
Fターム[3E003DA05]の内容
Fターム[3E003DA05]に分類される特許
1 - 20 / 48
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
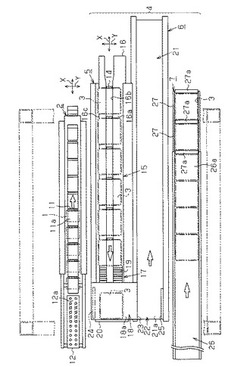
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
被包装物充填方法及び装置

【課題】挿入口を上向にして配置された包装容器内に複数の棒状の被包装物物を横向き姿勢で順次積み重ねた状態で容易且つ確実に、そして安定した状態で充填できる被包装物充填方法及び装置を提供する。
【解決手段】横向きの姿勢で供給される棒状の被包装物5を昇降ホッパー12内に順次受け入れて、昇降ホッパー内に位置する支持プレート20上へ順次積み重ね、その際、支持プレートは徐々に下方へ移動する。そして下降端位置に達する前に被包装物を昇降ホッパーの下部に設けられた支持バー24に引渡し、下降端位置に達した後、退避位置へ退避する。次いで昇降ホッパーは下方に位置した包装容器内に挿入され、容器の底近くの下降端位置に位置する。ここで、支持バーが解放位置へ移動して、被包装物が下方へ移動して包装容器内に充填される。そして、昇降ホッパーは容器から抜き取られる。
(もっと読む)
包装装置
【課題】包装袋の製造工程における手間やコストを縮減しつつ、被包装体の収容時における生産効率の低下を抑制できる包装装置を提供する。
【解決手段】包装装置1は、シート材を搬送する搬送機構110、搬送方向に沿ったシート材の第1側部6Cを、他方の第2側部6Dに沿うように、包装袋底部を基点にシート材を折る折り機構130と、シート材を交差方向CDに沿って一定間隔毎に接合して包装袋の側面を形成する接合機構150と、シート材を包装袋の側面に沿って切断する切断機構160と、収容手段からの包装袋の要求信号に応じて包装袋を供給するタイミング調整機構170と、を備える。
(もっと読む)
ベルト袋詰め装置
【課題】ベルトを袋詰めする作業の自動化が図れ、且つベルトを袋詰めする作業をより迅速に行うことができるベルト袋詰め装置を提供する。
【解決手段】ベルト用搬送機構4は、ベルト2を待機位置P5に搬送する。ケース5は、包装用袋3へのベルト2の挿入を案内するように構成されており、待機位置P5においてベルト2を収容している。袋供給機構6は、包装用袋3を挿入位置P2に供給する。ベルト挿入機構8は、挿入位置P2に配置された包装用袋3内へケース5とともにベルト2を挿入し、ケース5は包装用袋3から取り出す。袋シーリング機構9は、包装用袋3の開口部3aを加熱溶着して密閉する。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
整合装置及び封入封緘装置
【課題】用紙の幅寸法に対して封筒の幅寸法に余裕があるときに整合動作を省略して生産性を向上させる。
【解決手段】搬入した用紙の両側端を整合する整合部4を備えた整合装置1において、用紙を封入する封筒の封筒サイズ情報から得られる幅寸法から整合対象となる用紙の用紙サイズ情報から得られる幅寸法を差し引いた差分値と、予め設定された整合動作実行判別用閾値とを比較し、前記閾値を超えたときに整合動作を行わないように制御する制御部7を備えた。
(もっと読む)
小袋連続体の折りたたみ装置
【課題】たるみを防止しながら、小袋における穴や破れの発生を防止し、高速で運転可能な小袋連続体の折りたたみ装置を提供することにある。
【解決手段】小袋連続体の折りたたみ装置は、複数の小袋が連なってなる小袋連続体を収納箱に折りたたむ小袋連続体の折りたたみ装置であって、小袋連続体を所定の位置から上記収納箱まで搬送するフィードローラ部2と、モータ37により駆動されるフィードベルト36とを備え、小袋連続体は、ベルト36の上を、ベルト36の駆動方向に沿って搬送され、ベルト36は、フィードローラ部2により搬送される小袋連続体にブレーキをかけるように駆動される。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
箱詰め装置
【課題】製品を把持した後、旋回させることなく上下動させるのみで箱内への投入を行うことにより、製品の旋回に要する機構・工程を省略して簡素化し、製造コストを低減し、スペースを削減し、箱内への投入速度を向上する箱詰め装置を提供する。
【解決手段】無端のテーブルコンベヤ4,5は、同じ循環経路を構成するように揃えられているとともに各々が別々のサーボモータで駆動される。テーブルコンベヤ4,5は、供給コンベヤから順次供給される製品が移載されてサシミ状又は平置き状に集合される集合テーブル11,15を有しており、集合テーブル11,15が互いに重なることなくずれた状態で駆動される。投入装置50は、集合された製品群を一括把持する把持装置を備えており、集合テーブル11,15が次の集合のために移動した後、空いた空間を通じて下方に駆動され、把持した製品を直下に配置されている段ボール箱に投入する。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】製品と箱との間の隙間が狭い場合であっても、製品にダメージを与えることなく正確な箱詰めを行うことができる箱詰め装置及び箱詰め方法の提供。
【解決手段】製品保持部18において高さ違いに設けた一対の支持部材36、37に、ハップ剤aの積層体Aを傾斜した状態で支持させ、その状態のまま上面の内、外フラップC1、C2が開放された箱Cの内部に上方から挿入する。
(もっと読む)
ワーク移載装置、ケーサーシステム、およびワーク移載方法
