
Fターム[2G024CA09]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | 測定項目 (1,868) | 回転速度、角速度 (109)
Fターム[2G024CA09]に分類される特許
41 - 60 / 109
伝動ベルト評価方法と伝動ベルト評価装置
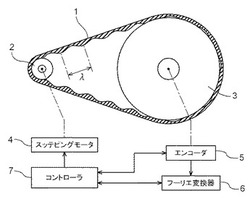
【課題】簡単な装置構成でもって伝動ベルトの回転変位伝達特性を高精度で評価できる技術を提供する。
【解決手段】駆動プーリ側の駆動回転変位によって従動プーリ側の従動回転変位を作り出す伝動ベルト1の回転変位伝達特性を評価する伝動ベルト評価装置は、駆動プーリ2と、駆動プーリ2より大径の従動プーリ3と、駆動プーリ2を一定角速度で回転させる駆動源4と、従動プーリ3の従動回転変位を時間−回転角に基づく波形データとして検出するエンコーダ5と、時間−回転角に基づく波形データに対してフーリエ変換を施してその周波数特性を出力するフーリエ変換器6とを備える。
(もっと読む)
検査装置

【課題】
スピンドルモータの回転むらを継続的かつ容易に測定することが可能な検査装置を提供する。
【解決手段】
検査装置10は、磁気ディスクを検査する検査装置であって、磁気ディスクを回転させ、1回転する間に所定の数のパルス信号を発生するスピンドルモータ1と、所定の周期を有する基準クロックを生成する発振装置4と、所定の数のパルス信号が発生する間に生成された基準クロックの数を測定する測定装置3と、基準クロックの数に基準クロックの周期を掛けることにより、スピンドルモータ1の回転時間を複数回演算する演算装置5とを有し、演算装置5は、得られた複数の回転時間を比較することにより、スピンドルモータ1の回転むらを算出する。
(もっと読む)
差動制限装置の検査システムおよびその方法
【課題】差動制限装置の検査を簡単な構成で行うことができる差動制限装置の検査システムおよびその方法を提供する。
【解決手段】本発明は、ESC制御ユニット200を備える車両に適用される。LSD制御ユニット100は、リアデフRD内に設けられ、連結される左右の後輪間の差動制限力を可変的に制御する差動制限装置を制御する。ESC制御ユニット200は、車両の走行状態に応じて4つの車輪のそれぞれに独立して制動力を供給させる。駆動輪である後輪を所定速度で回転させている状態において、LSD制御ユニット100により差動制限装置をONまたはOFFし、ESC制御ユニット200により一方の車輪にブレーキを掛けて、両車輪の車輪速を車輪速センサRL1、RR1により計測する。検査機器300は、計測された両車輪の速度差に基づいて、差動制限装置の故障を判定する。
(もっと読む)
鉄道車両の脱線検知装置
【課題】脱線に基づいて発生する振動等の物理量を確実に検知でき、しかも、この物理量の値を正常運行時にも発生する物理量の値と確実に判別できる様にして、鉄道車両が脱線した事をいち早く検知できる構造を実現する。
【解決手段】鉄道車両の車軸を、台車に対し回転自在に支持する転がり軸受の一部に、前記車輪の状態に応じて変化する物理量である振動を測定する振動センサを設ける。この振動センサが測定した、その瞬間のその車輪に関する振動値αと、比較すべき振動値βとの差の絶対値|α−β|を求める。そして、判定器により、この差の絶対値|α−β|が所定値γ以上の場合に脱線していると判定する。
(もっと読む)
転がり直動装置の異常判定方法および異常判定装置
【課題】ボールねじ装置の異常判定における誤判定を防止すると共に、初期段階における異常の判定を可能にする手段を提供する。
【解決手段】ねじ軸3と、ねじ軸3に複数のボール2を介して移動可能に支持されたナット5と、ボール2が循環する循環路と、循環路を循環するボール2による振動を検出する振動センサ10とを備えたボールねじ装置1の異常判定方法において、振動センサ10によりナット5の移動に伴う生振動データを取得し、この生振動データから周波数範囲に制限を加えて抽出した抽出振動データを取得し、その抽出振動データを基にボール通過周期Tiのバラツキを評価する標準偏差σを求め、その標準偏差σに基づいて異常の有無を判定する。
