
Fターム[2G047GA04]の内容
超音波による材料の調査、分析 (29,493) | 特徴箇所探触子(一般) (1,650) | 保持、取付け、位置決め (458) | マニピュレータによる保持 (31)
Fターム[2G047GA04]に分類される特許
1 - 20 / 31
超音波探傷方法及び超音波探傷装置
【課題】被検体内部の探傷と、アレイ探触子と被検体の位置関係を正確に特定する位置調整を両立させて、アレイ探触子と被検体の位置関係のずれの少ない、より正確な超音波探傷が可能な超音波探傷方法及び超音波探傷装置を提供することにある。
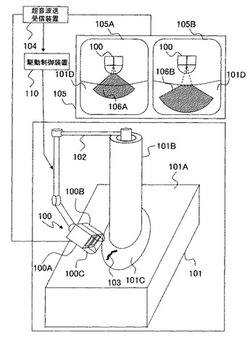
【解決手段】超音波探傷装置は、超音波センサ100から送信した超音波を、媒体を介して被検体101に伝搬させるとともに、遠隔走査機構102を用いて、超音波センサを走査する。送受信装置104は、超音波を媒体に送信し、被検体表面及び内部からの反射波を受信信号として受信する。表示部105Aには、被検体表面からの受信信号による探傷画像を、媒体の音速を用いて第一の音響画像として表示する。表示部105Bには、被検体中からの反射波を、前記被検体の音速を用いて第二の音響画像として表示する。
(もっと読む)
交換可能なプローブを組み込んだ非破壊検査のシステムおよび方法

【課題】ロボットアームと、ロボットアームに近接した保管デバイスと、保管デバイス内に配置された複数の非破壊検査(NDI)プローブ組立体とを含む非破壊検査デバイスを提供すること。
【解決手段】それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のために動作可能な少なくとも1つのトランスデューサ、およびロボットアームと対応する非破壊検査プローブ組立体450との間の機械的インターフェースとして動作可能なツールを含む。それぞれの非破壊検査プローブ組立体450は、部品の非破壊検査のための特定の非破壊検査タスクのために構成されており、ロボットアーム302は、部品の少なくとも一部の非破壊検査のために、ツールおよびプローブ組立体450の動きに選択的に係合するために動作可能である。
(もっと読む)
超音波計測装置および超音波計測方法
【課題】 被検体の表面が湾曲や多数の凹凸を有する場合であっても、被検体の表面に対して垂直に超音波ビームを入射させることができる超音波計測装置を提供する。
【解決手段】 被検体3を計測する超音波計測装置100は、超音波ビーム10を発信し、反射超音波ビームを受信する探触子1と、探触子1から発信された超音波ビーム10を被検体3へ向けて偏向し、且つ被検体3からの反射超音波ビームを探触子1へ向けて偏向する偏向装置30と、探触子1および偏向装置30を一体に走査する駆動装置とを有し、偏向装置30は、超音波ビーム10を偏向する偏向角度が可変である。
(もっと読む)
超音波探傷方法及び超音波探傷装置
【課題】アレイ探触子と被検体の位置関係を正確に特定し、アレイ探触子と被検体の位置関係のずれの少ない、より正確な超音波探傷が可能な超音波探傷方法及び超音波探傷装置を提供することにある。
【解決手段】超音波探傷装置は、超音波センサ100から送信した超音波を、媒体を介して被検体101に伝搬させるとともに、遠隔走査機構102を用いて、超音波センサを走査する。送受信装置104は、超音波を媒体に送信し、被検体表面及び内部からの反射波を受信信号として受信する。表示部105Aには、被検体表面からの受信信号による探傷画像を、媒体の音速を用いて第一の音響画像として表示する。表示部105Bには、被検体中からの反射波を、前記被検体の音速を用いて第二の音響画像として表示する。
(もっと読む)
板厚測定装置
【課題】鋼管柱の地際部分の腐食の程度を容易に測定できる板厚測定装置を提供する。