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】フレームに組みつけられたワーク移載装置300であって、チャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に取り付けられ、第一形態から第二形態へワークWの配列を変換するための駆動力を発する動力源と、この動力源に接続された歯車部材と、フレームに少なくとも一部が固定され、第一位置から第二位置への配列変換部20の移動軌跡を規定し、歯車部材に噛み合う歯が形成された歯付き部材と、を備える。
(もっと読む)
間欠式物品挿入装置
【課題】プッシャ機構のワークエリアを小さくし、カートニングマシンの設計の自由度を高め、挿入効率も高める間欠式物品挿入装置を提供すること。
【解決手段】 物品挿入装置100は、コンベア201と202を用いてカートンCと物品Bとを同速で並進させ、その進行方向に直角な方向から物品BをカートンC内に挿入する装置であって、物品Bの上空に配した複数の掻込アーム121と、物品Bの載置間隔毎に前記複数の掻込アーム121を前記進行方向に直角な向きで一列に軸通する前記進行方向に配したアーム支持軸103と、アーム支持軸103を進行方向に移動させる並走用モータ105と、アーム支持軸103を進行方向に直角な方向に移動させる挿入用モータ106と、アーム支持軸103を軸回動して総ての掻込アーム121を一斉に上方に起き上がらせる軸動アクチュエータ107と、を具備する。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
商品充填方法および商品充填装置
【課題】 パラレルロボットを用いて商品の段ボール箱への導入を効率よく行う。
【解決手段】 パラレルリンク対44、45、46の先端に連結された吸着パッド47を一定の三次元空間内の任意の位置に配置し得るパラレルロボット4を用いた商品充填方法であって、第1の搬送コンベア2により商品Pを搬送しつつ、商品Pが充填される段ボール箱Bを第2の搬送コンベア3により搬送するとともに、段ボール箱Bのフラップのうち、第1、第2の搬送コンベア2、3間に配置される第1のフラップB1を、第2の搬送コンベア3の搬送方向に沿って延設された第1のガイドバー10によって、段ボール箱Bの搬送中に拡開させるとともに、パラレルロボット4の吸着パッド47により第1のコンベア2上の商品Pを保持し、これを第2の搬送コンベア3により搬送中の段ボール箱B内に、拡開された第1のフラップB1の上を通って導入する。
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
箱詰め装置
【課題】短時間で多量の商品の姿勢を変更することができる箱詰め装置を提供することである。
【解決手段】集積部AR1により包装物110が複数重ね合わされ、当該重ね合わされた包装物110が、第1搬送部200、第2搬送部400、第3搬送部410、伸縮性搬送部420により搬送される。伸縮性搬送部420は、第1整理板405、第2整理板406および第3整理板406を有し、第1整理板405は、包装物110を遮蔽または通過させるように進退移動し、第2整理板406は、伸縮性搬送部420の下流側から第1整理板405側への移動および第1整理板405側への回転の少なくとも一方を開始して包装物110の姿勢を変更させ、第3整理板406は、第1整理板405、第2整理板406により姿勢の変更された包装物110を箱詰め工程に移送する。
(もっと読む)
箱詰装置
【課題】簡易な構成で確実に包装物を一律に重ね合わせ、箱詰を行うことができる箱詰装置を提供することである。
【解決手段】箱詰装置100においては、第1搬送部200と、第1搬送部200の下方に設けられた第2搬送部400,410とを備える。第1搬送部200の下流端部には、下方に傾斜する傾斜部210が設けられる。柔軟な薄状体によって包装された包装物110が第1搬送部200から第2搬送部400へ落下され、集積部AR1において重ね合わせられる。包装物110は、第2搬送部400,410により第1搬送部200の搬送方向と逆方向の矢印M2の方向に搬送される。
(もっと読む)
手動支援型の空隙充填用ダンネージの分配システムおよび方法
梱包システム100は、制御装置102と、制御装置102と通信すると共に容器の1つまたは複数の特性を識別する入力装置104と、制御装置102と通信すると共に梱包担当者による選択用の複数の入力オプションを提供する手動入力装置106とを備えている。入力オプションは、梱包される1つまたは複数の物体によって容器が充填されている相対的な程度を示すものである。制御装置102は、選択された入力オプションおよび識別された容器の1つまたは複数の特性に基づいて容器に分配するダンネージの量を示す出力信号を供給する。制御装置は、一旦、容器の特性の情報と、梱包される物体によって容器が充填されている相対的な程度を示す選択された入力オプションとを受信すると、容器内に残留している空隙を充填するために提供する必要があるダンネージストリップの数および長さを決定することが可能である。制御装置102は、一旦、分配される必要のあるダンネージの量を決定すると、決定された量のダンネージを分配するように、ダンネージ分配器110に信号を送ることが可能である。  (もっと読む)
(もっと読む)
搬送装置およびこれを備えた箱詰め装置
【課題】所定の姿勢を保持しつつ物品をスムーズに搬送して生産性を大幅に向上させることが可能な搬送装置を提供する。
【解決手段】箱詰め装置1に備えられた搬送装置10では、商品Xを搬送する取り込みコンベア11と、取り込みコンベア11が商品Xを搬送する搬送方向aと交差する方向における取り込みコンベア11の搬送面の端部側において、商品Xとそれぞれ当接して商品Xを搬送方向aに搬送する一対のサイドコンベア12・13と、を有している。一対のサイドコンベア12・13は、一対のサイドコンベア12・13の搬送面が取り込みコンベア11の搬送面となす角度のうち少なくとも一方の角度が鋭角となるように、サイドコンベア12とサイドコンベア13とが対向配置されている。
(もっと読む)
1 - 20 / 48
[ Back to top ]