
Fターム[2G024CA08]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | 測定項目 (1,868) | 角変位、回転角 (41)
Fターム[2G024CA08]に分類される特許
1 - 20 / 41
駆動伝達機構具備装置
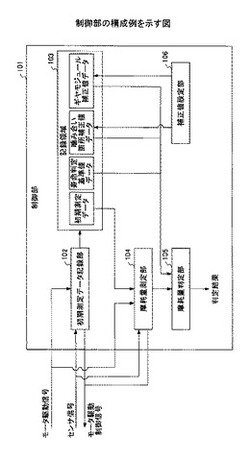
【課題】専用のセンサを設けることなくギヤの磨耗量を測定できるようにするとともに、適切な寿命判定を行えるようにする。
【解決手段】駆動源により駆動されるギヤ駆動列を有し、前記ギヤ駆動列に含まれるギヤの回転を検知する回転検知手段を有する駆動伝達機構具備装置であって、前記駆動伝達機構具備装置の初期状態において、前記駆動源の回転を制御し、前記回転検知手段の出力信号から初期測定データを取得して記録領域に記録する初期測定データ記録手段と、摩耗量の測定時において、前記駆動源の回転を制御し、前記回転検知手段の出力信号から測定データを取得し、前記記録領域に記録された初期測定データと比較して摩耗量を測定する摩耗量測定手段と、前記摩耗量測定手段により測定された摩耗量を予め設定された寿命判定基準値と比較することにより寿命判定を行う摩耗量判定手段と、前記寿命判定基準値に対する補正値を設定する補正値設定手段とを備える。
(もっと読む)
水中航走体の自動動作確認方法及び装置

【課題】水中航走体の動作確認に要する時間、手間、人手を削減する自動動作確認方法および装置を提供する。
【解決手段】アクチュエータ動作確認ステップSaにて、水中航走体の各スラスタと各舵に個別の動作指令を順次与えて、各スラスタと各舵に生じる動作と、対応するスラスタ回転数センサ、舵角センサの検出結果との整合性を確認する。次いで、水面動作確認ステップSbにて、各スラスタや各舵の動作と対応するセンサの検出結果との整合性がすべて確認された水中航走体を水面に浮かべて配置し、各スラスタを順に動作させて、そのときに生じる水中航走体の動作と、水中航走体に搭載してあるINS(慣性航法装置)とDVL(ドップラー式対水速度計)とGPS装置による検出結果との整合性を確認することで、各スラスタと対応するスラスタ回転数センサの同時接続間違いがなく、更に、水中航走体に搭載されたINSとDVLの向きが正しいことを確認させる。
(もっと読む)
車両用動力伝達装置の噛合伝達誤差測定装置
【課題】車両用動力伝達装置の実動温度における噛合伝達誤差を高い精度で測定することができる車両用動力伝達装置の噛合伝達誤差測定装置を提供する。
【解決手段】噛合伝達誤差測定装置10によれば、恒温装置50により、噛合伝達誤差の測定中にトランスアクスル12が加温されてそのトランスアクスル12が予め定められた測定温度に維持されるので、その測定温度をトランスアクスル12の実働温度に設定することにより、トランスアクスル12の実動温度における噛合伝達誤差を高い精度で測定することができ、トランスアクスル12の噛合伝達誤差を正確に評価することが可能となる。
(もっと読む)
バックラッシュ測定方法
【課題】ギアケースに組み込まれたギア間のバックラッシュを,特別な熟練を要することなく容易に測定し得るバックラッシュ測定方法を提供する。
【解決手段】ギヤケースに支承される第1伝動軸に連結した第1ギヤと,ギヤケースに支承される第2伝動軸に連結した,もしくは連結可能な第2ギヤとの間のバックラッシュを測定する方法であって,ギヤケース1をワーク保持体40の所定位置に保持する第1ステップと,第1伝動軸3を正転させる第2ステップと,第1伝動軸3の慣性回転を抑えつゝ正転を停止する第3ステップと,第2ギヤ17,18に負荷をかけつゝ第1伝動軸3を逆転させて,回転状況センサ99,107により第1伝動軸3の回転状況を検出する第4ステップと,電子制御ユニット46によって,回転状況センサ99,107の検出信号に基づきバックラッシュ値を演算する第5ステップとを実行する。
(もっと読む)
バックラッシュ測定装置
【課題】ギアケースに組み込まれたギア間のバックラッシュを,特別な熟練を要することなく容易に測定し得るバックラッシュ測定装置を提供する。
