
Fターム[3D246HB12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 前方の車両 (469)
Fターム[3D246HB12]に分類される特許
101 - 120 / 469
車両制御装置
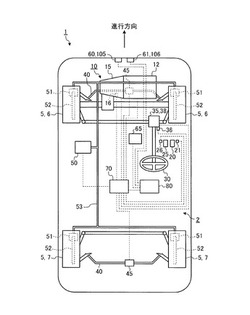
【課題】より精度よく、車両の走行制御を行うことのできる車両制御装置を提供すること。
【解決手段】車両1の走行を実現する複数のアクチュエータを、車両1の周辺の状況を検出する走行状況検出手段で検出した情報に応じて制御することにより車両1の走行制御を車両1の周辺の状況に応じて行うことが可能な車両制御装置2において、走行状況検出手段としてカメラ60、レーダー61、カーナビゲーションシステム65等の複数設けられており、これらの複数の走行状況検出手段で検出した複数の情報の信頼度に応じて、エンジン12や自動変速機15、EPS装置35、VGRS38、ブレーキ油圧制御装置50等の複数のアクチュエータのうち、一部のアクチュエータの制御量を制限する。
(もっと読む)
車群走行制御装置

【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
アクセル装置およびこれを用いた車両追突防止システム
【課題】機械の操作者が事故の危険に気付かずにアクセル操作を続けた場合でも、その事故を未然に回避することのできるアクセル装置およびこれを用いた車両追突防止システムが要求されている。
【解決手段】アクセル装置1は、アクセルペダル3と、スロットルレバー5にアクセルペダル3を接続するアクセルワイヤ6とを備えて成る装置であって、アクセルワイヤ6は、一端部7Aがアクセルペダル3に接続される駆動側部材7と、一端部8Aがスロットルレバー5に接続される従動側部材8とから構成され、駆動側部材7の他端部7Bと従動側部材8の他端部8Bとはクラッチ機構10を介して断続自在に連結され、クラッチ機構10を切断するための断続用スイッチ13が配備されている。このアクセル装置1は、例えば車両Bの追突防止システムAに用いられる。
(もっと読む)
車両制御装置
【課題】自車両と前方物標との間の衝突を防止するための運転支援を、衝突の危険性の度合に応じて行うことができる車両制御装置を提供する。
【解決手段】判定ユニットにより、少なくとも自車両と前方物標との間の相対速度に基づいた第1の値と、前記自車両と前記前方物標との間の相対加速度に基づいた第2の値の算出および前記第1の値、前記第2の値が閾値を超えたか否かの判定を行い、前記判定ユニットにより前記第1の値、前記第2の値が閾値を超えたと判定され、運転支援ユニットが前記自車両の運転支援を行う際、前記第1の値及び前記第2の値の双方が閾値を超えた場合は、前記第1の値もしくは前記第2の値の一方が閾値を超えた場合よりも、前記運転支援の介入量を多くする。これにより、自車両と前方物標との間の衝突を防止するための運転支援を衝突の危険性の度合に応じて行うことができる。
(もっと読む)
車両制御装置
【課題】車速制御中にドライバがブレーキ操作を行ったときに受ける違和感を防止する車両制御装置を提供することを課題とする。
【解決手段】自車両の車速を制御する車両制御装置であって、自車両のドライバのブレーキ操作を検出するブレーキ操作検出手段と、車速制御中に自車両のドライバがブレーキ操作を行ったときに当該ブレーキ操作における踏力が閾値以下の場合に車速制御の解除を禁止し、通常の車速制御とは異なるブレーキ操作時の車速制御に切り替え、自車両のドライバがブレーキ操作を終了した場合にブレーキ操作時の車速制御から通常の車速制御に切り替える制御切替手段を備えることを特徴とする。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
車両制御装置
【課題】制動回避が困難な場合において操舵回避を適切に行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、ECU5を備え、このECU5により、障害物に対する制動回避制御を行うために必要な必要減速度が算出されると共に、車両10の走行状態に基づいて制動回避制御を行うために車両10が実行可能な目標となる目標減速度が算出される。そして、ECU5により、必要減速度と目標減速度との差に基づいて、障害物に対する操舵回避制御の開始タイミングΔtが算出される。よって、必要減速度が目標減速度よりも大きく、制動回避制御が困難な場合、減速度の不足に応じて操舵回避制御の開始タイミングが決定されることとなる。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
リスク回避支援装置
【課題】自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供する。
【解決手段】 リスク回避支援装置のECUは、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の走行挙動(ふらつき等)に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)と自車両が後続車両に追突されるリスク(後衝突リスク)を演算し、これらの衝突リスクが等しくなるように、先行車両及び後続車両に対する自車両の車間位置を求め、これに応じてアクセル制御部8及びブレーキ制御部9を制御する。また、ECUは、先行車両の走行挙動に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算し、この追越リスクが前衝突リスクよりも低いときに、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する。
(もっと読む)
車速制御装置
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両の走行制御装置
【課題】ブレーキランプ23が点灯することなく走行制御装置の異常によって車両にブレーキが働くことを避ける。
【解決手段】衝突予知手段15からブレーキ作動信号を受けてブレーキ機構を作動させるブレーキ制御手段11と、該衝突予知手段15からランプ点灯指示信号を受けてブレーキランプ23を点灯させるランプ点灯回路13とを備え、ブレーキ制御手段11は、ブレーキ作動信号を受けたとき、ブレーキランプ23が点灯していることを条件としてブレーキ機構12による車両制動力を発揮させる。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
車両制御装置
【課題】衝突安全制御による車両の動作を体験できる車両制御装置を提供すること。
【解決手段】車両制御装置20は、自車両と障害物との間の距離および相対速度に基づいて自車両が障害物と衝突する可能性があるか否かを判断し、衝突の可能性がある場合には自車両の走行速度を減速させる衝突安全制御を行う車両制御装置20であって、衝突を回避できるか否かを判断し、衝突回避不可と判断した場合に衝突安全制御を行う通常走行処理手段251と、予め設定された体験走行実行条件を満たすか否かを判断し、体験走行実行条件を満たす場合には、通常走行処理手段251に代えて、衝突安全制御を行う体験走行処理手段252を有する。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、より多くの場面で被害軽減の大きな効果を得ることができる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダからの検出信号より障害物判定部(3a)にて障害物が移動物であるか静止物であるか或いは移動物から静止物となったものか等の障害物の状態を判定(S12,S16)し、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、自車と障害物の相対速度と障害物の状態とに基づいて、移動物及び移動状態から静止状態となった静止物については移動物用ブレーキ制御を行い(S14)、静止物については静止物用ブレーキ制御を行い(S18)、衝突予測時間算出部にて算出された衝突予測時間が各々の制御により設定された作動タイミングとなった時に警告灯、スピーカ或いは油圧アクチュエータへ作動信号を供給する。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
101 - 120 / 469
[ Back to top ]