【解決手段】板厚測定装置10は、探触子を保持する走査部20と、走査部20を制御する制御部30とを含み、円筒状の鋼管柱42の内周の所望の位置に走査部20が載置されたとき、探触子を用いて前記鋼管柱の板厚を測定する。走査部20に保持された探触子を鋼管柱の内周の所望の位置に位置させるには、探触子送り込み治具を用いる。探触子が探触子送り込み治具によって所望の位置に載置されたとき、走査部20を鋼管柱42の内周に沿って移動させ、探触子の探傷した探傷データを制御部30へ送信する。
(もっと読む)
レーザ超音波検査装置及びレーザ超音波検査方法
【課題】表面形状が複雑な検査対象の非破壊検査を高速かつ高精度で行うレーザ超音波検査技術を提供する。
【解決手段】レーザ超音波検査装置10は、第1レーザR1を検査対象Kに照射して超音波を励起させる送信レーザヘッド21と、第2レーザR2を照射して検査対象Kを伝播する超音波を検出する受信レーザヘッド22と、この受信レーザヘッド22で検出した超音波に基づいて検査対象Kに含まれる欠陥を画像化するための信号処理部と、検査対象Kの表面に対する第1レーザR1及び第2レーザR2の入射角度を調整する角度調整部13と、から構成される。
(もっと読む)
アレイ探触子を用いた超音波探傷方法及び装置
【課題】探触子位置を機械的に移動することなく簡便に表面検査画像を作成する。
【解決手段】液中に浸漬したアレイ探触子101をフェーズドアレイ方式で動作させ、そのアレイ探触子101と被検体102の間で液体を介して超音波を送受信して、受信した情報に基づく検査画像を表示部104で表示する超音波探傷装置において、アレイ探触子101から被検体102の入射点に斜角超音波を発信して被検体102の表面に表面波105Bを発生させ、その表面波105Bの伝搬方向であるX軸方向と、電子走査で移動させられる入射点105の移動方向であるY軸方向とによるX−Y2次元座標軸にて検査画像を表示部に表示するための画像データを計算機103Aで作成し、表示部104に検査画像104AをCスコープで表示して可視化する。
(もっと読む)
超音波探傷システム
【課題】被検面が平滑ではない複雑な形状を有している検査対象の部位を超音波探傷すること。
【解決手段】検査対象の部位の表面に接触し得る大きさであって、超音波の送信用の超音波振動子と、超音波の受信用の超音波振動子とを有する超音波探触子100と、超音波探触子の受信用の超音波振動子が受信した超音波の大きさを示す信号であって、超音波探触子100から出力された信号を、開口合成処理する信号処理装置300とを備える。
(もっと読む)
構成部品を超音波検査するための方法及び装置
【課題】局部水浸法によって、平坦な構成部品(14)の表面(X−Y平面)の突出する構成部品部分(12)を超音波検査する。
【解決手段】テストヘッドホルダ(20)並びに対合ホルダ(22)がテストヘッド(50)を保持し、作動要素(30)によって制御され、第1の閉位置から第2の開位置に移動し、また、第1の閉位置に作動要素(30)によって操向される。第1の閉位置で、テストヘッドホルダ及び対合ホルダが構成部品部分(12)の側面(34、36)に接し、テストヘッドアセンブリ(16)が、構成部品(14)の輪郭及び/又は前記輪郭に沿った構成部品部分(12)を記載した指定されたデータセットに従って完全自動で検査する構成部品部分(12)の縦方向に移動し、構成部品部分(12)及び/又は平坦な構成部品(14)の輪郭変化が、Y方向に縦に移動するように浮動して支持されたテストヘッドアセンブリ(16)によって補償される。
(もっと読む)
触覚情報検出装置、及び、触覚情報検出方法
【課題】被検出対象面を人間がなでたときの手触りを示す触覚情報を簡易的な手法で精度よく検出することができる触覚情報検出装置を提供する。
【解決手段】被検出対象面と接触する接触子11と、接触子11が被検出対象面と接触した状態で移動したときに発生する摩擦音を検出する摩擦音検出用マイクロホン12と、少なくとも1種類の被接触面に対して、接触子11を接触させた状態で移動させたときに発生される摩擦音情報と、この被接触面の触覚情報とが対応付けて記憶されている情報記憶部17と、摩擦音検出用マイクロホン12により検出した摩擦音情報と、情報記憶部17に記憶されている摩擦音情報との相関値を算出して、当該相関値が所定値よりも高い摩擦音情報に対応付けられた触覚情報を、情報記憶部17から読み出して被検出対象面の触覚情報として出力する解析部20とを備える。