【解決手段】ギヤケース1内で互いに噛合してギヤケース1に支承されると共に,第1伝動軸3及び第2伝動軸10がそれぞれ連結される第1ギヤ16及び第2ギヤ17,18間のバックラッシュを測定する,バックラッシュ測定装置であって,ギヤケース1を所定位置に保持するワーク保持体40と,第1伝動軸3を正逆転させ得ると共に,その第1伝動軸3の回転状況を検出する回転状況センサ99,107を有する正逆転駆動機構45と,この正逆転駆動機構45の作動により第1伝動軸3を正転させた後,逆転させたときに回転状況センサ99,107の検出信号を受けてバックラッシュ値を演算し,その値の適否を判別する電子制御ユニット46とを備える。
(もっと読む)
機械角度測定装置
【課題】連続的な角度変化を測定できる機械角度測定装置を得ること。
【解決手段】機械角度測定装置は、機械要素5を回転させるモータ4の検出角度をフィードバックして、検出角度が指令角度に追従するようにモータを駆動することで、機械要素の機械角度を制御する装置において機械角度を測定する機械角度測定装置であって、回転する機械要素の位置、加速度および角速度の少なくとも1つを測定するセンサ1と、検出角度とセンサによる測定結果とから機械角度を計算する機械角度計算部10と、を備える。
(もっと読む)
回動操作具の荷重変位特性測定装置および荷重変位特性測定方法
【課題】快適な操作性を確保する安定した品質を実現するために、回動操作具の荷重変位特性を簡易かつ精度よく測定する。
【解決手段】回動して操作されるレバー200の荷重変位特性を測定する荷重変位特性測定装置であって、レバー200に固定されるクランプ102と、クランプ102に回転自在に接続されたロッド104と、ロッド104の回転角を検出する回転角計114と、ロッド104を移動させるアクチュエータ110と、アクチュエータ110の駆動軸112の移動量を検出する駆動軸変位計116と、ロッド104の軸力を検出する荷重センサ106とを備えたことを特徴とする。
(もっと読む)
回転2軸運動の同期精度の診断方法
【課題】回転2軸運動の同期精度を低コストで簡単に診断できる方法を提供する。
【解決手段】2軸のまわりに互いに独立に回転可能に支持された平坦なプレート面上の所定の位置に球を置く(S1)。プレートを、水平位置から、2軸のうちの一方の軸のまわりに、サイン関数の振幅で与えた角度でもって周期的に回転運動させるとともに、2軸のうちの他方の軸のまわりに、前記サイン関数と位相が+90°異なるサイン関数の振幅で与えた角度でもって周期的に回転運動させることによって、球をプレート面上において滑り運動することなく転動させる(S2)。プレート面上における球の運動の軌跡の、予め計算した基準円からの偏差を検出することによって、2軸のまわりの回転運動の同期精度を診断する(S3)。
(もっと読む)
試験装置
【課題】パワーステアリング装置の耐久試験を効率良く行える試験装置を提供する。
【解決手段】試験装置100は、ステアリングホイール20に回転力を入力するモータ10と、ピニオン26に作用する捩りトルクを検出するトルクセンサ11と、モータ10の回転角を検出する角度センサ12と、ステアリングホイール20が、右に切られ、捩りトルクが右側第1トルクとなった場合の回転角を右の第1角度として記憶し、左に切られ、捩りトルクが左側第1トルクとなった場合の回転角を左の第1角度として記憶し、更に右に切られ、捩りトルクが右側第2トルクとなった場合の回転角を右の第2角度として記憶し、更に左に切られ、捩りトルクが左側第2トルクとなった場合の回転角を左の第2角度として記憶する試験条件設定部40と、モータ10の回転角を右の第2角度と左の第2角度とに亘って繰り返し変更して耐久試験を行う試験実行部50と、を備える。
(もっと読む)
可変プーリのバックラッシュ測定装置
【課題】 簡易な構成で正確に可変プーリのバックラッシュを測定することができる可変プーリのバックラッシュ測定装置を提供する。
【解決手段】 可変プーリのバックラッシュを測定する装置であって、プーリシャフト3を回転自在の状態で垂直に支持する受け治具11と、この受け治具11に支持されたプーリシャフト3に嵌合する可動プーリ5を固定保持する保持手段12と、垂直に支持されたプーリシャフト3の上端部3aに固設され、上部13aに四角形の嵌合穴25を有するアダプタ13と、このアダプタ13の上部13aを中空軸14bに嵌合し、アダプタ13を介してプーリシャフト3の回動量を検出するエンコーダ14と、このエンコーダ14のケース体14aを回転不能に押圧固定する押圧手段15と、アダプタ13の嵌合穴25に嵌合してプーリシャフト3に正逆方向のトルクを付加するトルクレンチ16を備える。
