
Fターム[3E054FA03]の内容
包装位置への供給−物品の供給 (7,769) | 物品の取扱い(配列) (913) | 行 (61)
Fターム[3E054FA03]に分類される特許
1 - 20 / 61
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品供給装置

【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
箱詰め装置の運転方法
【課題】 物品収容部外へと物品を飛び出させるリスクおよび無端ベルトへの過剰負荷が、従来例よりも低減する箱詰め装置の運転方法を提供する。
【解決手段】 箱詰め装置100の運転方法は、整列コンベア2の運転パターンが、物品1の受け渡しにおける整列コンベア2での物品の処理能力に応じて区分けされている。そして、制御装置30が、検出手段20を用いて物品供給コンベア3での物品1の供給能力のサンプリングを行い、このサンプリングデータに基づいて物品1の供給能力の最大値を抽出し、この最大値に適合する運転パターンの設定値を用いて整列コンベア2での物品1の処理能力を調整する方法である。
(もっと読む)
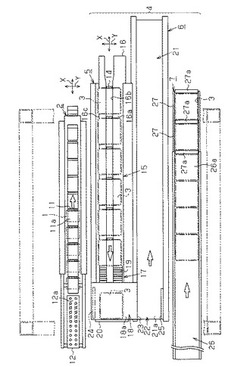
搬送装置
【課題】構造をシンプルにして小型化した搬送装置を提供する。
【解決手段】搬送装置10は、物品XA1を収容することができる複数のバケット19,20と、これらのバケット19,20を、水平方向に往復走行させる直動ロボット13,14と、バケット19,20を、鉛直方向に往復走行させるエアシリンダユニット15,16と、直動ロボット13,14およびエアシリンダユニット15,16を協働させて各バケット19,20を順次環状の移動軌跡上を循環させる制御部と、を備えている。
(もっと読む)
包装袋の計数集積装置
【課題】省スペース化を実現した包装袋の計数集積装置を提供する。
【解決手段】スティック型の包装袋pを複数列に亘って同時に製造しかつ間欠的に供給する包装機に付設された計数集積装置であって、開閉可能な底部を有し包装機から供給された包装袋pを各列に対応して収容する同列の下部収容室43と、下部収容室43の各底部を任意数開放して包装袋pを落下させる可動底板と、下部収容室列43Aの直下で循環走行可能に配され下部収容室43から落下した包装袋pを受けたのち集積部に移送して落とし込むコンベア60とが具備される。
(もっと読む)
集積供給システム
【課題】物品の形状や包装態様に関係なく、包装機に物品を供給できる集積供給システムを提供する。
【解決手段】集積供給システム12は、複数の物品XA1を外包機11に向けて搬送するベルトコンベア14と、ベルトコンベア14と協働するアームコンベア15と、物品XA1を外包機11に向けてガイドするガイドユニット16と、等を備えている。ガイドユニット16は、ベルトコンベア14のベルト33上に通路を形成する一対の外側ガイド部材46,47と、外側ガイド部材46,47に形成される通路を仕切って複数の小通路に分割する中間ガイド部材48〜52と、等を備えている。外側ガイド部材46,47は、外包機11に向かうに連れて互いの間隔が狭小となるようにベルトコンベア14の筐体45に取り付けられる。アームコンベア15は、ベルトコンベア14と共に、ベルト33に置かれた物品XA1を搬送するアーム57等を備えている。
(もっと読む)
麺玉形成袋入れ装置
【課題】麺玉w1を袋c1内へ収納したときに、麺線が封止位置に挟まることを防止する麺玉形成袋入れ装置を提供する。
【解決手段】麺玉形成袋入れ装置100は、搬送手段1と、麺玉形成部2と、袋収納部3を備えている。搬送手段1は搬送始点7aに供給された各麺線群wを、波状に屈曲された上り傾斜経路4を辿るように上昇させ、その上昇最中に各麺線に伸縮の弾圧力を付与する。麺玉形成部2では搬送手段1により上昇させた各麺線群wを丸めローラ25で丸めることにより麺玉w1を形成する。袋収納部3では、形成された麺玉w1を、袋c1内に自然落下させ該袋c1内に収納する。
(もっと読む)
箱詰め装置
【課題】外装箱に収容される物品列間の空隙を確実に抑制する。
【解決手段】箱詰め装置100の物品押し出し装置102は、物品整列位置P1に整列された複数の物品1を前後方向Yに押し出す際に、平面視において物品1の長軸が前後方向Yに対して傾斜するように、複数の物品1夫々の姿勢を変える姿勢傾斜手段40を備え、物品整列位置P1と物品群形成位置P2との間の経路上に、姿勢傾斜手段40によって変えられた複数の物品1夫々の姿勢を補正する姿勢補正手段15a〜15cが備えられる。
(もっと読む)
計数機
【課題】高速運転を確保しつつ、回転コンベアの収容空間へ確実に製品を収容することが可能な計数機を提供する。
【解決手段】本実施形態に係る計数機1は、所定の周回経路上で周回する周回部材20と、周回部材20に所定の間隔で設置された多数の仕切部材21とを有し、製品供給部25に落下してくる製品を仕切部材21間の収容空間に一枚ずつ収容させて搬送する回転コンベア装置10と、製品排出部29において所定の枚数単位で製品を押し出して排出する押出部材60と、周回経路と製品供給部25において上側で重なると共に製品排出部29において離れる所定の補助周回経路上で周回する補助周回部材40と、補助周回部材40に仕切部材21と同じ間隔で設置された多数の補助仕切部材41とを有し、補助仕切部材41が製品供給部25において仕切部材21の上側を同期して通過する補助装置30と、を備える。
