
Fターム[3D246HB12]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 車外障害物 (944) | 前方の車両 (469)
Fターム[3D246HB12]に分類される特許
41 - 60 / 469
車両制御装置
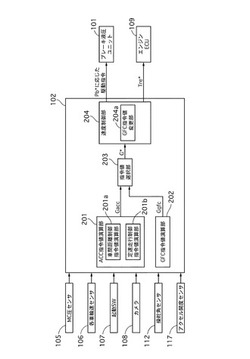
【課題】 カーブの走行安定性をより高めることができる車両制御装置を提供する。
【解決手段】 先行車と自車との相対関係を維持または設定された速度を維持するように自車の速度を制御するACC制御のACC指令値Gaccを演算するACC指令値演算部201と、自車に作用する横加加速度Gy'に基づき自車の速度を制御するGFC制御のGFC指令値Ggfcを演算するGFC指令値演算部202と、ACC指令値GaccまたはGFC指令値Ggfcのうち車両に作用する減速度の大きな指令値を選択する指令値選択部203と、選択されたACC指令値GaccまたはGFC指令値Ggfcに基づいてブレーキ液圧ユニット101およびエンジン121を駆動し自車の速度を制御する速度制御部204と、を備えた。
(もっと読む)
自動制御装置

【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
自動ブレーキ装置
【課題】自動ブレーキの不要な作動をより早い段階で抑制する。
【解決手段】ブレーキ機構2を作動させるアクチュエータ3と、アクチュエータ3の作動を制御する制御手段1とを備えた自動ブレーキ装置において、車両の前方を走行する先行車両の情報を検出する車両前方情報検出手段4,5と、前方情報に基づき車両と先行車両とが衝突する可能性を予測する衝突予測手段1aと、前方情報に基づき、先行車両が車両の走行領域から外れるか否かを予測する先行車両走行予測手段1bと、車両と先行車両とが衝突を回避できるか否かを判定する衝突回避判定手段1cと、を備える。制御手段1は、衝突予測手段1aにより衝突可能性があると予測されたら、衝突回避判定手段1cにより衝突を回避できると判定されない限りアクチュエータ3を作動させ、衝突を回避できると判定されたら、アクチュエータ3を非作動にする。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
衝突被害軽減制動制御装置
【課題】衝突発生時の被害の軽減化を図りつつ自動制動による操作性の低下の抑制を図る上で有利な衝突被害軽減制動制御装置を提供する。
【解決手段】制動制御手段44は、衝突判断手段40によって衝突が不可避であると判断された場合に、ブレーキアクチュエータ34を介してブレーキ装置32を作動させ、自車両2の自動制動を実行するものである。また、制動制御手段44は、車線逸脱判断手段36により自車両2が逸脱傾向にあると判断され、かつ、衝突可能性判断手段38により衝突可能性有りと判断されるという自動制動早期化条件が成立した場合に、衝突判断手段40の判断結果を待つことなく自動制動を実行するものである。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
車両の運転支援装置
【課題】自動ブレーキの介入後に起こり得る二次災害に対しても適切な安全対策を講じることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、衝突防止制御による自動ブレーキの介入によって自車両1が停車したことを判定したときハザードランプ20の点滅を開始し、当該点滅を、予め設定されたドライバの操作入力が行われるまでの間継続する。これにより、自車両1の急停車によってドライバが混乱している場合にも後続車等に対して注意喚起を行うことができ、自動ブレーキの介入後に起こり得る二次災害に対する適切な安全対策を講じることができる。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
衝突被害軽減装置
【課題】車両が障害物に衝突するおそれがある場合にブレーキを自動的に作動させる衝突被害軽減装置の作動精度を向上すること。
【解決手段】車両1が進行方向上の障害物に衝突するおそれがあると判定した場合に、車両1のブレーキ2を自動的に作動させる衝突被害軽減装置100であって、車両1の進行方向の画像を撮像するカメラ10と、カメラ10によって撮像され画像から車両1が走行車線を逸脱するか否かを判定する車線逸脱判定部42とを備え、車線逸脱判定部42によって車両1が走行車線を逸脱すると判定された場合には、ブレーキ2の自動的な作動を停止することを特徴とする。
