
Fターム[3C007DS10]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 把持装置/把持部の配列が可変であるもの (118)
Fターム[3C007DS10]に分類される特許
1 - 20 / 118
ハンドおよびロボット
【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
直線運動リンク機構とこれを用いた布物のたぐり展開装置

【課題】小さな形状で布辺を把持し、2つのグリッパーで持った布辺部をたぐりだし両端を把持して展開して排出するロボットハンドおよび行程長よりも本体サイズが小さな直線運動機構を提供する。
【解決手段】菱形リンク機構と、その対角線上の両支点を両端で挟むように連結した2つの同じ長さの挟持リンク機構と、挟持リンク機構どうしを連結する支点と菱形リンク機構の他の一つの支点を両端で連結した2つの同じ長さの駆動リンク機構からなる直線運動リンク機構。および前記直線運動リンク機構と2連の平行四辺形4節リンクを結合するリンク機構。2連の平行四辺形4節リンク機構を連結するリンクは支点を共有しない選択肢を持つリンク機構およびこれをもちいた布物のたぐり展開装置。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
樹脂成形品の把持装置
【課題】樹脂成形品の把持装置において、樹脂製形品の把持不良を抑止し、かつ吸着部品による擦り傷等の発生を抑止すると共に、三次元的に複雑な表面形状の多種類の樹脂成形品にも対応可能とし、かつ当該装置の小型化及びコストダウンを図る。
【解決手段】当該装置の長さ方向に移動可能な垂直ロッド17の一端側の支持部材18は、係止部材35により垂直ロッド17に固定可能であり、他端側の支持部材18はシリンダ19により昇降自在であり、中央バキュームハウジング32及び外側バキュームハウジング12の表面には可撓性の当接部材32がそれぞれ配設され、かつ内部にはマニホールドがそれぞれ形成され、各バキュームハウジング12,31の当接部材32には、各マニホールドに連通すると共に樹脂成形品Wの表面に向けて開口する複数の開口32aがそれぞれ開設される。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
把持機
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
直交型組付装置
【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
搬送装置及び搬送方法
【課題】等間隔に配列された複数のワークを、不等間隔に供給できる搬送装置を提供すること。
【解決手段】搬送装置1は、等間隔に配列された複数のワークWを把持して搬送し、任意の間隔で供給パレット7に供給し、ワークWを把持する第1把持部11、第2把持部12、第3把持部13及び第4把持部14と、これら第1把持部11〜第4把持部14が連接された把持基体部20と、を備え、把持基体部20は、第1把持部11〜第4把持部14をワークWの配列方向に相互に近接、離間させる第1摺動部210、第2摺動部220、第3摺動部230及び第4摺動部240を備え、第1把持部11〜第4把持部14は、それぞれ別個にワークWと係脱する第1係合部110a及び第2係合部110b、第1係合部120a及び第2係合部120b、第1係合部130a及び第2係合部130b、第1係合部140a及び第2係合部140bを備える。
(もっと読む)
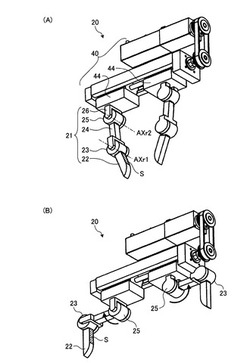
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
産業用ロボット
【課題】搬送対象物が上下方向で重ならないように配置される第2配置位置と産業用ロボットとの間にゲート部が配置されていても、本体部に対するハンドの旋回半径を小さくしつつ、ハンドとゲート部との干渉を防止することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、第1ハンド3および第2ハンド4と、アーム5と、本体部6とを備えている。第1ハンド3の基端部と第2ハンド4の基端部とは、上下方向で重なるようにアーム5の先端部に取り付けられている。第1ハンド3と第2ハンド4とは、アーム5に対して個別に回転可能であり、かつ、上下方向から見たときにアーム5に対して共通の回転中心C1を中心にして回転可能である。また、第1ハンド3と第2ハンド4とは、上下方向から見たときに屈曲するように形成され、かつ、上下方向から見たときに回転中心C1を通過する所定の仮想線に対して略線対称に形成されている。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
ワーク保持装置
【課題】ワークの変形を抑制してワークを安定して保持することが可能なワーク保持装置を提供する。
【解決手段】シート状のワークWを保持するワーク保持装置1であって、ワークWの一端を固定する固定手段10と、ワークWの一端を除いた端部に配置されるとともに、ワークWの面に平行かつワークWに対して外向きの張力を発生させる張力発生手段20と、を備えることを特徴とする。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
真空ピンセット及び真空吸着方法
【課題】反りがある半導体ウエハに対して、安定して吸着することができ、かつ、半導体ウエハを平らに矯正することができる真空ピンセット。
【解決手段】本体2と、本体2の端部に設けられた支持部3と、一端が支持部3に接続され、他端に吸着部5を備えた複数の先端部材4と、を少なくとも備え、先端部材4と支持部3と本体部2の内部に吸引流路10a〜10cが設けられた、反りを有する平板状の被処理体用Wの真空ピンセット1Aであって、複数の先端部材4は、反りの形状に合わせるように、及び、反りを矯正するように、支持部3に対して可動であることを特徴とする真空ピンセット1A。
(もっと読む)
1 - 20 / 118
[ Back to top ]