(もっと読む)
両歯面噛合式歯車検査装置
【課題】マスタ歯車の精度、被検査歯車の打痕の位置に左右されることなく、被検査歯車の1ピッチ噛み合い誤差、歯溝の振れ、打痕等の判定が迅速かつ正確に行なえる両歯面噛合式歯車検査装置を得る。
【解決手段】異なる歯数のマスタ歯車(16)と被検査歯車(17)とを接近方向に押圧付勢して互いに噛合させ、前記マスタ歯車(16)又は被検査歯車(17)をパルスモータ(4)によって回転させ、前記マスタ歯車(16)と被検査歯車(17)との軸間変動量を検出する検出器(検査歯車(17)の規定整数回転に転に間変動量をおける前記検出器(13)から入力するサンプリング数を一定とし、前記パルスモータ(4)に発する駆動パルスのパルス列、前記検出器(13)から入力するサンプリングの周期から、被検査歯車(17)の1ピッチ噛み合い誤差、及び歯溝の振れを求める。
(もっと読む)
ノイズ測定装置およびノイズ測定方法
【課題】簡単な制御でMG2によるノイズの測定精度を上昇させることのできるノイズ測定装置およびノイズ測定方法を提供すること。
【解決手段】本発明のノイズ測定装置1は,第1および第2の回転電機(MG1,MG2)を有する供試体10の回転時のアコースティックノイズを測定するものであって,第1および第2の入出力回転軸(31,32,33)の回転速度を個別に操作するモータ42,44,47と,各モータを制御する操作計測盤20と,供試体10のアコースティックノイズを取得するマイク24とを有し,第1および第2の入出力回転軸を,MG1が回転しない回転速度比にて回転させ,その状態でマイク24により供試体10のアコースティックノイズを取得するものである。
(もっと読む)
転がり軸受回転異常検出器
【課題】転がり軸受の初期異常を、転がり軸受を駆動しながら、非接触で求めることを可能にする。
【解決手段】転がり軸受を形成するコロまたは玉1と保持器10によって確保されるコロまたは玉1間の溝2に着目し、この磁気抵抗の差を求めることで、コロまたは玉1の位置または速度を検知し、この情報を解析することで転がり軸受の異常を予知する。磁気を用いた計測方式のため、水蒸気とか油の浮遊するような悪環境でも、高分解能の位置検出が可能となる。この結果、大きなトラブルが発生する前に、転がり軸受等の交換が可能となる。
(もっと読む)
車輪用軸受装置
【課題】温度上昇があっても安定した嵌合力でナックルに装着することができ、しかも、回転速度検出等の検出の安定して行うことが可能な車輪用軸受装置を提供する。
【解決手段】外径面に転走面28,29を有する内輪24A、24Bと、内径面に転走面26,27を有する外輪25と、外輪25の外側転走面26,27と内輪24A、24Bの内側転走面28,29との間に転動自在に収容された転動体30とを備え、少なくとも外輪25が冷間ローリングにて成形されて、外輪25の外径面50の軸方向中央部に環状凹部51が形成された車輪用軸受装置である。外輪25の環状凹部51に、耐熱性の合成樹脂からなる樹脂バンド17を充填する。樹脂バンド17にセンサユニットを配置した。
(もっと読む)
センサユニットの残り寿命判定方法及びその装置
【課題】
センサの残り寿命を正確かつ容易に判定することが可能な残り寿命判定方法及びその装置を提供すること。
【解決手段】
周期的に動作する機械に取り付けられつつ所定の負荷サイクル数によって規定されるセンサユニット10の残り寿命判定方法において、前記センサユニットへの負荷を前記負荷サイクルによって測定し、この測定された負荷に応じて、前記センサユニット10の負荷サイクルに対する劣化モデルを用いて該センサユニット10の劣化係数を算出し、前記負荷サイクルを前記負荷係数で重み付けする。
(もっと読む)