(もっと読む)
自動溶接/検査システムおよび検査ロボット装置ならびに溶接/検査ロボット装置
【課題】熟練した検査者の技術を必要とせず、また、スポット溶接部位の温度が下がるのを待つ必要が無く、溶接工程の中で溶接の良否を自動的に検査する自動溶接システムを実現する。
【解決手段】検査ロボット装置5は、超音波を用いて溶接の良否の検査を行うためのプローブ6と、このプローブ6を金属板2−1表面の溶接部位近傍に一時的に乗せておく手段である検査ロボット制御装置7と、プローブ6を介して複数の金属板2−1、2−2の境界面に対して斜め方向から超音波を入射させる手段である探触子8と、を備える。
(もっと読む)
自動溶接/検査方法および自動溶接/検査システムならびにプログラム
【課題】溶接工程の中で溶接の良否を自動的に検査する。
【解決手段】重ね合わせた複数の金属板2−1、2−2に対し、溶接を施し、この溶接の良否の検査を行うためのプローブ6を金属板表面のスポット溶接部位33近傍に一時的に乗せておき、このプローブ6を介して複数の金属板2−1、2−2の境界面に対して斜め方向から超音波を入射させてスポット溶接部位33の検査を行う溶接/検査方法であって、溶接の実施に先立ってプローブ6が正常か否かを検査するプローブ検査ステップと、プローブ6が正常である場合に、溶接を施す溶接実施ステップと、溶接が施された後に、この溶接の良否の検査を行う良否検査ステップと、を有する。
(もっと読む)
板厚の測定方法及び板厚検査装置
【課題】厚みの異なる外槽と内槽とからなる二重構造容器の内槽の板厚を超音波パルスの送受信により測定する方法を提供する。
【解決手段】外槽1bと内槽1aの空隙に超音波伝達物質9を充填した後、超音波センサ5により超音波パルスを内槽1a方向に向けて送受信し、超音波センサ5に受信して記録された超音波パルス信号の振幅強度が経過時間に従い減衰している超音波パルス信号群並びにその間隔ΔTを求め、次に超音波パルス信号群には属さず、かつ最初に記録された超音波パルス信号Aと超音波パルス信号群には属さず、超音波パルス信号Aとの間隔がΔTではなく、かつ最初に記録された超音波パルス信号との間隔を求め、その間隔と超音波パルスの伝播速度に基づいて内槽1aの板厚を演算する。
(もっと読む)
音波検査装置及び音波検査方法
【課題】 電子部品を水の中に入れて超音波探触子から出射される超音波を媒質に相当する水を介して音波検査を行う場合、電子部品は水に濡れて機能が劣化すること、水が中に浸入しない容器に入れて、水槽内に設置する方法があるものの、水を媒質にするために検査に至るまでに多くの時間、準備、及びコストを要する。
【解決手段】 探傷信号回路により発生する電気信号を音波探触子で音波に変換し、音波探触子に取り付けられたプローブの先端部を電子部品、半田若しくはプリント配線基板の測定物に直接、接触させた状態で、該音波を測定物に照射し、その反射波をプローブを介した音波探触子にて電気信号に変換した信号により該測定物の良否を判断する音波検査装置であり、検査対象である複数の測定物の測定位置に音波探触子に取り付けられたプローブの先端部を接触させて測定するための移動機構を備えている。
(もっと読む)
音波検査装置
【課題】 電子部品を水の中に入れて超音波探触子から出射される超音波を媒質に相当する水を介して音波検査を行う場合、電子部品は水に濡れて機能が劣化すること、水が中に浸入しない容器に入れて、水槽内に設置する方法があるものの、水を媒質にするために検査に至るまでに多くの時間、準備、及びコストを要する。
【解決手段】 探傷信号回路により発生する電気信号を音波探触子で音波に変換し、音波探触子に取り付けられたプローブの先端部を電子部品、半田若しくはプリント配線基板の測定物に直接、接触させた状態で、該音波を測定物に照射し、その反射波をプローブを介した音波探触子にて電気信号に変換した信号により該測定物の良否を判断する音波検査装置であり、CADデータを基に検査対象である複数の測定物の測定位置に音波探触子に取り付けられたプローブの先端部を移動後に、接触させて測定するための移動機構を備えている。
