)は、前記頻度分布値を評価することによって決定される。 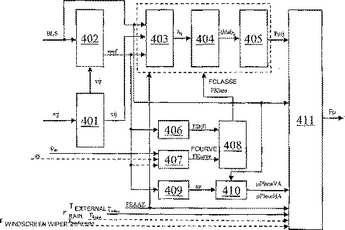 (もっと読む)
(もっと読む)
運転支援装置及び運転支援方法
【課題】 適切なタイミングで方向指示器の点滅を行うことができる運転支援装置及び運転支援方法を提供する。
【解決手段】 ナビゲーション装置1に備えられるCPU2は、画像センサ12等に基づいて、自車位置の周辺状況を検出する。また、CPU2は、自車両に設けられたウィンカー31を点滅させるための点滅制御信号を車両ECU30に送信する。CPU2は、目的地までの経路を探索し、探索された案内経路上においてウィンカー31を点滅させる対象地点を検出する。また、対象地点の手前に設定されたチェック地点において、周辺状況に基づいて、ウィンカー31を点滅させる点滅条件に該当するか否かを判断する。そして、点滅条件に該当すると判断した場合に、車両ECU30に点滅制御信号を送信する。
(もっと読む)
車両用ナビゲーション装置
【課題】 低コストで暗い道を避ける案内経路を適確に探索する車両用ナビゲーション装置を提供する。
【解決手段】 車両の現在位置を検出する位置検出手段と、車両の周囲の明るさを検出する照度検出手段と、現在日時を取得する日時取得手段と、取得した現在日時が夜間に含まれるかを判定する日時判定手段と、取得した現在日時が夜間に含まれる場合に、検出された車両の周囲の明るさが所定の値を下回るかを判定する照度判定手段と、検出された車両の周囲の明るさが所定の値を下回る場合に、現在位置およびその周辺を夜間走行困難区間として記憶する記憶手段と、を有する車両用ナビゲーション装置として提供可能である。
(もっと読む)
車両用運転支援装置及び車両用制御装置
【課題】本発明は、電波遮蔽物体が密集した交差点において、効率的な情報量で必要な情報を提供でき、受信側の負担を増大させることなく、双方向通信の有用性を高めることができる車両用運転支援装置の提供を目的とする。
【解決手段】本発明は、不特定多数の移動体との間で双方向通信が可能な通信装置を備えた車両用運転支援装置であって、自車の走行道路に交差する交差道路上を移動する移動体との通信により得た情報を用いて、電波を遮蔽する電波遮蔽物体が存在する通信抑圧交差点の存在を検出し、該通信抑圧交差点の存在が検出された場合にのみ、該通信抑圧交差点に関する通信抑圧交差点情報及び/又は前記交差道路上の移動体に関する移動体情報を、前記走行道路上の移動体に送信することを特徴とする。
(もっと読む)
441 - 460 / 463
[ Back to top ]