(もっと読む)
センサ異常診断装置及びセンサシステム
【課題】作業者がセンサ設置現場におもむくことなく、傾斜センサの異常を判定する。
【解決手段】傾斜センサ10が出力する傾斜角と、自己診断部23によって正常に動作していることが診断されている加速度センサ20が出力する加速度とを用いて、判定部32が傾斜角と加速度の比に基づいて傾斜センサ10に異常が生じたことを判定する。
(もっと読む)
クラッチ付きプーリ用グリース劣化検出方法
【課題】クラッチ付きプーリのグリース劣化判定を簡単に行えるようにする。
【解決手段】回転軸30と、この回転軸30の外周に回転可能に軸支されるプーリ部35と、回転軸30とプーリ部35間に配置され、プーリ部35に対し回転軸30の一方向の回転を許容し、他方向の回転を阻止する一方向クラッチ40とを備え、回転軸30とプーリ部35間にグリースを封入したクラッチ付きプーリ14を対象としたクラッチ付きプーリ用グリース劣化検出方法において、前記プーリ部35とともに回転軸30を単位時間当り所定の回転数で回転させる回転工程71と、プーリ部35を停止させ、回転軸30を空転させる空転工程71と、プーリ部35と回転軸30の相対回転量を測定する測定工程と、相対回転量とグリース劣化判定基準とを比較してグリース状態を判定する判定工程74を備え、上記順に行う
(もっと読む)
回転装置の回転角度測定装置及び回転角度測定方法
【課題】加工装置の回転装置の回転角度を容易に精度よく測定することができるとともに、測定時間の短縮と作業コストの削減を可能にする回転装置の回転角度測定装置及び回転角度測定方法を提供することを目的としている。
【解決手段】回転角度測定装置1は、加工装置のテーブル2の上に設けられたエンコーダ取付台3と、このエンコーダ取付台3に載置されたエンコーダ4と、エンコーダ4に取り付けられたVブロック取付台5上に載置されたVブロック6と、回転装置7に取り付けられたボールプランジャ取付台8に設置されたボールプランジャ9、偏芯変位計10及び偏角変位計11と、回転角度指令装置12(加工機の制御装置)から回転装置7に指令された回転角度を検出する検出部13と、エンコーダ4、偏芯変位計10、偏角変位計11及び検出部13からの出力信号を処理する演算装置14とで構成されている。
(もっと読む)
通信設備情報収集システム及び通信設備情報収集方法
【課題】通信設備内の情報収集用の配線を削減し、また、外部へ情報を送信するタグを駆動する電池容量を小さく抑える。
【解決手段】マンホール400には、その壁面、床面、天井などに、複数のセンサ付きタグ100が配置されている。センサ付きタグ100は、取得した情報を、マンホール400内に設置した送受信タグ200へ、水中での伝搬で減衰が少ない低い周波数を用いて送信する。送受信タグ200は、受信したセンサ情報を、別の(空中での伝搬距離が長い)周波数の電波で送信する。測定用車両500に搭載したリーダ300は、送受信タグ200から所定の時間間隔で送信されるセンサ情報を受信する。
(もっと読む)
弁駆動装置におけるステムナットの摩耗量測定方法と装置
【課題】保守点検を要する電動弁駆動装置の設置状態のまま、ステムナットの摩耗量を容易に測定する測定方法と装置。
【解決手段】ステムを弁開閉いずれかの方向に一旦駆動した後、ステムの駆動方向を逆方向に反転して、ステムを駆動するに際し、ステムナットと協動するドライブスリーブ16の回転に伴い、距離検出センサ43に対して検出距離を漸次に変化させる部位と、ステムナットと協動するドライブスリーブ16の軸線方向の先端に、ドライブスリーブ16のガタ成分を検出する部位を備えた治具34を、ドライブスリーブ16の先端部に装着し、かつステムが動き出すのを検出する手段を備えている。
(もっと読む)
プラント運転状態監視方法
【課題】マハラノビス距離を求めるための演算を簡単に行うことができ、プラントが正常に運転されているか否かの判定を速やかに行うことができるプラント運転状態監視方法の提供を提供する。