(もっと読む)
超音波検査装置
【課題】理想的な走査位置に対する種々の誤差を検出し、この誤差を自立的に調整することにより高精度な超音波探傷検査を行うことができる超音波検査装置を提供する。
【解決手段】本発明に係る超音波検査装置1は、超音波トランスデューサ17と、一体型超音波トランスデューサ制御部6と、距離制御用アクチュエータ15と、傾斜制御用アクチュエータ16と、距離計測用センサ18a、18bが一体に構成された一体型超音波トランスデューサ2を備える。この一体型超音波トランスデューサ2は、あらかじめ生成された走査経路情報に基づく走査位置と理想的な走査位置との誤差を算出し、この誤差に基づいて超音波トランスデューサ17の開口面と被検査物19の検査領域との距離および傾きを自立的に制御し誤差補正処理を行う。
(もっと読む)
超音波検査(UT)を三次元座標測定機(CMM)と統合するための方法及びシステム
【課題】機械構成要素を測定するのに使用する測定装置を組立てる方法を提供する。
【解決手段】本方法は、三次元座標測定機(CMM)を準備するステップを含む。本方法はまた、超音波検査(UT)機能及びCMM機能を組合せて検査プローブを形成するステップを含む。検査プローブは、該検査プローブがCMM機能を使用して機械構成要素の外部境界を測定しかつほぼ同時にUT機能を使用して該機械構成要素の内部境界を測定するようにCMM上に取付けられる。
(もっと読む)
超音波検査システム
【課題】正確なアライメントを必要とせず、検査物体の硬さや重さに関する情報を取得することができる超音波検査システムを供給する。
【解決手段】超音波送受波器1から広帯域変調波を検査対象物体11に送波し、検査対象物体11にラム波を励起する、ラム波3は円筒形状の検査対象物体11を円周方向に周回し、超音波受波器2によってラム波3周回周期に同期した周期性をもった受信信号が獲られる。これらの周期性を解析することによって、ラム波の伝搬速度が推定され、検査対象物体11の硬さ、重さなどが推定される。
(もっと読む)
レーザ超音波検査のための多関節ロボット
ターゲット材料を検査するように動作可能な超音波非破壊評価(NDE)システムが提供される。この超音波非破壊評価システムは、多関節ロボット、超音波検査ヘッド、処理モジュール、及び制御モジュールを含む。超音波検査ヘッドは、多関節ロボットに接続され、又はこれに取り付けられる。超音波検査ヘッドは、発振レーザ・ビーム、検出レーザ・ビームを送出し、ターゲット材料によって散乱される位相変調された光を集光するように動作可能である。処理モジュールは、位相変調された光を処理し、ターゲット材料の内部構造についての情報を生成する。制御モジュールは、予め決められたスキャン計画に従って超音波検査ヘッドを配置するように多関節ロボットを方向付ける。 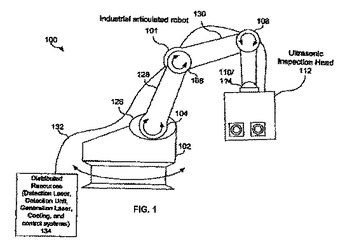 (もっと読む)
(もっと読む)
管の探傷用追従装置及びこれを用いた管の自動探傷装置
【課題】探傷センサを探傷時に周方向に回転する管に精度良く追従させる非接触式の管の探傷用追従装置等を提供する。
【解決手段】追従装置100は、非接触式変位計2と、探傷センサ1を管Pの軸方向に直交する平面内で移動させる位置決め手段3と、位置決め手段を制御する位置決め制御手段4とを備える。位置決め制御手段は、変位計及び探傷センサの位置関係と、管の回転数とに基づいて、変位計で変位を測定した管の部位が、管の回転中心を通りZ軸方向に延びる直線上の所定位置に到達するまでの時間を予測し、該予測時間経過後の管に対する探傷センサのZ軸方向の相対位置が略一定となるように、変位計で測定した変位と位置決め手段の動作遅れ時間とに基づいて位置決め手段を制御し、探傷センサをZ軸方向に沿って移動させる。位置決め制御手段は、X軸方向についても同様の制御を行う。
(もっと読む)
1 - 20 / 31
[ Back to top ]