自動車構造部品の損傷予測方法
【課題】できるだけ簡単な方法で自動車構造部品の障害の早期かつ高信頼度の確認又は余命時間に関する予測を可能にする。
【解決手段】自動車構造部品に関する損傷モデルを構築するステップと、構造部品の負荷を検出するステップと、損傷過程全体に沿って又は損傷期間全体にわたってあるいはその両方で前記構造部品の酷使および損傷を検知するステップと、構造部品の前記検知された酷使又は損傷あるいはその両方に基づく参照損傷過程又は参照損傷期間あるいはその両方を決定するステップと、損傷過程又は前記損傷期間あるいはその両方と、対応する前記参照損傷過程又は前記参照損傷期間あるいはその両方とを比較するステップと、損傷過程と参照損傷過程とから又は損傷期間と参照損傷期間とからあるいはその両方とから切迫率を決定するステップとを含む自動車構造部品の損傷予測方法。
(もっと読む)
駆動力伝達装置及び駆動力伝達装置の調整方法
【課題】I−T特性のばらつきに応じて高精度に伝達トルクを制御できる駆動力伝達装置及びその調整方法を提供すること。
【解決手段】駆動力伝達装置14は、ECU13がメモリ17に記憶されたI−T特性マップに基づいて電磁クラッチ12に電流を供給することで、所望のトルクを伝達するように構成した。そして、ECU13は、車両1が学習可能状態であるか否かを判定し、車両1が学習可能状態であると判定された場合に、電磁クラッチ12に所定の電流を供給したときの車輪速差ΔWの変化を測定し、測定した値に基づいてメモリ17に記憶されたトルクカップリング6のI−T特性マップを補正するようにした。
(もっと読む)
風力タービンの伝動機構の疲労損傷を決定するための方法
風力タービンの設計および/または保守のために、少なくとも1つの回転可能シャフト(15)のトルクの推移および伝動機構の種々の構成要素(10)に結果として生じる疲労損傷を決定するための方法であって、伝動機構(10)の高速シャフト(35)におけるトルク(Tg)を決定するステップ、前記高速シャフト(35)における慣性モーメント(Ig)を決定するステップ、前記高速シャフト(35)の角加速度(αg)を決定するステップ、および伝動機構(10)の低速シャフト(15)におけるトルク(Tr)を式Tr=(Tg−Ig・αg)iによって決定するステップを含む方法が提供される。低速シャフト(15)におけるトルクの値(Tr)にレインフロー計数アルゴリズムを適用して、各々のトルク平均値のトルク範囲内のサイクル数を決定することができる。 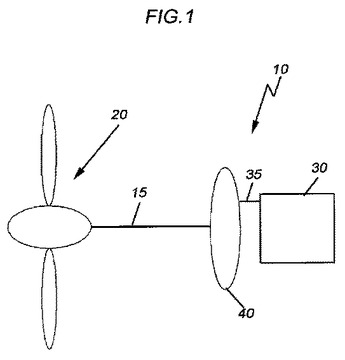 (もっと読む)
(もっと読む)
機械診断装置
【課題】 モータに連結された機械の動特性を把握する手段として、モータトルク指令からモータ速度までの周波数特性を調べることがあるが、現状の機械の動特性把握は、サーボ調整支援機能としてのみ利用されるのみであり、機械の異常(支持部の粘度が上がることによる摩擦力の増加)について診断することができなかったのを本発明で可能とした。
【解決手段】パソコン101からサーボアンプ102に数種類の速度指令を1パターンづつ送信し、モータ103の駆動中のトルク指令とモータ速度を取り込み、取り込んだデータに平均化処理を行い、その結果をグラフで表示させることにより、粘性摩擦や静止摩擦の増減が簡単に確認でき、この結果を基にして機械の不具合を診断することができる。
(もっと読む)
歯車伝動機のギヤノイズ評価方法及びその装置
【課題】より精度が高い評価をすることが可能な歯車伝動機のギヤノイズ評価方法及びギヤノイズ評価装置を提供する。
【解決手段】操作用PC6(算出手段及び評価手段)によって、ギヤノイズの計測時間内の総エネルギ量E2が算出されて、このギヤノイズの計測時間内の総エネルギ量E2に基き評価対象となるギヤ2のギヤノイズが評価されるので、ギヤノイズのピーク値に基いてギヤノイズを評価する従来技術と比較して、より精度が高い評価を行うことができる。