(もっと読む)
車両制御装置
【課題】 ヨーモーメントを低減しても自車両が走行路外に逸脱することを抑制できる車両制御装置を提供する。
【解決手段】 自車両の後方車両を検出する後方車両検出部(17)を備え、ヨーモーメント指令値補正部(16)は、後方車両が検出されている場合に、車線逸脱傾向が有ると判断した場合には、車線逸脱防止ヨーモーメントの大きさ又は作動時間を調整して、当該車線逸脱防止ヨーモーメントの制御量を後方車両が検出されていない場合に比して低減し、車線逸脱防止ヨーモーメントの制御量を低減した後に、路外逸脱傾向が有ると判断した場合には、路外逸脱防止ヨーモーメントの大きさ又は作動時間を調整して、当該路外逸脱防止ヨーモーメントの制御量を増大する。
(もっと読む)
車両制御システム、車両制御装置、及び、車両制御方法
【課題】隣接車線から接近する物体に対する車両制御を行う技術を提供する。
【解決手段】車両の走行する車線に存在する物体を制御対象として物体と車両との車両進行方向の距離を一定の距離に保つように車両を制御して、車両が走行する車線と車線に隣接する隣接車線との境界を検出する。そして、車両の前方に存在する物体を検出し、車両が制御されている場合に検出された物体が境界を含む境界近傍の領域に存在するときは、物体を前記制御対象に含む処理を行う。これにより、車両が自車線を走行する物体を制御対象としている場合に、境界を含む境界近傍の領域に存在する物体と車両との衝突の危険性をなくすことができる。
(もっと読む)
ヨーレートのずれ検出装置
【課題】ヨーレートセンサにより検出されたヨーレート検出値のずれを正確に検出する。
【解決手段】自車両のヨーレートを検出するヨーレートセンサ30と、自車両の前方の物体を検知する前方物体検知センサ31と、前方物体検知センサ31により検知された物体が固定物であるのかを認識する前方物体認識部10と、前方物体認識部10により認識された固定物が自車両に対してその横方向に相対的に移動する横移動量を測定する横移動量測定部12と、横移動量測定部12により測定された横移動量に基づいて、自車両のヨーレートを推定するヨーレート推定部13と、ヨーレートセンサ30により検出されたヨーレート検出値の、ヨーレート推定部13により推定された推定ヨーレート値からのずれを検出するずれ検出部14とを設ける。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両用ブレーキ装置
【課題】自動制動制御機能により制動力を発生させるときに、回生ブレーキ装置へ制動力を配分して従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】マスタシリンダ、ポンプ、および液圧制御ユニットを有する液圧ブレーキ装置と、回生ブレーキ装置と、制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材の操作量に応じたドライバー目標制動力FT2を演算する手段と、ドライバー目標制動力FT2とは別に制動制御装置自身が各車輪の補正制動力FD2を設定する手段と、各車輪について、ドライバー目標制動力FT2および補正制動力FD2のうち大きい側を選択し基礎液圧制動力FB2を減算して補正後目標制動力FU2とする手段と、補正後目標制動力FU2を、各車輪の制御液圧制動力FC2と各駆動輪の回生制動力FG2とに配分制御する手段と、を有する。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
速度制御装置
【課題】移動体の速度制御を行う際に、移動体の運転者に違和感や恐怖感を抱かせることを抑制すること。
【解決手段】車両の運転者の注視点を定めるとともに、車両の周囲環境の運動を運転者の網膜球面を模擬した座標系に投影し、その投影した運動における、注視点から周囲に放射状に拡がる発散成分を算出する。さらに、注視点を含む所定のエリア内における、発散成分の総量を、車両の運転者が感じる速度感を示す指標として求める。そして、求めた発散成分の総量が一定となるように、車両の走行速度を制御する。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
41 - 60 / 469
[ Back to top ]