【解決手段】本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程(A)と、 各データ群の状態量からマハラノビス距離を演算する過程 (B)と、各データ群で演算されたマハラノビス距離の最大値を選択する過程(C)と、選択された最大値を予め設定した閾値と比較する過程(D)と、前記比較結果によりプラントの異常の有無を判定する過程(E)と、を有することを特徴とする。
(もっと読む)
遊星歯車の不等配置検出方法および不等配置検出装置
【課題】遊星歯車機構の品質管理を徹底するべく、容易、かつ、確実に、プラネタリギアの不等配置を検出することができる不等配置検出方法および不等配置検出装置を提供する。
【解決手段】検出対象たる遊星歯車機構2bを回転駆動した際の、該遊星歯車機構2bの入力軸11、または、出力軸12の回転量と、入力軸11、または、出力軸12に作用するトルクとの相間を表す波形データを算出し、処理対象区間Xにおける前記波形データに対して線形近似線Sを算出し、さらに、線形近似線Sを基準として上限離間幅dHだけ離間した上限閾値線Hと、線形近似線Sから下限離間幅dLだけ離間した下限閾値線Lと、を設定するとともに、上限閾値線Hと下限閾値線Lによって規定される良品範囲Dを設定して、前記波形データにおいて良品範囲Dから外れている部位が存在することをもって、遊星歯車機構2bを構成するプラネタリギア3・3・・・の不等配置を検出する。
(もっと読む)
車両の検査装置及び検査方法
【課題】クラッチの自動切断機能を備える車両について、このクラッチの切断を精度の良く検査できる車両の検査装置及び検査方法を提供すること。
【解決手段】検査装置は、被検体のエンジン回転数と、被検体の車速を測定し、さらに、被検体の減速運転時において測定された車速に基づいて減速度を算出する。また、算出された減速度の所定の変化時間M4における変化量を減速度変化量ΔGとして、減速度変化量ΔGが所定の判定変化量M5を越えた際におけるエンジン回転数を検出切断回転数D1とする。検査装置は、この検出切断回転数D1が所定の判定回転数範囲[J1,J2]内にある場合には良と判定し、検出切断回転数D1が前記判定回転数範囲[J1,J2]外にある場合には不良と判定する。
(もっと読む)
操作子の評価システム及び評価データの生成方法
【課題】移動体に組み込まれる操作子の操作性を効果的に事前に評価するシステムを提供すること。
【解決手段】操作子の評価システム100は、移動体の操縦者により操作される操作子30の評価システムである。評価システム100は、操作子の出力30に基づいて操作子を評価するための第1評価データを生成する第1評価データ生成部、又は操作子30の操作時に操縦者が受ける身体的負担の測定値に基づいて操作子を評価するための第2評価データを生成する第2評価データ生成部を備える。操作子30の出力に基づいて生成された評価データによれば、操縦者の実際の操作内容を評価できる。操縦者が受ける身体的負担の測定値に基づいて生成された評価データによれば、操縦者の実際の操作負担を評価できる。これによって、実際の操作時に近い条件で操作子の操作性を評価できる。
(もっと読む)
トラクション計測用試験装置
【課題】 トラクション係数を精密に求めることができるようにする。
【解決手段】 駆動側試験片15を取り付けた駆動側回転軸16にACサーボモータ17を連結する。負荷側試験片18を取り付けた負荷側回転軸19に、トルク計20と負荷トルク可変型のブレーキ装置21を連結し、更に、ロータリーエンコーダ22を装備する。
駆動側試験片15を負荷側試験片18の外周面に所要の予圧力を付した状態で押し付けるための予圧力付与手段23を備えてトラクション計測用試験装置を形成する。ACサーボモータ17により駆動側試験片15の回転数の正確な制御とトルク監視を行わせ、一方、負荷側試験片18の回転数はロータリーエンコーダ22により精密に計測させ、又、負荷側トルクは上記トルク計20の検出値をブレーキ装置21にフィードバックすることで精密に制御させることで、トラクション係数とすべり率の高精度計測を行わせる。
(もっと読む)
1 - 20 / 41
[ Back to top ]