(もっと読む)
ダブル型製品袋取出装置
【課題】ダブル型の間欠移送式袋詰め包装機で製造されグリッパーから解放された2個の製品袋を同時に受け取り、2個の製品袋の長さ方向を搬送方向に向け、1列に整列させた状態で搬出コンベア上に移す。
【解決手段】下向きに開閉する2組のチャック1,1と、2組のチャックを製品袋2,2の受取位置と放出位置の間で往復移動させるチャック移動機構3からなる。2組のチャックは、チャック移動機構3により受取位置から放出位置に移動する間に相対位置が変更され、受取位置では挟持する製品袋の袋幅方向に沿って一列に配列され、放出位置では挟持する製品袋の厚み方向に沿って一列に配列される。チャック移動機構は、揺動アーム8と、揺動アームに回動自在に設置されたチャック支持フレーム11を備え、チャック支持フレームの両側に2組のチャックが回動自在に設置され、チャック支持フレームとチャックは、それぞれ揺動アームの揺動に同期して回動する。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
箱詰め装置
【課題】製品を把持した後、旋回させることなく上下動させるのみで箱内への投入を行うことにより、製品の旋回に要する機構・工程を省略して簡素化し、製造コストを低減し、スペースを削減し、箱内への投入速度を向上する箱詰め装置を提供する。
【解決手段】無端のテーブルコンベヤ4,5は、同じ循環経路を構成するように揃えられているとともに各々が別々のサーボモータで駆動される。テーブルコンベヤ4,5は、供給コンベヤから順次供給される製品が移載されてサシミ状又は平置き状に集合される集合テーブル11,15を有しており、集合テーブル11,15が互いに重なることなくずれた状態で駆動される。投入装置50は、集合された製品群を一括把持する把持装置を備えており、集合テーブル11,15が次の集合のために移動した後、空いた空間を通じて下方に駆動され、把持した製品を直下に配置されている段ボール箱に投入する。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
方向転換装置を備えた箱詰装置
【課題】物品の搬送時における搬送姿勢を短時間でかつ確実に転回できる方向転換装置を備えた箱詰装置を提供することである。
【解決手段】本発明に係る方向転換装置220を備えた箱詰装置100は、方向転換装置220が転回装置221、回動軸222および回動板230からなる。転回装置221が包装物110f,110gに当接して、包装物110f,110gに力が付与されるとともに、回動軸222および回動板230により転回装置221による当接位置と異なる位置に力が付与される。
(もっと読む)
箱詰装置
【課題】集積部から挿入部まで物品の姿勢を起立姿勢の状態で、かつ物品の厚み方向に安定して移動することができる箱詰装置を提供する。
【解決手段】箱詰装置は、傾斜支持板570により包装物110の挿入部側が起立姿勢に保持され、第3姿勢制御板により包装物110の集積部側が起立姿勢に保持され、傾斜支持板570および第3姿勢制御板により包装物110が起立姿勢で保持されつつ包装物110の下面が接地されて移送される。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 第1の所定個別回転方向において、第1の基準角度位置から第1の単位角度より小さい所定角度の位置までの第1の所定角度範囲における速度より所定角度の位置から第1の単位角度の位置までの第2の角度範囲における速度が低くなるように第1及び第2の羽根車21、22を回転させる。
(もっと読む)
物品供給装置
【課題】高速包装処理時に前工程からの物品の供給に遅れが生じた場合、後工程の包装機への物品の供給タイミングに合わせて物品を移載できる装置を得る。
【解決手段】搬送コンベヤ5は前工程から搬送される物品を受入位置Aで区画部10に受け入れて排出位置Bまで搬送する。ロボット7は排出位置Bの区画部10から所定個数の物品を取り出す把持部16を有している。把持部16が搬送コンベヤ5から取り出した物品を、後工程の包装機3に接続した供給コンベヤ6に載置する。前工程から搬送される所定時間あたりの物品数に対する包装機3の処理能力の差によって、搬送コンベヤ5の受入位置Aから排出位置Bまでの区画部10に収容された物品の貯留量を変化させる際に、物品の貯留量を増加させる条件が満たされると包装機3の処理能力を低くし、物品の貯留量を減少させる条件が満たされると包装機3の処理能力を高くする。
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
搬送処理方法
【課題】物品の箱出しや箱入れをする際に安全性・安定性・作業性・経済性などを確保することのできる搬送処理方法を提供する。
【解決手段】
出入口22が開放保持された箱21を搬送ラインの箱出し操作部41にて上下反転させる。これで箱21外に出た横長姿勢の物品11を出発走行部51から姿勢変換部61まで搬送する。姿勢変換部61では、横長姿勢の物品11を縦長姿勢に姿勢変換し、それを処理作業部71〜73へ搬送して処理する。処理後の物品11を箱入れ操作部81まで搬送し、ここから箱配置部92側へ押し込む。箱配置部92では、押し込まれた縦長姿勢の物品11を開放状態の出入口22より箱21内に受け入れる。その後、物品入りの箱21を箱配置部92外へ搬送する。
(もっと読む)
1 - 20 / 61
[ Back to top ]