(もっと読む)
異常診断装置、及び異常診断方法
【課題】機械設備に組み込まれた回転部品や摺動部品について、異常の有無の診断及び異常の部位の特定を精度良く行う。
【解決手段】機械設備10の転がり軸受11から運転中に発生する振動を加速度センサ12で検出して信号処理器21に伝送し、デジタル信号に変換した後、エンベロープ分析及び周波数分析を行って周波数スペクトルのレベルを求めると共に、転がり軸受11の異常部位に起因する振動の異常周波数を所定の関係式に基づいて算出し、異常周波数に対応した周波数スペクトルのレベルを抽出する。そして、抽出した周波数スペクトルのレベルと、異常周波数の基本波及び高調波の周波数ごとに個別に設定されたしきい値とをそれぞれ比較照合し、その大小をそれぞれ判定することにより、異常の有無及び異常部位を診断する。
(もっと読む)
転がり軸受ユニットの状態量測定装置の検査方法
【課題】複数のセンサ6a、6b同士の位置関係を目視により確認できなくても、これら各センサ6a、6b同士の位置関係が適切であるか否かを、容易且つ確実に判定できる検査方法を実現する。
【解決手段】上記各センサ6a、6bを保持するカバー5を完成後の状態に結合する以前に、検査用エンコーダ10の検査用被検出面に、上記各センサ6a、6bの検出部を対向させる。そして、この状態で、上記検査用エンコーダ10を一定の速度で変位させつつ、上記各センサ6a、6bの出力信号同士の間に存在する位相差を求める。更に、この位相差に基づいて、上記カバー5に対する上記各センサ6a、6bの取付位置の適否を判定する。
(もっと読む)
転がり軸受ユニットの状態量測定装置
【課題】エンコーダ4及びセンサ6a、6bを取り付けた転がり軸受ユニット11、11と組み合わせて使用する、車体側に設ける状態量演算器12として好ましい構造を実現する。
【解決手段】上記状態量演算器12を、演算部であるCPU16に、記憶部であるフラッシュメモリ17を内蔵して成るものとする。そして、この状態量演算器12を、車両に搭載した上記各転がり軸受ユニット11、11とは別体の電子制御装置13に組み込んで設置する。この様な構成を採用する事により、上記課題を解決する。
(もっと読む)
車両用変速機の締結装置およびその締結方法
【課題】簡単な構成で、ロックナットの締結とギヤのバックラッシュ量の算出とを効率よく行うことのできる車両用変速機の締結装置を提供する。
【解決手段】変速機60の出力軸61を回転させるとともに、この出力軸61とロックナット68とを相対的に回転させる回転手段21,31と、出力軸61に作用する回転トルクを検出する回転トルク検出手段22と、出力軸61の回転角度を検出する回転角度検出手段23と、回転トルクと回転角度とに基づいてギヤ噛合系のバックラッシュ量を算出するバックラッシュ量算出手段46とを設け、回転手段21,31を、出力軸61を正回転させた後逆回転させるとともに、ロックナット68を出力軸61に対して相対的に回転させて出力軸61に締結させるよう構成するとともに、出力軸61の逆回転中に回転トルクが基準回転トルクに達した時点における出力軸61の回転角度に基づきバックラッシュ量を算出する。
(もっと読む)
ベルト伝達機構の解析方法
【課題】振動解析モデルを用いてベルト伝達機構の挙動を評価するベルト伝達機構の解析方法において、駆動プーリモデルの立ち上がり時における従動プーリモデルのスリップを回避し、ベルト伝達機構の解析/評価に要する処理時間を短縮化する。
【解決手段】振動解析モデルにより駆動プーリモデル31を回転駆動させて目標回転数とするまでの立ち上げステップでは、各従動プーリモデル32,33,34に所定の角速度を付与する模擬条件が用いられる。その結果、駆動プーリモデル31と各従動プーリモデルの周速度が一致するようになり、従動プーリモデル32,33,34がベルトモデル35に対してスリップしてしまうことが回避される。
(もっと読む)
41 - 60 / 109
[ Back to top ]